一种移动式消防机器人的制作方法
1.本发明涉及消防机器人技术领域,具体为一种移动式消防机器人。
背景技术:
2.随着社会经济的迅猛发展,建筑和企业生产的特殊性,导致化学危险品和放射性物质泄漏以及燃烧、爆炸、坍塌的事故隐患增加,事故发生的概率也相应提高。一旦发生灾害事故,消防员面对高温、黑暗、有毒和浓烟等危害环境时,若没有相应的设备贸然冲进现场,不仅不能完成任务,还会徒增人员伤亡。
3.消防机器人是特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用,可以有效保证消防员的生命安全,传统的消防机器人在针对某些情况时可能具有一定的弊端。
4.1、消防机器人工作时,可能由于前进道路的路况原因,难以使消防机器人到达指定的消防地点,从而影响消防机器人的消防作用;2、消防机器人移动过程中,用于探路的装置可能会受到部分地形遮挡,从而影响对消防机器人的移动的控制效果。
5.因此我们对此做出改进,提出一种移动式消防机器人。
技术实现要素:
6.为了解决上述技术问题,本发明提供了如下的技术方案:本发明一种移动式消防机器人,包括行进履带和基座,所述基座固定于行进履带的顶端,所述基座的顶端固定设有增高座,所述增高座的顶端设有活动组件,且所述增高座通过活动组件活动连接有中管,所述中管的一端固定连接有加长型喷管,所述加长型喷管与增高座之间设有调角辅助组件,所述基座的顶端一侧设有距离探测器,所述基座的侧面固定设有信号箱。
7.作为本发明的一种优选技术方案,所述活动组件包括固定座和活动轴杆,所述固定座固定于增高座的顶端并设置于中管的两侧,所述活动轴杆的一端通过轴承与固定座活动连接,所述活动轴杆的另一侧与中管的侧面固定连接。
8.作为本发明的一种优选技术方案,所述中管的一端固定设有第一分流管,所述第一分流管的分流连接点处固定设有第一控制阀。
9.作为本发明的一种优选技术方案,所述第一分流管的一个分流节点处固定连接有增压泵,所述第一分流管的另一个分流节点处固定连接有第二分流管,所述增压泵通过管道与第二分流管的一个分流节点处固定。
10.作为本发明的一种优选技术方案,所述第二分流管的分流连接点处固定设有第二控制阀,且所述第二分流管的导入口出固定连接有法兰盘。
11.作为本发明的一种优选技术方案,所述调角辅助组件包括活动座、液压杠、限位板,所述活动座固定于加长型喷管的侧面,所述液压杠的输出端与活动座的底端活动连接,
所述液压杠的底端固定连接有滑座,所述液压杠通过滑座滑动连接于限位板的顶端。
12.作为本发明的一种优选技术方案,所述限位板固定于增高座的一侧,且所述限位板的顶端开设有t型滑槽,所述滑座为t型结构并滑动连接于t型滑槽的内部。
13.作为本发明的一种优选技术方案,所述基座的顶端设有固定设有悬架,所述距离探测器活动连接于悬架的内侧。
14.作为本发明的一种优选技术方案,所述距离探测器的两侧均固定设有滑架,所述悬架的内侧开设有滑架配合滑动的限位滑槽,且所述悬架的顶端固定设有步进电机,所述步进电机的输出端穿过滑架并通过联轴器传动连接有丝杆,所述丝杆与滑架配合螺纹连接。
15.本发明的有益效果是:1、该种移动式消防机器人,由于前进道路的路况原因时消防机器人无法到达指定地点时,可以控制消防机器人移动到消防指定地点附近,利用调角辅助组件配合活动组件控制加长型喷管的倾斜角度,然后利用增压泵控制消防用水的二次增压,实现将消防用水准确喷洒到达指定位置,保障了消防机器人的消防作用;2、该种移动式消防机器人,在消防机器人移动过程中,利用步进电机配合丝杆控制滑架和距离探测器的高度,从而避免出现探路的装置可能会受到部分地形遮挡而影响工作的情况,保证了对消防机器人的移动的控制效果。
附图说明
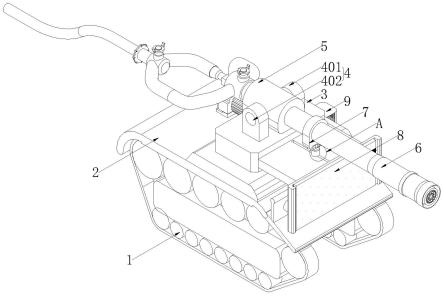
16.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:图1是本发明一种移动式消防机器人的整体轴侧示意图;图2是本发明一种移动式消防机器人的图1中a部分放大后的示意图;图3是本发明一种移动式消防机器人的距离探测器的高度调节的工作示意图一;图4是本发明一种移动式消防机器人的距离探测器的高度调节的工作示意图二;图5是本发明一种移动式消防机器人的消防机器人通水的水流流通路线的示意图。
17.图中:1、行进履带;2、基座;201、悬架;2011、限位滑槽;2012、步进电机;2013、丝杆;3、增高座;4、活动组件;401、固定座;402、活动轴杆;5、中管;501、第一分流管;502、第一控制阀;503、第二分流管;504、增压泵;505、第二控制阀;506、法兰盘;6、加长型喷管;7、调角辅助组件;701、活动座;702、液压杠;703、限位板;7031、t型滑槽;704、滑座;8、距离探测器;801、滑架;9、信号箱。
具体实施方式
18.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
