一种消防巡检灭火机器人及其工作方法与流程
1.本发明涉及消防灭火机器人领域,具体地说是涉及一种自带卷水带并能够进行收放的消防巡检灭火机器人,以及该机器人的工作方法。
背景技术:
2.随着科技的不断发展,消防灭火机器人越来越多的代替人工进行灭火。然而,现有消防灭火机器人大多都是在发现火情后,进入到相应位置,进行喷射干粉或喷水灭火。对一些易发生火情的电厂或其他场所,无法实现巡检功能。而且,现有消防灭火机器人在发现火情后,需要通过进水口外连消防水带,操作复杂。如果消防灭火机器人距离消防栓较远,还需要配合出动消防车。再者,消防水带在铺设的时候,需要边放卷,边铺设,耗费时间较多。
技术实现要素:
3.基于上述技术问题,本发明提出一种消防巡检灭火机器人,以及该消防巡检灭火机器人的工作方法。
4.本发明所采用的技术解决方案是:
5.一种消防巡检灭火机器人,包括移动底盘组件、消防巡检组件和用于收放水带的卷水带组件;
6.所述移动底盘组件包括底盘本体,在底盘本体的两侧设置有履带模块,在底盘本体上设置有用于驱动履带模块行进和转向的动力模块;
7.所述消防巡检组件和卷水带组件均安装在底盘本体上,其中卷水带组件处于底盘本体的后部;
8.所述消防巡检组件包括激光雷达、摄像头和消防水炮,激光雷达、摄像头和消防水炮安装在底盘本体的前部;
9.所述卷水带组件包括壳体,在壳体朝向底盘本体尾部的方向设置有水带卷放口,在壳体的内部设置有收卷管,收卷管的内部中空,在收卷管的外壁上缠绕水带;在收卷管的内部中心轴向设置有第一水管段,第一水管段的一端封闭,第一水管段的另一端与弯头相连通,弯头安装在壳体的一侧壁上;所述弯头通过第二水管段与消防水炮相连通;在第一水管段的侧壁上还设置有连接管头,在收卷管的侧壁上对应连接管头处还设置有缺口,水带的一端从缺口中穿过,并与连接管头相连接;
10.在壳体的水带卷放口处设置有水带主动释放轴,水带主动释放轴和收卷管均与驱动机构传动连接;在水带主动释放轴的上方平行设置有从动轴,在水带主动释放轴和从动轴之间形成用于夹持水带的间隙,水带的另一端从间隙中穿过;所述从动轴还与带动其上下移动,进而调整间隙距离的间隙调整机构连接。
11.优选的,所述间隙调整机构包括滑轨,滑轨安装在从动轴的两端,呈竖向布置,在从动轴的端部设置有与滑轨相适配的滑块;从动轴的端部还与气缸或液压缸的缸杆连接。
12.优选的,所述驱动机构包括伺服电机、减速机和离合器,伺服电机通过减速机与离
合器传动连接,离合器的一端通过第一传动链条或第一传动皮带与收卷管的一端传动连接,离合器的另一端通过第二传动链条或第二传动皮带与水带主动释放轴传动连接。
13.优选的,在壳体的侧壁上还设置有手摇驱动轮,手摇驱动轮通过第三传动链条或第三传动皮带与收卷管的另一端传动连接,手摇驱动轮与驱动管相连接,在壳体的侧壁对应位置处还设置有通孔,驱动管从通孔中穿过,驱动管的中心设置有与摇把相适配的插接孔。
14.优选的,在壳体的侧壁外表面设置有摇把固定件,所述摇把固定件包括便于摇把一端插入的圆柱套管,圆柱套管水平布置,在圆柱套管的斜上方位置处设置有便于摇把另一端卡入的u型卡槽。
15.优选的,在驱动管上还配置有锁止件,在驱动管的侧壁上设置有螺孔,在锁止件上设置有插入螺孔中的螺柱,在螺柱上设置有外螺纹。
16.优选的,在收卷管的两端均设置有圆形挡盘,分别为第一圆形挡盘和第二圆形挡盘,在第一圆形挡盘的外侧设置有第一传动轮,第一传动轮与第一传动链条或第一传动皮带相连接,在第一圆形挡盘的内侧设置有法兰盘,法兰盘与第一水管段的一端固定连接,第一水管段的另一端与第二圆形挡盘固定连接,在第二圆形挡盘的外侧设置有第二传动轮;所述第一水管段通过密封连接管与弯头相连通。
17.优选的,所述消防巡检组件还包括云台、照明灯、声光报警灯和超声波避障传感器,在云台上设置有火焰追踪组件,火焰追踪组件包括双目视觉摄像机和红外追踪仪,云台安装在底盘本体上,且处于消防水炮和卷水带组件之间的位置处;
