一种消防救援运输机器人及其使用方法
1.本发明涉及一种消防设备技术领域,特别是关于一种消防救援运输机器人及其使用方法。
背景技术:
2.近年来,大型火灾事故经常发生在施工工地、工厂和仓库,施工工地中多为易燃气体爆炸或者电气燃烧导致的爆炸;工厂和仓库多为易燃物品的引爆。由于火灾发生速度快,许多人来不及逃生被困火场,只能等待救援,其中因火灾被困而受伤以及未能及时治疗导致死亡的人数不在少数。所以对于火灾伤员的救治要做到尽快地发现,快速地把伤员送到安全的地带,及时的进行救治。而且将伤员运输到安全地带通常需要三人以上,救援人员则会暴露在危险的环境之下,来回往返于火灾现场和救护场所。这不仅效率低,还可能对伤员造成二次伤害,救援人员也可能因为急于救治伤员而因此受伤,最终使火灾现场损失较大。
3.现有专用于消防救援的救援运输机器人,由救援人员通过远程控制机器人进入火灾现场进行救援操作,可避免消防救援人员的受伤,且机器人的消防救援效率更高。但是现有消防救援运输机器人只具备单一的运输功能,没有对火灾伤员实施充足的保护和监护措施,而且有些有保护作用的救护车或者运输车又体积过大,不能直接到达火场导致机器人的消防救援效率无法进一步提高。
技术实现要素:
4.针对上述问题,本发明的目的是提供一种消防救援运输机器人及其使用方法,该机器人将伤员运输到安全地带使得伤员能够在黄金的救援时间之内得到救助,并减少救援人员的搜救时间、降低搜救风险。
5.为实现上述目的,本发明采取以下技术方案:一种消防救援运输机器人,其包括:车体,包括罩体,所述罩体内部形成安置舱,该安置舱的空间能容纳一个成年人平躺在其内部,且所述安置舱内放置有通用医用担架车;所述罩体顶部,沿所述罩体长度方向设置有用于向所述罩体外部喷射水进行降温的分流管;连接板,所述罩体外部一侧与所述连接板上部一侧活动连接;在所述连接板上,靠近所述连接板的第一端设置有通气孔,所述连接板的第二端上间隔设置有两个以上的排气孔,所述连接板一侧的中部设置有水管孔;底盘,设置在所述连接板的底部,所述底盘采用凹槽型结构,凹槽内设置有设备层。
6.进一步,所述连接板的第一端上设置有用于固定所述医用担架车的固定装置,所述固定装置将所述医用担架车的双轮间的固定杆推入所述固定装置并锁住;所述连接板的周向设置有一圈用于容置密封圈的密封槽。
7.进一步,所述设备层包括设备板以及安装在所述设备板上的水泵、蓄水箱、压缩空气罐和排风扇;
8.所述压缩空气罐设置在靠近所述底盘第一端的凹槽内,所述压缩空气罐的输出端通过送气管与所述通气孔连通;所述蓄水箱设置在靠近所述底盘第二端的凹槽内,其输出
端通过第一水管与所述水泵连接,所述水泵的输出端与第二水管的一端连接,所述第二水管的另一端穿过所述水管孔与所述分流管中部连通;
9.位于所述蓄水箱与所述底盘的第二端之间的所述设备板上开设有通风口,该通风口内设置有所述排风扇;所述排风扇的上部与排气管道末端连接,所述排气管道的进气端沿所述底盘长度方向延伸形成延伸部,并在所述延伸部上间隔设置有两个以上的进气短管,各所述进气短管与各所述排气孔连通。
10.进一步,所述排风扇的上部设置有风扇罩,所述风扇罩的顶部与所述排气管道的末端连接。
11.进一步,所述送气管上设置有用于控制所述送气管供气流量的电磁阀。
12.进一步,所述底盘的第一端底部固定有前车桥,第二端底部固定有后车桥;所述前车桥一侧固定有自转向装置,所述前车桥两端均固定有从动轮;所述后车桥两端均固定有电机,所述电机输出轴固定有主动轮;所述底盘内放置有用于为内部电气件供电的蓄电池。
13.进一步,所述设备板上设置有单片机和物联网通信器;所述物联网通信器内配置蓝牙模块或者支持4g、5g的无线传输模块,所述单片机通过所述物联网通信器连接位于现场指挥中心平台内的中央控制系统,所述单片机用于对所述水泵、电磁阀、排风扇、自转向装置和电机进行控制。
14.进一步,所述底盘的前侧壁固定有与所述单片机连接的防爆灯、摄像头和避障传感器;所述底盘第二端的设备板上设置有与所述单片机连接的气体传感器和温湿度传感器;所述底盘的后侧壁安装有与所述单片机连接的救援按钮和急停按钮。
