人工智能消防机器人的制作方法
本发明属于灭火装置,具体涉及一种多用途人工智能消防机器人,本人工智能消防机器人可应用于各类灭火场景中。
背景技术:
1、近年来,在消防工作中,灭火弹已成为一种常用的消防设备,灭火弹内装载有大量的超细干粉灭火剂,遇高温时自动引爆,尤其适用于水源无法到达的高层建筑灭火、危险性较大的森林灭火以及图书馆、博物馆等需要特殊保护的火灾场景,灭火弹不仅使用方便,且对周围的人员和物品较为安全,因此其应用领域日益广泛。
2、早期的灭火弹发射多为手投式发射,但由于其安全性较差、投掷准确率较低,目前已被投弹消防机器人所替代。投弹消防机器人大多采用两种方式进行投弹,一种是车载灭火弹发射器,另一种是无人机携带的灭火弹发射器,无人机投弹是利用灭火弹自身的重力从高空落于火场,因此只能适用于开阔区域(火灾上方无遮挡)的火场,其使用受到了一定的限制;而车载灭火弹发射器大多都是固定安装在消防车上,其发射装置自身无法进行移动,当发射位置与着火点具有角度差时,只能通过移动车辆来调节发射位置和角度。
3、同样,作为一种非常常用的消防设备,喷淋式灭火装置是通过喷嘴将灭火液喷射到火点以熄灭火焰。传统的手持式喷淋灭火器由于其钢瓶容量过小而只能用于微型火点,对于较大火点目前使用最多的是车载喷淋式灭火器,然而,由于车载喷淋式灭火器大多都是固定安装在消防车上,其喷射装置自身无法进行移动,当喷射头位置与着火点具有角度差时,也只能通过移动车辆来调节喷射头位置和喷射角度。
4、上述车载灭火器采用的固定安装方式在实际灭火作业过程中不仅会浪费大量的灭火时间,而且由于消防车体积较大,在许多狭窄空间中移动车辆非常困难,从而大大降低了灭火效率,延误了最佳灭火时机,同时也限制了此类灭火器的使用。
技术实现思路
1、为了克服现有车载灭火装置的缺陷和不足,本发明人结合消防场景的实际应用需求,经过反复设计和调试,开发出了一种多用途人工智能消防机器人。本装置适用面广,适用于绝大多数火灾场景,且本装置中的灭火弹弹射系统和喷淋灭火系统自身均为可移动式安装,进行弹射(喷射)位置和角度调节时无需移动机器人,操作更加便捷,节省了操作时间。另外,本发明人工智能消防机器人可综合影像、温度、烟雾、空气、距离等数据进行智能火情分析,判断火点大小,并根据实际的火点大小自主切换灭火模式,针对较大火点启动灭火弹弹射系统,针对较小火点启动喷淋灭火系统,从而实现了精准化灭火,在节约资源的同时提升了灭火效率。
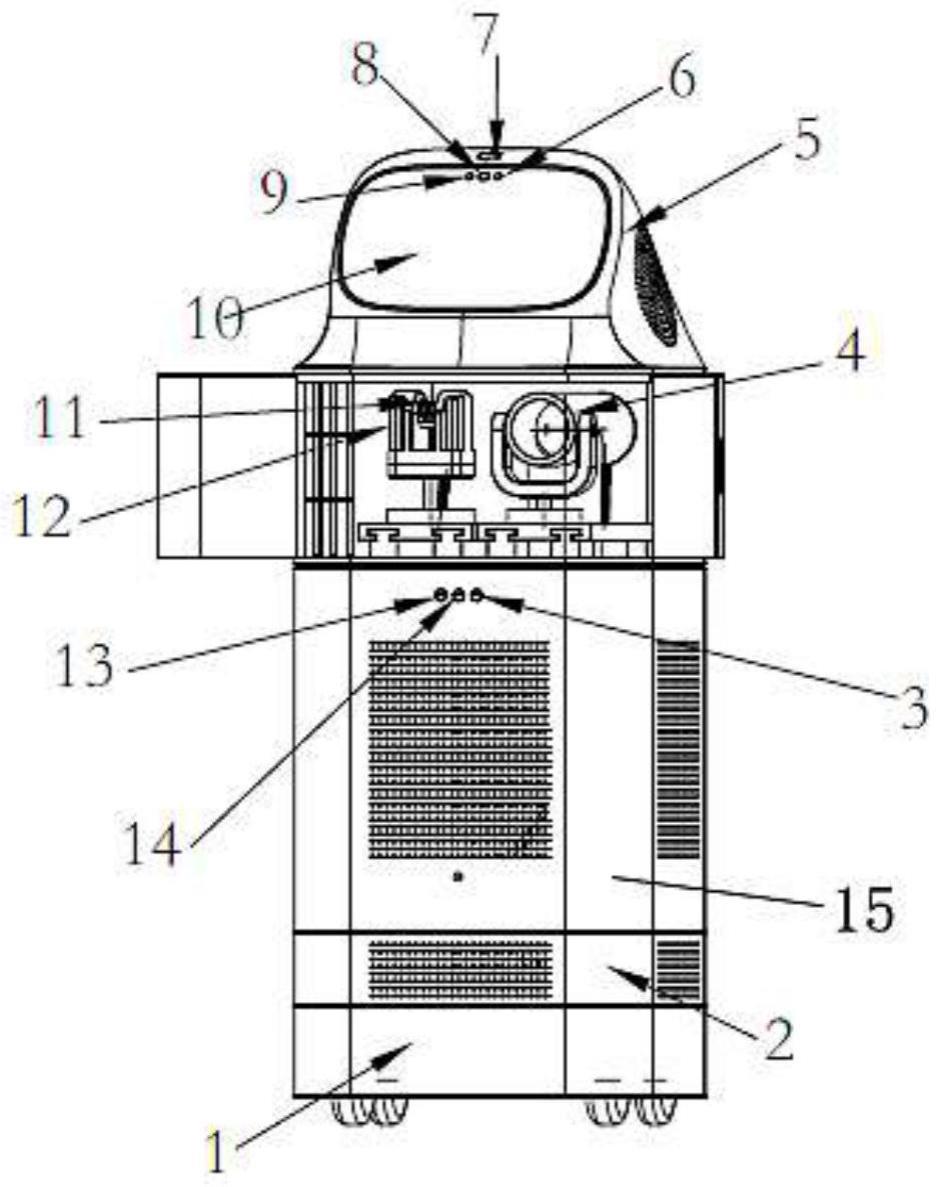
2、具体而言,本发明提供了一种人工智能消防机器人,本发明人工智能消防机器人由行走机构1、智能充电系统2、烟雾传感器3、灭火弹弹射系统4、ai智能控制系统5、智能语音识别系统6、智能网络系统7、智能影像分析系统8、距离传感器9、显示屏10、火焰传感器11、喷淋灭火系统12、空气传感器13、温度传感器14和主机箱15组成;其中:
3、行走机构1安装在主机箱15底部;
