一种应用于机器人的声源定位自动跟踪灭火系统的制作方法
1.本技术涉及机器人的领域,尤其是涉及一种应用于机器人的声源定位自动跟踪灭火系统。
背景技术:
2.机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动即能力范围。
3.现有技术中,如配电室等不便于工作人员经常出入的危险场所中,由于工作人员不能自由进入上述场所,故需要预先安装有各种监测设备,以监测电流、灰尘浓度、各种气体浓度或压力等参数,进而根据这些预测场所中火灾、爆炸等危险情况的发生。当危险情况发生时,工作人员接收到报警信息才会去现场救援。
4.在这一过程中,工作人员赶往现场需要一段时间。在这段时间内,火势可能迅速增大,容易造成更大的经济损失。
技术实现要素:
5.为了便于实现在危险场所中及时发现异常情况并做出处理,本技术提供了一种应用于机器人的声源定位自动跟踪灭火系统。
6.本技术提供的一种应用于机器人的声源定位自动跟踪灭火系统采用如下的技术方案:
7.一种应用于机器人的声源定位自动跟踪灭火系统,包括声音采集模块、声音处理模块、控制模块、火灾检测模块、红外视觉模块和灭火装置;
8.所述声音采集模块设置有多个;
9.所述声音处理模块连接多个声音采集模块;
10.所述控制模块连接声音处理模块、火灾检测模块和红外视觉模块;
11.所述灭火装置连接控制模块。
12.通过采用上述技术方案,声音采集模块能够采集声源发出的异音,声音处理模块能够根据多个异音计算声源的位置,使得控制模块能够控制机器人向声源移动,并通过火灾检测模块检测声源处是否发生火灾,并通过红外视觉模块确定火灾的具体位置,使得控制模块能够控制灭火装置对火灾区域进行精准灭火。其中,声音处理模块、控制模块、红外视觉模块都需要加载一定的算法或程序,因此,本技术的应用于机器人的声源定位自动跟踪灭火系统能够为及时解决危险场所中的异常情况提供硬件基础,以便于实现在危险场所中及时发现异常情况并做出处理。
13.可选的,所述声音采集模块设置有三个,分别设置于所述机器人的不同位置。
14.通过采用上述技术方案,能够以最少的声音采集模块数量确定声源位置,进而降低解决问题所需的成本。
15.可选的,所述火灾检测模块至少包括紫外传感器。
16.通过采用上述技术方案,能够基于火焰中的紫外光对火焰进行检测。
17.可选的,所述火灾检测模块还包括声音比较单元,所述声音比较单元连接多个声音采集模块;
18.所述控制模块分别连接紫外传感器和声音比较单元。
19.通过采用上述技术方案,声音比较单元能够将声音采集模块采集的异音与预设的异音数据库进行比对,根据比对结果能够对异音产生的原因作出判断,进而确定是否会产生火灾。为了实现上述功能,声音比较单元也需要加载一定的算法或程序,因此,设置声音比较单元能够便于在危险场所中及时发现异常情况并做出处理功能的实现。
20.可选的,所述声音比较单元连接有声音存储单元。
21.通过采用上述技术方案,声音存储单元能够存储异音数据库,为将异音与异音数据库进行对比提供便利。
22.可选的,所述红外视觉模块包括处理单元和两台红外热像仪,所述处理单元分别连接两台红外热像仪。
23.可选的,所述灭火装置包括驱动组件、旋转组件和用于喷射灭火剂的灭火组件;
24.所述驱动组件、旋转组件分别连接控制模块。
25.通过采用上述技术方案,控制模块根据红外视觉模块计算得到的火灾位置,能够控制驱动组件调整灭火组件的高度,使得灭火组件调整到火灾所在的高度,同时能够控制旋转组件调整灭火组件的喷头的朝向,使得灭火组件的喷头朝向火灾发生点,进而进行精准灭火。
26.可选的,所述灭火装置固定设置于所述机器人上。
27.综上所述,本技术包括以下至少一种有益技术效果:
28.声音采集模块能够采集声源发出的异音,声音处理模块能够根据多个异音计算声源的位置,使得控制模块能够控制机器人向声源移动,并通过火灾检测模块检测声源处是否发生火灾,并通过红外视觉模块确定火灾的具体位置,使得控制模块能够控制灭火装置对火灾区域进行精准灭火。其中,声音处理模块、控制模块、红外视觉模块都需要加载一定的算法或程序,因此,本技术的应用于机器人的声源定位自动跟踪灭火系统能够为及时解决危险场所中的异常情况提供硬件基础,以便于实现在危险场所中及时发现异常情况并做出处理。