15.进一步,还包括遥控器;该遥控器包括无线传输模块,以及通过该无线传输模块与所述单片机进行信息交互的方向摇杆、视角摇杆、遥控器急停按钮、照明开关和显示屏。
16.一种基于上述消防救援运输机器人的使用方法,其包括:救援人员按下救援按钮,则机器人进入求生模式,单片机通过物联网通信器连接中央控制系统,通过救援人员发出的求救信号,救援信号携带了被困人员的当前位置坐标,向中央控制系统上报救援信号;中央控制系统与建筑物内的全部火情探测设备通过物联网进行连接,接收全部的探测设备发送的火情信息,对接收到的火情信息进行综合分析,确定建筑内整体的火情分布和蔓延状况;当接收到每个机器人上传的救援信号之后,根据机器人的位置以及火情分布情况,结合建筑物地图,规划从求救者位置到最安全的安全出口的救援逃生路线;单片机通过物联网通信器从中央控制系统接收救援逃生路径;根据救援路径以及摄像头拍摄的前方画面,单片机控制调节机器人行进的方向和速度,进入火灾现场搭载被困人员沿着救援逃生路径逃生;同时,单片机控制机器人的各个部件在救援逃生过程中执行供气、喷水降温和排烟动作。
17.本发明由于采取以上技术方案,其具有以下优点:
18.1、本发明具有一个可以载人的安置舱,被救人员可以平躺在安置舱内,罩体具备隔热阻燃能力,且罩体上的分流管可以向罩体外表面喷水,保持其温度不过高,由机器人自身搭载的压缩空气罐向安置舱内部供气,且排除外界烟雾毒气,通过安置舱的作用,创造了隔热、阻燃、无毒的环境,防止给被救人员人身造成二次伤害。
19.2、本发明的单片机可以通过蓝牙模块或无线传输模块与中央控制系统进行通信,中央控制系统收到救援信号后,规划从出发点到被困人员位置再到安全出口的救援逃生路
线,车体即可搭载被困人员逃生。
20.3、本发明的车体底盘上设置有各种传感器,可用来探测灾害事故现场的各项数据,以及防爆灯和红外摄像头可保证可见度,以便消防救援人员进行合理的规划,并根据灾害事故现场情况合理安排,使消防救援运输机器人有序开展工作,对提高救援安全性、减少人员伤亡具有重要意义。
附图说明
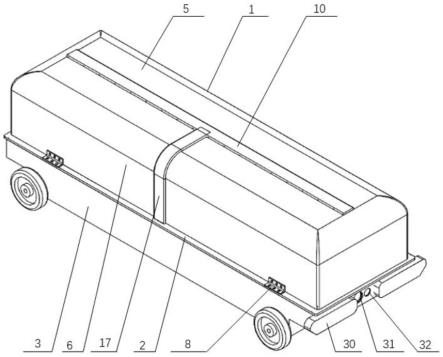
21.图1是本发明一实施例中的消防救援运输机器人整体结构示意图;
22.图2是本发明一实施例中摘掉罩体的结构示意图;
23.图3是本发明一实施例中防护罩的结构示意图;
24.图4是本发明一实施例中医用担架车展开的结构示意图;
25.图5是本发明一实施例中连接板的结构示意图;
26.图6是本发明一实施例中底盘的结构示意图;
27.图7是本发明一实施例中摘掉排气管与风扇罩的结构示意图;
28.图8是本发明一实施例中遥控器的结构示意图;
29.附图标记:
30.1-车体,2-连接板,3-底盘,4-设备层,5-罩体,6-安置舱,7-医用担架车,8-合页,9-把手,10-分流管,11-固定装置,12-通气孔,13-排气孔,14-水管孔,15-送气管道,16-排气管,17-第二水管,18-水泵,19-第一水管,20-蓄水箱,21-压缩空气罐,22-电磁阀,23-通风口,24-排风扇,25-风扇罩,26-单片机,27-物联网通信器,28-自转向装置,29-电机,30-防爆灯,31-摄像头,32-避障传感器,33-气体传感器,34-温湿度传感器,35-前车桥,36-后车桥,37-从动轮,38-主动轮,39-蓄电池,40-救援按钮,41-急停按钮,42-遥控器,43-遥控器方向摇杆,44-遥控器视角摇杆,45-遥控器急停按钮,46-照明开关,47-显示屏。
具体实施方式
31.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
32.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
33.本发明提供一种消防救援运输机器人及其使用方法,具有一个可以载人的安置舱,并且辅助各种阻燃、隔烟、降温的保护措施,能够为人们提供一个安全的空间。该机器人具有物联网通信功能,内置的单片机可以通过蓝牙模块或者支持4g、5g的无线传输模块与外界的中央控制系统进行通信;救援人员在发现被困人员时,向外界的中央控制系统发送求救信号,收到救援人员发出的求救信号后,根据救援人员的位置以及火情分布,规划从出发点到被困人员位置以及到运输到安全出口的救援路线。运输机器人具备载人自主行进功