18.所述照明灯和声光报警灯均设置两个,且安装于底盘本体的前部两侧;所述超声波避障传感器共设置三个,其中一个安装在底盘本体的头部中间位置处,另两个分别安装在卷水带组件的壳体尾部两侧;
19.在底盘本体上还设置有主控装置,所述动力模块、激光雷达、消防水炮、驱动机构、间隙调整机构、火焰追踪组件、照明灯、声光报警灯和超声波避障传感器均与主控装置连接。
20.优选的,该消防巡检灭火机器人还包括增压装置,所述增压装置包括增压泵,增压泵的进口端通过供水带与消防栓连接,增压泵的出口端与水带可拆卸连接。
21.上述消防巡检灭火机器人的工作方法,包括以下步骤:
22.(1)消防巡检灭火机器人进入工作场地后,先通过激光雷达进行工作场地的建图,并设定巡检路线,进行自主导航巡检;在巡检过程中,通过超声波避障传感器进行自动避障;
23.(2)当通过摄像头和/或火焰追踪组件发现火情后,主控装置控制声光报警灯进行报警,并控制间隙调整机构和驱动机构动作;
24.(3)间隙调整机构中的气缸或液压缸的缸杆伸出,推动从动轴沿滑轨向下移动,使从动轴与水带主动释放轴之间夹紧水带;
25.(4)驱动机构中伺服电机依次通过减速机、离合器、第二传动链条或第二传动皮带带动水带主动释放轴转动,水带在水带主动释放轴的摩擦驱动作用下进行释放;
26.(5)释放完成后,间隙调整机构中的气缸或液压缸的缸杆回缩,带动从动轴沿滑轨向上移动,使从动轴与水带主动释放轴之间的间隙大于水带充水后的直径;
27.(6)将水带与增压装置的出口端连接,启动增压泵,消防栓中的水通过增压泵增压后,依次通过水带、第一水管段、第二水管段传输至消防水炮,并经消防水炮喷射灭火;
28.(7)灭火完成后,关闭增压泵,将水带从增压泵的出口端拆卸下来,然后驱动机构中的伺服电机再依次通过减速机、离合器、第一传动链条或第一传动皮带带动收卷管转动,将水带缠绕在收卷管上。
29.本发明的有益技术效果是:
30.本发明消防巡检灭火机器人可在电厂等易发生火情的场所按设定路线进行自主巡检,并具有自动避障,摄像及自动探测火情,以及发现火情后及时进行声光报警等功能;而且机器人后部携带有卷水带组件,可在发现火情后,第一时间控制与消防水炮连接的水带释放,进而方便与增压装置快速连接,极大缩短消防灭火的前期准备时间,从而可在火情初发阶段,即能实现迅速喷水灭火,有效保障场所的消防安全。
附图说明
31.下面结合附图与具体实施方式对本发明作进一步说明:
32.图1为本发明消防巡检灭火机器人的外部结构示意图;
33.图2为图1的前侧另一角度视图;
34.图3为图1的后侧一角度视图;
35.图4为图1的后侧另一角度视图;
36.图5为本发明中卷水带组件的外部结构示意图;
37.图6为图5的另一角度视图;
38.图7为图5的后侧视图;
39.图8为本发明中卷水带组件省去中间部分壳体后的结构原理示意图;
40.图9为图8的后侧另一角度视图;
41.图10为图8的前侧一角度视图;
42.图11为图8的前侧另一角度视图;
43.图12为图8的后侧正向视图;
44.图13为本发明中卷水带组件省去全部壳体后的结构原理示意图;
45.图14为图13的另一角度视图;
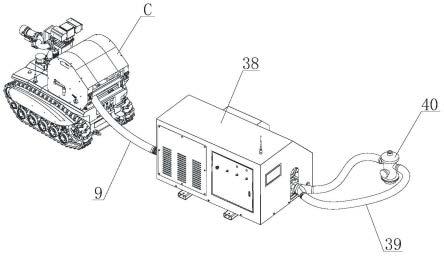
46.图15为本发明与增压装置连接后的整体结构示意图;
47.图16为图15的另一角度视图。
具体实施方式
48.结合附图,一种消防巡检灭火机器人,包括移动底盘组件a、消防巡检组件b和用于收放水带的卷水带组件c。所述移动底盘组件a包括底盘本体1,在底盘本体1的两侧设置有履带模块2,在底盘本体1上设置有用于驱动履带模块2行进和转向的动力模块。所述消防巡检组件b和卷水带组件c均安装在底盘本体1上,其中卷水带组件c处于底盘本体1的后部。所述消防巡检组件a包括激光雷达3、摄像头4和消防水炮5,激光雷达3、摄像头4和消防水炮5安装在底盘本体1的前部。
49.所述卷水带组件c包括壳体6,壳体6呈蜗壳状,在壳体6朝向底盘本体1尾部的方向
