举高消防车支腿支反力分布控制方法及系统与流程
本发明属于消防设备控制,尤其涉及一种举高消防车支腿支反力分布控制方法。
背景技术:
1、举高消防车装配支腿,支腿包括水平支腿和垂直支腿。通过伸展支腿,可以将车辆的跨距增大,对消防车进行支撑调平,使车辆离开地面并处于水平状态,支腿一般为四条。举高消防车支撑调平为臂架作业提供水平基准平台,同时使整车重量全部支撑在支腿上,保证车辆的作业安全。
2、国标gb7956.12《消防车第12部分:举高消防车》的安全要求部分规定,举高车工作斗
3、加载1.1倍额载、举喷车消防炮以额定压力流量喷射时,臂架受载后减小负载的二支腿剩余载荷之和要大于整备质量的6%。支腿完成支撑后,倘若各支腿支反力与理论支反力差异大,则会有一侧的垂直支腿初始支反力偏小。当初始支反力偏小的支腿处于减小负载的方向时,臂架往伸展方向动作会使支腿受力持续减小,臂架还没有到达安全作业范围边界时,垂直支腿支反力已经不能满足安全标准要求了,此时臂架伸展动作被禁止,导致车辆不能达到幅度的最大计算值。现有技术存在的问题包括:①支腿支反力变化为相互耦合的,伸长或缩短某个或多个支腿时,所有支腿的支反力都会发生改变。现有技术在进行支反力调节时,会产生两个后果:a)调节过程中,支腿支反力变化不明确,容易出现顾此失彼的问题,使已调节完成的支腿的支反力恶化,需要重复调节,导致调节过程加长。b)支反力调节结束的条件,即预设值设置可能会偏大,当支反力调节完成后,支反力分布未达到最优状态。②现有技术进行支反力调节后,满足了支腿的支反力预设范围,可能会使消防车的整车倾斜程度恶化,无法保证整车倾斜程度和支腿支反力全部满足要求。
技术实现思路
1、为了解决现有技术存在的问题,本发明提供一种举高消防车支腿支反力分布控制方法及系统,能够对举高消防车支腿支反力分布进行控制。
2、本发明所要解决的技术问题是通过以下技术方案实现的:
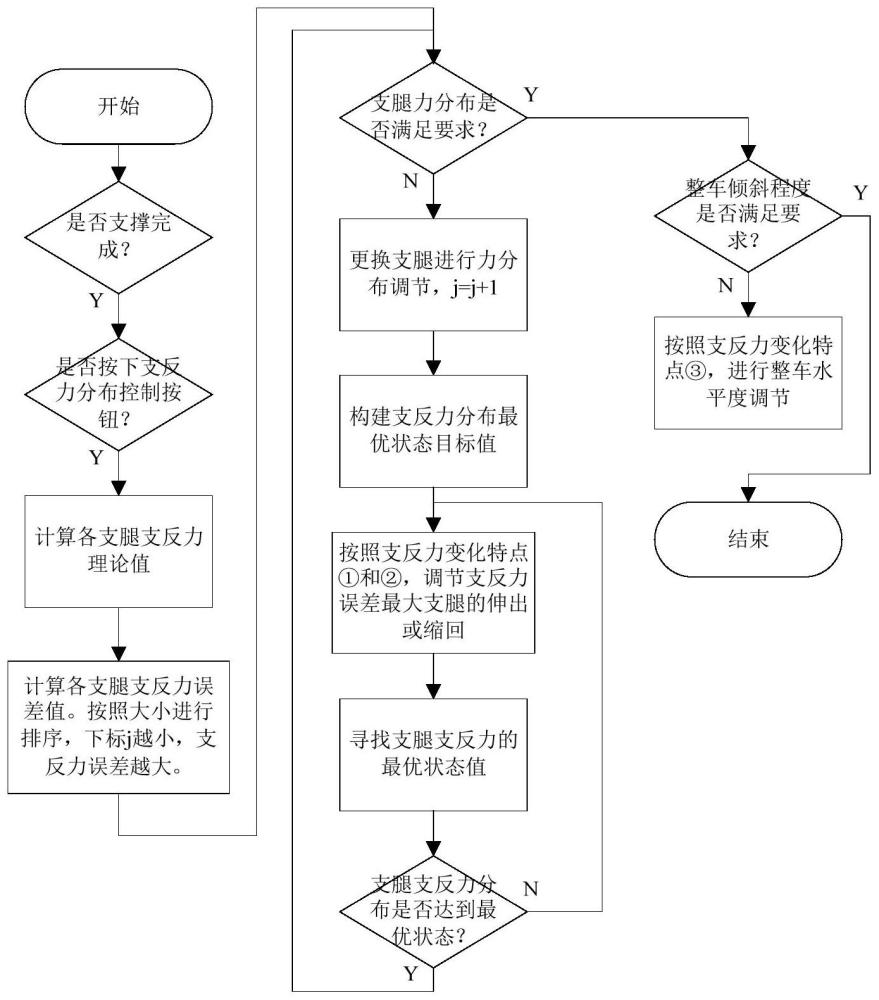
3、第一方面,提供了一种举高消防车支腿支反力分布控制方法,包括:
4、获取消防车的各支腿伸出长度、展开角度以及实际支反力值;
5、根据各支腿伸出长度、展开角度以及车辆参数得到各支腿的理论支反力值;
6、计算各支腿实际支反力值和理论支反力值的误差;
7、判断各支腿实际支反力值和理论支反力值的误差是否均小于支反力误差阈值,若是则结束支腿支反力分布控制,否则进行支腿支反力优化调节;
8、对消防车水平度进行调节。
9、结合第一方面,进一步的,所述支腿支反力优化调节包括:
10、s1、将各支腿实际支反力值和理论支反力值的误差值δfj按照大小进行排序,其中j=1,2,3,4,分别表示支反力误差值最大、次大、次小和最小的支腿;
11、s2、在未调节过的支腿中选取实际支反力值和理论支反力值误差最大的支腿进行调节,若该支腿的理论支反力值faj大于实际支反力fj,则将该支腿伸长,反之则将该支腿缩短;
12、s3、按照预设的频率获取支腿当前最优状态调节值fn,在单向调节的过程中,若fn的趋势在逐渐变小,则继续该单向调节,当经过某个采样点后fn开始变大,则将该采样点所对应的fn作为支腿最优状态目标值,记作fmin,并对该支腿进行反向调节使fn=fmin后停止该支腿的调节,并判断此刻各支腿的实际支反力值和理论支反力值的误差是否均小于支反力误差阈值,若小于则结束支腿支反力分布控制,否则回到s2对剩余支腿按照δfj由大到小的次序进行调节直到所有支腿的实际支反力值和理论支反力值的误差均小于支反力误差阈值。
13、结合第一方面,进一步的,所述当前最优状态调节值通过式(1)得到
14、
15、其中,faj、fj分别表示第j个支腿的理论支反力值和实际支反力值,j=1,2,3,4,分别表示支腿理论支反力和实际支反力误差最大,次大,次小,最小的支腿。