能,被困人员进入安置舱内,车体即可搭载被困人员逃生。该消防救援运输机器人工作方法简单,在近距离和特殊情况下可切换为无线遥控手动操作,持续长时间执行救援、运输被救被困人员任务。通过该机器人携带的摄像头,可实时掌控火灾现场消防救援情况,以实现机器人智能化消防救援。本发明用于大型火灾事故现场,将伤员运输到安全地带使得伤员能够在黄金的救援时间之内得到救助,并减少救援人员的搜救时间、降低搜救风险。
34.在本发明的一个实施例中,提供一种消防救援运输机器人。本实施例中,如图1~图8所示,该机器人包括:
35.车体1,包括罩体5,罩体5内部形成安置舱6,该安置舱6的空间能容纳一个成年人平躺在其内部,且安置舱6内放置一辆通用医用担架车7,可与救护车携带的担架车替换使用;
36.连接板2,罩体5外部一侧与连接板2上部一侧活动连接,便于罩体5的打开或闭合;
37.底盘3,设置在连接板2的底部,且底盘3采用凹槽型结构,凹槽内设置有设备层4,设备层4的内表面铺设有隔热棉,降低腔内温度,以免内部的部件因火灾高温而损坏。
38.上述实施例中,如图1、图3所示,罩体5外部一侧通过两个合页8与连接板2顶部一侧活动连接,合页8可转动使罩体5开启和闭合。在罩体5另一侧的内外均固定有两个把手9,方便使用。在罩体5顶部,沿罩体5长度方向设置有分流管10,由分流管10向罩体5外部喷射水进行降温,防止安置舱6温度过高。
39.在本实施例中,罩体5采用钢化玻璃制成,并且在罩体5的外表面敷设一层隔热阻燃材料层。
40.上述实施例中,如图5所示,连接板2的第一端上设置有用于固定医用担架车7的固定装置11,通过固定装置11将医用担架车7双轮间的固定杆推入固定装置11并锁住,防止医用担架车7在移动过程中发生滑移。优选的,固定装置11采用挂钩结构。
41.位于连接板2的第一端,靠近固定装置11处设置有通气孔12;连接板2的第二端上间隔设置有两个以上的排气孔13,连接板2顶部一侧的中部设置有水管孔14。在连接板2的周向还设置有一圈用于容置密封圈的密封槽,在罩体5闭合时通过容置在密封槽内的密封圈起到密闭作用,防止外界有毒有害高温气体侵入安置舱6。
42.上述实施例中,如图6、图7所示,设备层4包括设备板以及安装在设备板上的水泵18、蓄水箱20、压缩空气罐21和排风扇24。
43.压缩空气罐21设置在靠近底盘3第一端的凹槽内,压缩空气罐21的输出端通过送气管15与连接板2第一端上的通气孔12连通;蓄水箱20设置在靠近底盘3第二端的凹槽内,其输出端通过第一水管19与水泵18连接,水泵18的输出端与第二水管17的一端连接,第二水管17的另一端穿过连接板2上的水管孔14与罩体5上的分流管10中部连通,用于为分流管10提供冷却水,如图1、图3所示。
44.在底盘3的凹槽内,位于蓄水箱20与底盘3的第二端之间的设备板上开设有通风口23,该通风口23内设置有排风扇24。排风扇24的上部与排气管道16末端连接,排气管道16的进气端沿底盘3长度方向延伸形成延伸部,并在延伸部上间隔设置有两个以上的进气短管,各进气短管与各排气孔13连通。进气短管的设置数量与排气孔13的设置数量相同。
45.优选的,在排风扇24的上部设置有风扇罩25,风扇罩25的顶部与排气管道16的末端连接,通过风扇罩25可防止有毒气体倒流进入安置舱6内。
46.优选的,在送气管15上设置有电磁阀22,通过电磁阀22控制送气管15的供气流量,从而使得安置舱6内相对于外界环境保持一定的正气压,同时可以避免外界环境中的有毒烟气渗透到安置舱6的内部。
47.使用时,由送气管15通过通气孔12将压缩空气罐21的洁净空气输入安置舱6,并且由排气孔13将安置舱6中产生的废气经由排气管道16排出车体1,使安置舱6中的空气保持循环流通。