设置有水带卷放口7。在壳体6的内部设置有收卷管8,收卷管8的内部中空,在收卷管8的外壁上缠绕水带9。在收卷管8的内部中心轴向设置有第一水管段10,第一水管段10的一端封闭,第一水管段10的另一端与弯头11相连通,弯头11安装在壳体6的一侧壁上。所述弯头11通过第二水管段12与消防水炮5相连通,第二水管段12的部分段体沿壳体的侧壁伸展,其余部分段体沿底盘本体伸展布置。在第一水管段10的侧壁上还设置有连接管头13,在收卷管8的侧壁上对应连接管头处还设置有缺口26,水带9的一端从缺口26中穿过,并与连接管头13相连接。在壳体6的水带卷放口处设置有水带主动释放轴14,水带主动释放轴14和收卷管8均与驱动机构传动连接。在水带主动释放轴14的上方平行设置有从动轴15,在水带主动释放轴14和从动轴15之间形成用于夹持水带的间隙16,水带9的另一端从间隙16中穿过。所述从动轴15还与带动其上下移动,进而调整间隙距离的间隙调整机构连接。
50.作为对本发明的进一步设计,所述间隙调整机构包括滑轨17,滑轨17安装在从动轴15的两端,呈竖向布置,在从动轴的端部设置有与滑轨相适配的滑块,从动轴的端部比如说滑块还可进一步与气缸42的缸杆连接。这样从动轴15能够相对于滑块等自由转动,且从动轴的竖向高度可通过气缸进行上下调整,即通过气缸的缸杆带动从动轴两端的滑块沿滑轨17上下移动。
51.进一步的,所述驱动机构包括伺服电机18、减速机19和离合器20,伺服电机18通过减速机19与离合器20的中心传动连接,离合器可采用能够左右单独吸合的双离合结构,离合器20的一侧通过第一传动链条21与收卷管8的一端传动连接,离合器20的另一侧通过第二传动链条43与水带主动释放轴14传动连接。
52.更进一步的,在收卷管8的两端均设置有圆形挡盘,分别为第一圆形挡盘22和第二圆形挡盘23,在第一圆形挡盘22的外侧设置有第一传动轮24,第一传动轮24与第一传动链条21相连接。在第一圆形挡盘22的内侧设置有法兰盘,法兰盘与第一水管段10的一端固定连接,第一水管段10的另一端与第二圆形挡盘23固定连接,在第二圆形挡盘的外侧设置有第二传动轮25。所述第一水管段10通过密封连接管与弯头11相连通。在水带释放或收卷过程中,第一水管段10随着收卷管8同步转动。密封连接管的一端与第一水管段10密封连接,但其与弯头11均不随第一水管段10转动,即密封连接管与第一水管段10采用动密封结构连接。
53.在水带主动释放轴14的端部设置有第三传动轮34,在第三传动轮34和离合器之间还设置有中间过渡轮35,第二传动链条43共设置两段,其中第一段传动链条的一端与离合器上的齿轮连接,另一端与中间过渡轮35的其中一个轮体连接,第二段传动链条的一端与中间过渡轮35的另外一个轮体连接,另一端与第三传动轮34传动连接。上述结构设置方式可提升第二传动链条等运转的稳定性,确保水带主动释放轴14平稳转动。当然,也可省去中间过渡轮35,离合器通过第二传动链条43直接带动第三传动轮34运转,进而带动水带主动释放轴14转动。
54.进一步的,在壳体6的侧壁上还设置有手摇驱动轮27,手摇驱动轮27通过第三传动链条28与收卷管8的另一端传动连接,即通过第三传动链条28与第二传动轮25相连接。手摇驱动轮27与驱动管29相连接,在壳体6的侧壁对应位置处还设置有通孔,驱动管从通孔中穿过,驱动管的中心设置有与摇把30相适配的插接孔31。通过手摇驱动轮27与摇把30等的设置,可手动驱动收卷管8转动,实现水带在手动控制下的收卷。
55.进一步的,在壳体6的侧壁外表面设置有摇把固定件32,所述摇把固定件包括便于摇把30一端插入的圆柱套管3201,圆柱套管3201水平布置,在圆柱套管的斜上方位置处设置有便于摇把30另一端卡入的u型卡槽3202。这样可直接将摇把30固定在壳体6的侧壁上。
56.更进一步的,在驱动管29上还配置有锁止件33,在驱动管的侧壁上设置有螺孔,在锁止件上设置有插入螺孔中的螺柱3301,在螺柱上设置有外螺纹。通过锁止件33的设置,可在必要情况下锁住收卷管8,当然锁止件33也可调节收卷管8转动的灵活度,起到阻尼的作用。