16、结合第一方面,进一步的,所述对消防车水平度进行调节包括:
17、通过式(2)判断整车水平度是否满足条件
18、
19、其中,θx为整车左右方向的倾斜角度,θy为整车前后方向的倾斜角度,ε2整车水平状态角度阈值;
20、若式(2)成立,则结束消防车水平度调节,否则通过同时提升整车一侧的支腿对整车一侧的倾斜角进行调节;
21、若整车向左倾斜θx,则同时提升左侧两个支腿进行找平,两个支腿提升的距离如下式所示:
22、
23、其中,lc为左后支腿提升距离,wr为左后支腿到整车重心的水平距离,ld为左前支腿提升距离,wf为左前支腿到整车重心的水平距离;
24、整车向右、前或者后方倾斜时的调节方法与整车向左倾斜的调节方法相同。
25、结合第一方面,进一步的,两个支腿的提升速度通过式(4)、(5)得到
26、
27、其中,vc'为左后支腿的参考提升速度,vd'为左前支腿的参考提升速度,t为分布控制周期;
28、
29、其中,k2为增益系数,δfc为左后支腿实际支反力与理论支反力之间的误差,δfd为左前支腿实际支反力与理论支反力之间的误差。
30、第二方面,提供了一种举高消防车支腿支反力分布控制系统,包括:
31、数据获取模块,用于获取消防车的各支腿伸出长度、展开角度以及实际支反力值;
32、理论支反力计算模块,用于根据各支腿伸出长度、展开角度以及车辆参数得到各支腿的理论支反力值;
33、支反力优化调节模块,用于计算各支腿实际支反力值和理论支反力值的误差;
34、判断各支腿实际支反力值和理论支反力值的误差是否均小于支反力误差阈值,若是则结束支腿支反力分布控制,否则进行支腿支反力优化调节;
35、水平调节模块,用于对消防车水平度进行调节。
36、本发明有益效果包括:
37、根据支腿支反力变化特点形成的力分布控制方法,支反力的调节过程中,各支腿支反力变化方向清晰,调节结束条件确定,不会出现顾此失彼、重新调节的问题,因此,力分布调节能够快速完成。
38、构建各支腿支反力分布的最优状态目标值,对支腿的支反力分布进行寻优,使支腿力分布达到最优状态,各支腿支反力的分布更加均衡。
39、力分布调节完成后,根据整车倾斜程度,进行整车水平度的调节,使已调节完成的各支腿支反力不发生变化,保证整车倾斜程度和支腿支反力分布全部能够满足要求。
技术特征:
1.一种举高消防车支腿支反力分布控制方法,其特征在于,包括:
2.根据权利要求1所述的一种举高消防车支腿支反力分布控制方法,其特征在于,所述支腿支反力优化调节包括:
3.根据权利要求2所述的一种举高消防车支腿支反力分布控制方法,其特征在于,所述当前最优状态调节值通过式(1)得到
4.根据权利要求1所述的一种举高消防车支腿支反力分布控制方法,其特征在于,所述对消防车水平度进行调节包括:
5.根据权利要求4所述的一种举高消防车支腿支反力分布控制方法,其特征在于,两个支腿的提升速度通过式(4)、(5)得到
6.一种举高消防车支腿支反力分布控制系统,其特征在于,包括:
技术总结
本发明公开了一种举高消防车支腿支反力分布控制方法包括:获取消防车的各支腿伸出长度、展开角度以及实际支反力值;根据各支腿伸出长度、展开角度以及车辆参数得到各支腿的理论支反力值;计算各支腿实际支反力值和理论支反力值的误差;判断各支腿实际支反力值和理论支反力值的误差是否均小于支反力误差阈值,若是则结束支腿支反力分布控制,否则进行支腿支反力优化调节;对消防车水平度进行调节,本发明根据支腿支反力变化特点形成的力分布控制方法,支反力的调节过程中,各支腿支反力变化方向清晰,调节结束条件确定,不会出现顾此失彼、重新调节的问题,因此,力分布调节能够快速完成。
技术研发人员:叶家良,张勇,李鑫,徐蕾,李飞,焦子学,秦豪
受保护的技术使用者:徐工消防安全装备有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!