48.上述实施例中,底盘3采用轮式底盘。如图6、图7所示,底盘3的第一端底部固定有前车桥35,第二端底部固定有后车桥36。前车桥35一侧固定有自转向装置28,前车桥35两端均固定有从动轮37。后车桥36两端均固定有电机29,电机29输出轴固定有主动轮38。底盘3内放置有蓄电池39,为内部电气件供电。
49.上述实施例中,设备板上还设置有单片机26和物联网通信器27。物联网通信器27内配置蓝牙模块或者支持4g、5g的无线传输模块,单片机26通过物联网通信器27连接位于现场指挥中心平台内的中央控制系统。使用时,根据单片机26的指令,可以实现对水泵18、电磁阀22、排风扇24、自转向装置28和电机29等部件的控制,从而使本发明的机器人执行喷水降温、供气、排烟、运动转向等动作。
50.上述实施例中,如图6、图7所示,底盘3的前侧壁固定有与单片机26连接的防爆灯30、摄像头31和避障传感器32。摄像头31和避障传感器32将采集到的数据传输至单片机26内,实现对现场机器人周围的环境状况实时采集及防止底盘3运行时碰撞障碍物。防爆灯30可辅助摄像头31在浓烟情况下清晰拍摄,摄像头31具有红外摄像功能,可在黑暗的情况下正常拍摄。使用时,单片机26通过蓝牙模块或无线传输模块与中央控制系统进行通信,可将红外摄像头31采集的数据进行处理并反馈至遥控器操作终端及现场指挥中心平台上。优选的,底盘3及其所有附件均采用耐高温设计。
51.位于底盘3第二端的设备板上还设置有与单片机26连接的气体传感器33和温湿度传感器34。气体传感器33和温湿度传感器34将实时获取的周围环境信息传输至单片机26。使用时,气体传感器33将检测的火灾现场有毒气体浓度,包括一氧化碳和甲烷,传输至单片机26;温湿度传感器34将检测的机器人周围环境及车体内温湿度传输至单片机26,单片机26通过蓝牙模块或无线传输模块与中央控制系统进行通信,可将气体传感器33和温湿度传感器34采集的数据进行处理并反馈至遥控器操作终端及现场指挥中心平台上,以便救援人员和指挥人员观察环境信息。
52.在本实施例中,底盘3的后侧壁安装有与单片机26连接的救援按钮40和急停按钮41。救援人员按下救援按钮40,本消防救援运输机器人开始返程工作。急停按钮41可预防意外发生,紧急停车。
53.上述各实施例中,本发明的消防救援运输机器人还包括遥控器42。如图8所示,该遥控器42包括无线传输模块,以及通过该无线传输模块与单片机26进行信息交互的方向摇杆43、视角摇杆44、遥控器急停按钮45、照明开关46和显示屏47。
54.通过方向摇杆43控制机器人前进、倒退、转向动作,通过视角摇杆44可以调整机器人底盘3上携带摄像头31的视角,急停按钮45与底盘3后侧的急停按钮40功能一样,按下照明开关46可控制底盘3上携带防爆灯30的开闭,遥控器42与单片机26进行数据双向传输,显示屏47可实时显示消防救援运输机器人的工作状态及采集到的各项信息,便于救援人员及
指挥中心观察前方路况。本实施例中,显示屏47为触摸屏。
55.上述各实施例中,各部件均达到防爆等级it6。
56.在本发明的一个实施例中,提供一种消防救援运输机器人使用方法,该使用方法基于上述实施例中的消防救援运输机器人实现。在本实施例中,消防救援运输机器人可跟随消防救援人员进入火灾现场,在医用救护车无法抵达或靠近火场的情况下,运输被困人员和伤员。具体的,该使用方法包括以下步骤:
57.1)救援人员按下救援按钮40,则机器人进入求生模式,单片机26通过物联网通信器27连接中央控制系统,通过救援人员发出的求救信号,救援信号携带了被困人员的当前位置坐标,向中央控制系统上报救援信号;
58.2)中央控制系统与建筑物内的全部火情探测设备通过物联网进行连接,接收全部的探测设备发送的火情信息,对接收到的火情信息进行综合分析,确定建筑内整体的火情分布和蔓延状况;当接收到每个机器人上传的救援信号之后,根据机器人的位置以及火情分布情况,结合建筑物地图,规划从求救者位置到最安全的安全出口的救援逃生路线;单片机26通过物联网通信器27从中央控制系统接收救援逃生路径;