19.实施例:如图1-图5所示,本发明一种移动式消防机器人,包括行进履带1和基座2,基座2固定于行进履带1的顶端,基座2的顶端固定设有增高座3,增高座3的顶端设有活动组件4,且增高座3通过活动组件4活动连接有中管5,中管5的一端固定连接有加长型喷管6,加长型喷管6与增高座3之间设有调角辅助组件7,基座2的顶端一侧设有距离探测器8,基座2的侧面固定设有信号箱9。
20.其中,活动组件4包括固定座401和活动轴杆402,固定座401固定于增高座3的顶端并设置于中管5的两侧,活动轴杆402的一端通过轴承与固定座401活动连接,活动轴杆402的另一侧与中管5的侧面固定连接;利用活动轴杆402与固定座401之间的自由活动,可以控制中管5的转动中心点,进而配合调角辅助组件7控制加长型喷管6的倾斜角,实现对不同高度的火情进行消防灭火。
21.其中,中管5的一端固定设有第一分流管501,第一分流管501的分流连接点处固定设有第一控制阀502;利用第一控制阀502可以控制第一分流管501的水流流入方向,便于根据实际的火情选择不同水压的水流。
22.其中,第一分流管501的一个分流节点处固定连接有增压泵504,第一分流管501的另一个分流节点处固定连接有第二分流管503,增压泵504通过管道与第二分流管503的一个分流节点处固定;利用增压泵504可以对流入的水体进行二次增压,而不经过增压泵504的水流只在流通消防管时进行一次增压,便于根据火情的距离和高度调整水压的大小。
23.其中,第二分流管503的分流连接点处固定设有第二控制阀505,且第二分流管503的导入口出固定连接有法兰盘506;利用第二控制阀505可以控制第二分流管503的水流导向,从而控制水流是否经过增压泵504,通过法兰盘506可以控制第二分流管503与外接的消防管连接,提高了在灭火过程中的消防管的移动效率。
24.其中,调角辅助组件7包括活动座701、液压杠702、限位板703,活动座701固定于加长型喷管6的侧面,液压杠702的输出端与活动座701的底端活动连接,液压杠702的底端固定连接有滑座704,液压杠702通过滑座704滑动连接于限位板703的顶端;当液压杠702的长度变化时,由于液压杠702的输出端与活动座701的底端活动连接,可以推动活动座701升高,配合液压杠702滑动连接于限位板703的顶端,实现对加长型喷管6的倾斜角度的调节。
25.其中,限位板703固定于增高座3的一侧,且限位板703的顶端开设有t型滑槽7031,滑座704为t型结构并滑动连接于t型滑槽7031的内部;利用滑座704的t型结构并在t型滑槽7031内滑动,可以控制滑座704移动时的稳定性,从而保证加长型喷管6倾角调节时的稳定性。
26.其中,基座2的顶端设有固定设有悬架201,距离探测器8活动连接于悬架201的内侧;
利用距离探测器8在悬架201的内侧滑动,可以控制距离探测器8的高度,从而避免在消防机器人移动过程中受到障碍物阻挡并影响其工作。
27.其中,距离探测器8的两侧均固定设有滑架801,悬架201的内侧开设有滑架801配合滑动的限位滑槽2011,且悬架201的顶端固定设有步进电机2012,步进电机2012的输出端穿过滑架801并通过联轴器传动连接有丝杆2013,丝杆2013与滑架801配合螺纹连接;步进电机2012工作时,可以带动丝杆2013转动,由于悬架201滑动于限位滑槽2011内部,且丝杆2013与滑架801配合螺纹连接,可以控制滑架801的高度,从而精确控制距离探测器8的高度,提高了装置的距离探测效果。
28.工作原理首先利用信号箱9配合控制器控制行进履带1,进而控制整个消防机器人的移动,直到消防机器人到达需要进行消防工作的位置,在此过程中,可以控制步进电机2012工作,带动丝杆2013转动,由于由于悬架201滑动于限位滑槽2011内部,且丝杆2013与滑架801配合螺纹连接,控制滑架801的高度,从而精确控制距离探测器8的高度;然后通过法兰盘506可以控制第二分流管503与外接的消防管连接,水流进入第二分流管503,然后根据实际的灭火需要,调节水流的流过位置,具体为:当水流对较近处进行灭火时,转动第一控制阀502和第二控制阀505,使水流依次经过第二分流管503、增压泵504和第一分流管501,当水流对较远处进行灭火时,转动第一控制阀502和第二控制阀505,使水流依次经过第二分流管503和第一分流管501;同时,根据实际的灭火需要调节加长型喷管6的角度,具体为:液压杠702工作且长度发生变化,由于液压杠702的输出端与活动座701的底端活动连接,推动活动座701升高,配合液压杠702滑动连接于限位板703的顶端,实现对加长型喷管6的倾斜角度的调节;这样即可完成装置的使用,且实现消防机器人的消防灭火工作。以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1