4、智能充电系统2安装在主机箱15内部下方;
5、火焰传感器11、灭火弹弹射系统4、喷淋灭火系统12安装在主机箱15内部上方;
6、烟雾传感器3、空气传感器13、温度传感器14安装在主机箱15前侧面板上部;
7、显示屏10安装在主机箱15上方前侧,ai智能控制系统5安装在显示屏10的后方;
8、智能语音识别系统6、智能网络系统7、智能影像分析系统8、距离传感器9安装在显示屏10的上方;
9、行走机构1、智能充电系统2、烟雾传感器3、灭火弹弹射系统4、智能语音识别系统6、智能网络系统7、智能影像分析系统8、距离传感器9、显示屏10、火焰传感器11、喷淋灭火系统12、空气传感器13、温度传感器14均通过传输线与ai智能控制系统5相连接。
10、进一步地,根据本发明的一些实施例,本发明人工智能消防机器人中:
11、ai智能控制系统5收集烟雾传感器3、火焰传感器11、空气传感器13、温度传感器14、距离传感器9发送的数据,并对获得的数据进行自主学习和应用场景识别,然后在识别确定的具体场景下进行数据分析,选择应对策略,实现防范火灾或扑灭火灾的功能;
12、ai智能控制系统5与智能网络系统7相连接,ai智能控制系统5将运行过程中产生的所有系统信息与系统指令发送至智能网络系统7,并接收和执行智能网络系统7发送的外部控制指令;
13、智能网络系统7发送的外部控制指令可在智能app上同步显示。
14、进一步地,根据本发明的一些实施例,本发明人工智能消防机器人中:
15、智能网络系统7与智能插座、分布式智能传感器、智能门锁相连接,用于实时监控作业区域的电路、电器、空气、烟雾、温度状况,自主分析并识别火灾隐患区,并对识别确定的火灾隐患区实施自主断电、断气。
16、进一步地,根据本发明的一些实施例,本发明人工智能消防机器人中:
17、烟雾传感器3用于收集空气中的烟雾信号,并判断是否存在烟雾异常状况;
18、距离传感器9用于测量火焰与距离传感器9之间的距离,并分析二者之间是否存在障碍物;
19、空气传感器13用于监控空气中的一氧化碳、二氧化碳浓度变化,并判断有无火情发生;
20、温度传感器14用于收集周围环境的温度数据,并判断有无火情发生;
21、显示屏10用于显示ai智能控制系统5中的各项数据,并对ai智能控制系统5进行功能设定;
22、行走机构1用于在ai智能控制系统5的指令下按照其规划的行走路线进行移动,并根据ai智能控制系统5的提示自动避障;
23、智能充电系统2用于在电量不足时根据ai智能控制系统5的提示进行自主智能充电;
24、智能语音识别系统6用于识别外部语音指令,并将该指令发送给ai智能控制系统5予以实施。
25、进一步地,根据本发明的一些实施例,本发明人工智能消防机器人中:
26、火焰传感器11由远红外火焰探头、比较器、发射管、接收管和输出端组成,用于测定火焰的强度与大小并识别火焰根部位置。
27、进一步地,根据本发明的一些实施例,本发明人工智能消防机器人中:
28、智能影像分析系统8由智能摄像头、红外测距仪、图像识别器和计算单元组成,用于测定火焰面积。
29、进一步地,根据本发明的一些实施例,本发明人工智能消防机器人中:
30、灭火弹弹射系统4由上弹弹簧16、第一滑动底座17、发射筒18、复位弹簧19、发射活塞20、直线电机21、灭火弹22、高压空气管23、第一电磁阀24、高压储气罐25和灭火弹弹仓26组成;其中:
31、灭火弹22置于灭火弹弹仓26中,上弹弹簧16设置在灭火弹弹仓26底部,用于向发射筒18推送灭火弹22;
32、第一滑动底座17可旋转式安装在主机箱15的上部,其上方设置有滑轨,发射筒18可在滑轨上自由滑动;
33、发射筒18与灭火弹弹仓26为一体式设计,复位弹簧19设置在发射筒18后部,用于灭火弹发射后发射活塞20的复位;
34、发射活塞20设置于发射筒18后端,位于复位弹簧19的后方,发射活塞20在高压空气的推动下向发射筒18前部运动,实现灭火弹22的发射;
35、高压空气管23连接在发射筒18末端,用于提供高压空气推动发射活塞20向发射筒18前部运动;
36、高压储气罐25用于储存高压空气,其开口端连接有第一电磁阀24,第一电磁阀24用于控制高压储气罐25的开启与关闭。
37、进一步地,上述人工智能消防机器人中:
38、直线电机21安装在发射筒18后部下侧,其下端与滑轨滑动连接,直线电机21用于调整发射筒18的发射角度。
39、进一步地,根据本发明的一些实施例,本发明人工智能消防机器人中:
40、喷淋灭火系统12由第二滑动底座27、灭火钢瓶28、第二电磁阀29、高压喷淋管30、电机31、高速喷嘴32和喷射装置架33组成;其中:
41、第二滑动底座27可旋转式安装在主机箱15的上部,其上方设置有滑轨,喷射装置架33可在滑轨上自由滑动;
42、电机31和高速喷嘴32安装在喷射装置架33上,电机31用于调整高速喷嘴32的喷射角度;
43、高速喷嘴32的末端与高压喷淋管30的一端相连接,高压喷淋管30的另一端连接在第二电磁阀29上;
44、灭火钢瓶28用于储存高压灭火液,其开口端连接有第二电磁阀29,第二电磁阀29用于控制灭火钢瓶28的开启与关闭。
45、本发明人工智能消防机器人主要具有以下优点:
46、(1)本人工智能消防机器人适用面广,适用于绝大多数火灾场景。
47、(2)本人工智能消防机器人中的灭火弹弹射系统和喷淋灭火系统自身均为可移动式安装,进行弹射(喷射)位置和角度调节时无需移动机器人,操作更加便捷。
48、(3)本人工智能消防机器人可综合影像、温度、烟雾、空气、距离等数据进行智能火情分析,判断火点大小,并根据实际的火点大小自主切换灭火模式,针对较大火点启动灭火弹弹射系统,针对较小火点启动喷淋灭火系统,从而实现了精准化灭火,在节约资源的同时提升了灭火效率。
49、(4)本人工智能消防机器人中的灭火弹弹射系统发射精度高、灭火效果非常理想,且该弹射系统可自动装填灭火弹,节省了操作时间。
- 还没有人留言评论。精彩留言会获得点赞!