57.作为对本发明的进一步设计,所述消防巡检组件b还包括云台34、照明灯35、声光报警灯36和超声波避障传感器37。在云台34上设置有火焰追踪组件,火焰追踪组件包括双目视觉摄像机41和红外追踪仪,可实现火焰的有无和位置识别。云台34安装在底盘本体1上,且处于消防水炮5和卷水带组件c之间的位置处。所述照明灯35和声光报警灯36均设置两个,且安装于底盘本体的前部两侧。照明灯35起到照明的作用,声光报警灯36起到声光报警的作用,可在发现火情后及时发出声光警报。所述超声波避障传感器37共设置三个,其中一个安装在底盘本体1的头部中间位置处,另两个分别安装在卷水带组件的壳体6尾部两侧。超声波避障传感器37可用于机器人的自动避障等。在底盘本体上还设置有主控装置,所述动力模块、激光雷达3、消防水炮5、驱动机构、间隙调整机构、火焰追踪组件、照明灯35、声光报警灯36和超声波避障传感器37均与主控装置连接。
58.更进一步的,如图15-16所示,该消防巡检灭火机器人还包括增压装置38,所述增压装置38包括增压泵,增压泵的进口端通过供水带39与消防栓40连接,增压泵的出口端与水带9可拆卸连接。通过增压装置的设置,可起到增大消防水压的作用,提高喷水灭火效果,而且使得与水带的连接更加便捷。
59.本发明消防巡检灭火机器人可在电厂等易发生火情的场所按设定路线进行自主巡检,并具有自动避障,摄像及自动探测火情,以及发现火情后及时进行声光报警等功能。而且机器人后部携带有卷水带组件,可在发现火情后,第一时间控制与消防水炮连接的水带释放,进而方便与增压泵快速连接,极大缩短消防灭火的前期准备时间,从而可在火情初发阶段,即能实现迅速喷水灭火,有效保障场所的消防安全。
60.本发明还提供一种消防巡检灭火机器人的工作方法,包括以下步骤:
61.(1)消防巡检灭火机器人进入工作场地后,先通过激光雷达3进行工作场地的建图,并设定巡检路线,进行自主导航巡检。在巡检过程中,通过超声波避障传感器37进行自动避障。
62.(2)当通过摄像头4和/或火焰追踪组件等发现火情后,主控装置控制声光报警灯36进行报警,并控制间隙调整机构和驱动机构动作。
63.(3)间隙调整机构中的气缸42的缸杆伸出,推动从动轴15沿滑轨17向下移动,使从动轴15与水带主动释放轴14之间夹紧水带,从而提升水带主动释放轴14与水带之间的摩擦力,可在水带主动释放轴14转动时,向外牵引出水带9。
64.(4)控制离合器20的一侧吸合,驱动机构中伺服电机18依次通过减速机19、离合器20、第二传动链条43带动水带主动释放轴14转动,水带在水带主动释放轴的摩擦驱动作用下进行释放。
65.(5)水带释放完成后,间隙调整机构中的气缸42的缸杆回缩,带动从动轴15沿滑轨
17向上移动,使从动轴15与水带主动释放轴14之间的间隙大于水带充水后的直径,避免对水带9的充水造成影响。
66.(6)将水带9的末端与增压装置的出口端连接,启动增压装置,消防栓40中的水通过增压装置38增压后,依次通过水带9、第一水管段10、第二水管段12传输至消防水炮5,并经消防水炮5喷射灭火。
67.(7)灭火完成后,关闭增压装置,将水带9的末端从增压装置的出口端拆卸下来,然后控制离合器20的另一侧吸合,驱动机构中的伺服电机18再依次通过减速机19、离合器20、第一传动链条21带动收卷管8转动,将水带9缠绕在收卷管上。
68.上述方法中,在进行水带9的收卷时,也可通过将摇把30插入插接孔31中,然后手动转动驱动,进而通过第三传动链条28驱动收卷管8转动。同时,由于手摇驱动轮27与驱动管29的设置,可进一步与锁止件33配合,在必要情况下锁住收卷管8,使其不转动。当然锁止件33也可根据需要调节收卷管8转动的灵活度,起到阻尼的作用。
69.上述方式中未述及的部分采取或借鉴已有技术即可实现。
70.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1