附图说明
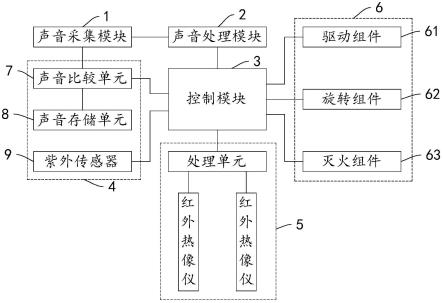
29.图1是本技术实施例的应用于机器人的声源定位自动跟踪灭火系统的系统示意图。
30.附图标记说明:1、声音采集模块;2、声音处理模块;3、控制模块;4、火灾检测模块;5、红外视觉模块;6、灭火装置;61、驱动组件;62、旋转组件;63、灭火组件;7、声音比较单元;8、声音存储单元;9、紫外传感器。
具体实施方式
31.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图1及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,并
不用于限定本技术。
32.本技术实施例公开一种应用于机器人的声源定位自动跟踪灭火系统。
33.参照图1,应用于机器人的声源定位自动跟踪灭火系统包括声音采集模块1、声音处理模块2、控制模块3、火灾检测模块4、红外视觉模块5和灭火装置6,能够便于实现在危险场所中及时发现异常情况并做出处理。
34.具体的,声音采集模块1设置有多个,每个声音采集模块1均用于采集声源发出的异音,并输出声音信息。优选的,声音采集模块1为麦克风。在本技术中,麦克风设置有三个,分别设置于机器人身上的不同位置,以便于低成本地确定声源的位置。可以了解的是,麦克风也可以设置于危险场所中。但相比之下,设置于机器人上能够简化计算声源位置的计算量。
35.声音处理模块2连接多个声音采集模块1,用于根据多个声音信息计算得到声源的位置,输出第一位置信号。其中,根据多个声音信息计算声源的位置可以通过toda技术和aoa技术实现。
36.在本技术实施例中,声音信息包括各个麦克风接收到异音的时间信息,以此通过toda技术进行计算。由于toda技术属于相关领域技术人员的常规技术手段,因此,此处不再做过多介绍。声音处理模块2优选为微型处理芯片,可以是单片机、mcu或fpga,其能够加载用于实现根据多个声音信息计算得到声源位置的算法或程序。
37.火灾检测模块4用于检测声源处是否发生火灾,并用于在检测到生远处发生火灾时输出报警信号。
38.火灾检测模块4至少包括紫外传感器9。紫外传感器9用于检测声源处是否发生火灾。由于火焰中存在紫外光,因此,通过紫外传感器9能够检测声源处是否发生火灾,并在检测到发生火灾时输出报警信号。
39.当然,检测火灾的发生不仅能够通过紫外传感器9进行检测,还能够通过声源处所产生异音的类型进行判断。
40.具体来说,火灾检测模块4还包括声音比较单元7。
41.声音比较单元7连接多个声音采集模块1,用于将接收的声音信息与预存的异音数据库中的异音进行比对,并在声音信息与异音数据库中的异音相似度达到预设相似度时输出报警信号。反之,在声音信息与异音数据库中的异音相似度未达到预设相似度时,则不输出报警信号。
42.可以了解的是,异音数据库中记载了多种异音、每种异音所对应的故障以及每种故障引发的事故。其中,大多都为火灾。由于各种异音的频率和波形各不相同,因此,可以通过对比异音的频率和波形对采集到的异音进行识别。当然,受到各种因素的影响,采集到的异音也可能与异音数据库中的某一种异音存在细微的差异,为此,在将接收到的异音与异音数据库中的异音对比时,若声音信息与异音数据库中的异音相似度达到预设相似度,则输出报警信号,即说明声源处发生了火灾。预设相似度优选为80%。对比声音波形的方法为相关领域技术人员的常规技术手段,故此处不再进行详细说明。
43.当然,采集到的异音也并不一定属于异音数据库中记载的异音类型。对于上述情况,声音比较单元7输出异常信号并上传至远程监控端,以通知工作人员及时查看情况。
44.优选的,声音比较单元7为微型处理芯片,可以是单片机、mcu或fpga,其能够加载
用于对比声音频率和波形的算法或程序。
45.其中,异音数据库可以是预存于声音比较单元7中的,也可以是存储于其他存储模块中的。在本技术实施例中,声音比较单元7还连接有声音存储单元8。声音存储单元8用于存储异音数据库。声音存储单元8优选为存储器等具有存储空间及存储功能的设备。