59.3)根据救援路径以及摄像头31拍摄的前方画面,单片机26控制调节机器人行进的方向和速度,进入火灾现场搭载被困人员沿着救援逃生路径逃生;同时,单片机26控制机器人的各个部件在救援逃生过程中执行供气、喷水降温和排烟动作。
60.上述步骤1)中,一旦发生火灾,特别是在大型火灾现场,建筑物空间内部明火四处扩散,浓烟蔓延,能见度显著下降,消防救援人员进入火场对被困人员进行搜救,医疗救护人员在场外安全地带等待,当救援人员发现被困人员时,向中央控制系统发送信号,信号包括被困人员的位置信息与被困人员的生命体征状态,中央控制系统在收到信号之后,根据救援人员和其他搜救设备反馈的信息,规划最短路线使得运输机器人到达被困人员位置,医护人员根据被困人员生命体征状态信息准备急救药品和设备;救援人员将受伤严重或无法移动的人员安置于安置舱6内,按下救援按钮40,单片机26可以通过蓝牙模块或无线传输模块与中央控制系统进行通信,中央控制系统向运输机器人发送最新规划求生路线。
61.上述步骤2)中,中央控制系统与建筑物内的全部火情探测设备通过物联网进行联通。其中,火情探测设备可安装在消防员的可穿戴设备上和消防灭火机器人本体上,随着救援人员和灭火机器人或侦察机器人的移动分布在建筑物内的不同区域,用于采集对应区域内的火情信息,并将火情信息上传至中央控制系统。
62.在本实施例中,火情探测设备可以是红外摄像头、温湿度传感器以及有毒有害气体传感器,其探测的火情信息包括探测设备自身所在位置的周围是否有明火点以及周围环境的温湿度,该温度可以间接反映探测设备自身所在位置周围的明火状况,通常情况下,明火火势大则温度较高,明火火势小则温度较低;当有毒有害气体浓度过高时,有毒有害气体传感器会发出警报,以提醒救援人员做好自身防护并警惕意外爆炸的发生。此外,火情探测设备还可以是烟雾浓度传感器和光照亮度传感器,获得探测设备自身所在位置的周围的烟雾浓度与能见度。
63.上述步骤2)中,中央控制系统接收全部的探测设备发送的火情信息,对火情信息进行综合分析,确定建筑内整体的火情分布和蔓延状况。当接收到运输机器人上传的救援信号之后,根据机器人的位置以及火情分布,结合建筑物地图,规划从被救人员位置到最安
全的安全出口的救援路线。
64.具体的,中央控制系统可以根据明火位置、温度、有毒气体、烟雾浓度和能见度,在地图上标注上危险区域,例如明火点区域、毒气有毒有害气体、烟雾浓度过高的区域、空气温度过高的区域以及能见度低的区域,根据地图中记录的每个安全出口位置,规划从当前位置出发到各个安全出口位置的各种备选路径,利用路径规划算法并对路径的长度、途径的危险区域等进行评分,确定最安全的求生路线。然后中央控制系统将求生路径下发给本运输机器人。
65.机器人根据求生路径,由单片机26控制自转向装置28和电机29,调节机器人行进的方向和速度,车体1即可搭载被救人员沿着求生路径到达安全出口。
66.综上,本发明在使用时,求救者平躺于安置舱6内,罩体5具备隔热阻燃能力,且罩体5上的分流管10可以向罩体5外表面喷水,保持其温度不过高。同时单片机26控制电磁阀22打开,压缩空气罐21即可通过送气管15向罩体5内部供气,可以保证被救者呼吸安全,不至于发生中毒和窒息。在行进过程中,摄像头31还用于拍摄前方画面,并将画面传至单片机26,单片机26根据拍摄前方画面调节行进速度和方向,且单片机26输出信号传输至中央控制系统和遥控器42,便于现场指挥中心调度人员观察前方情况。
67.在距离较近无需中央控制系统建图或者路况过于复杂的情况下,救援人员可使用遥控器42直接操控本消防救援运输机器人,同时可控制机器人携带的各种设备。
68.本发明通过安置舱的作用,创造了隔热、阻燃、无毒的环境,防止给被救人员人身造成二次伤害;用于在大型火灾现场的情况下帮助救援人员运输伤者,特别是受伤严重、被困无法移动和残疾人等弱势群体,防止受到有毒烟气、高温、明火的伤害,以及避免因为浓烟、明火的阻碍造成无法到达安全出口。
69.本实施例提供的方法是用于执行上述各结构实施例的,具体流程和详细内容请参照上述实施例,此处不再赘述。
70.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1