46.本技术实施例同时采用紫外传感器9、声音采集模块1、声音比较单元7和声音存储单元8能够为实现对火灾的检测提供硬件基础,同时在配合一定的算法和程序后,能够更加精确地检测声源处是否有火灾发生。
47.在一些其他的实施例中,对于火灾的检测,选用紫外传感器9或由声音采集模块1、声音比较单元7和声音存储单元8配合的检测方式其中的一种即可。
48.红外视觉模块5用于确定火源的位置,输出第二位置信号。
49.红外视觉模块5包括处理单元和两台红外热像仪。红外热像仪用于采集火源图像,输出火源图像。当然,在一些实施例中,两台红外热像仪也可以用双目红外热像仪代替。
50.处理单元分别连接两台红外热像仪,用于根据三角测量原理和火焰特征点在两台红外热像仪中的视差测定火灾的位置,输出第二位置信号。在本技术中,处理单元为处理芯片,可以是单片机、mcu或fpga,其能够加载一定的算法或程序以实现上述功能。
51.控制模块3连接声音处理模块2、紫外传感器9、声音比较单元7、红外视觉模块5,用于根据第一位置信号控制机器人向声源移动,还用于在接收到任意一个报警信号并且接收到第二位置信号时,输出灭火信号。
52.当控制模块3接收到第一位置信号时,控制模块3能够控制机器人中的移动机构,以使得机器人向声源方向移动,进而便于进一步地判断声源处的异常。
53.在一个具体的示例中,当声源处并未处于机器人当前可检测的范围内时,即机器人向声源处前进的路线上设有障碍物时,机器人需要根据声源产生的异音判断声源的位置,然后前往并进一步判断声源处是否发生火灾,或是发生其他的故障。
54.在另一个具体的示例中,若根据声音采集模块1、声音比较单元7和声音存储单元8初步判断声源处的异音并不是异音数据库中的异音,那么机器人也需要前往声源处,并进一步确定声源处产生的异音具体是什么。
55.机器人在向声源处移动的过程中,随着机器人与声源处的距离缩短,声源处的火灾也随之进入机器人的可视范围内。此时,机器人通过红外视觉模块5检测火灾具体的位置即第二位置信号所表示的位置信息。当控制模块3获得第二位置信号时,能够确定火灾具体的位置,进而能够向该位置喷洒灭火剂,以实现精准灭火。
56.优选的,控制器为处理芯片,可以是单片机、mcu或fpga,其能够加载一定的算法或程序以实现上述功能。其中,确定机器人自身的实时位置、第一位置信号所反映的位置信息和第二位置信号所反映的位置信息之间的对应关系的方法为相关领域技术人员的常规技术手段,故本技术实施例不进行详细说明。
57.灭火装置6连接控制模块3,用于在接收到灭火信号时灭火。
58.灭火装置6包括驱动组件61、旋转组件62和用于喷射灭火剂的灭火组件63。具体的,灭火组件63设置于旋转组件62上,并与旋转组件62连接。旋转组件62用于带动灭火组件63旋转,以改变灭火组件63的喷头的朝向。旋转组件62设置于驱动组件61上,并与驱动组件61连接。驱动组件61用于驱动灭火组件63沿竖直方向上下移动,以改变灭火组件63的高度。
其中,旋转组件62可以选择任意一种具有360
°
旋转功能的结构,驱动组件61可以选择任意一种具有升降功能的结构,当然,需要选择能够进行结合的两种结构。除此之外,驱动组件61、旋转组件62和灭火组件63的位置关系也可以进行调整。
59.在本技术中,灭火装置6优选固定设置于机器人上。在其他的实施例中,灭火装置6也可以固定设置于危险场所中,可以设置有多个。
60.本技术实施例一种应用于机器人的声源定位自动跟踪灭火系统的实施原理为:通过设置声音采集模块1、声音处理模块2、控制模块3、火灾检测模块4、红外视觉模块5和灭火装置6,以为机器人实现自动跟踪灭火的功能提供硬件基础,具有便于实现在危险场所中及时发现异常情况并做出处理的效果。
61.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,本说明书(包括摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或者具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1