一种多功能高空灭火机器人的制作方法
本技术属于消防设备,公开了一种多功能高空灭火机器人。
背景技术:
1、针对高空的消防灭火,目前主流有高空无人机和举高设备两种方式。
2、对于高空无人机,无人机携带灭火所需的载荷及自身重量,作业时间长度受到限制,空中作业时间短,不能长时间、大载重的开展高层消防救援作业;而现有的举高设备其灭火高度有限,因此,急需一种多功能高空灭火机器人,解决该类问题。
技术实现思路
1、针对现有技术中存在的问题,本实用新型的目的在于提供一种多功能高空灭火机器人。
2、为解决上述问题,本实用新型采用如下的技术方案。
3、一种多功能高空灭火机器人,包括所述自动行走机器人和控制器,所述自动行走机器人的顶部固定连接有安装板,所述安装板的顶部前后均设置有飞行组件,所述安装板的顶部且位于两组飞行组件之间设置有灭火装置,所述灭火装置上设置有观测组件,所述观测组件包括红外热成像传感器、测距传感器、摄像头和安装支架,所述红外热成像传感器、测距传感器和摄像头均安装在安装支架上,且红外热成像传感器、测距传感器分别位于摄像头的两侧;
4、所述灭火装置包括喷水灭火组件和干粉灭火组件,所述控制器能控制飞行组件和灭火装置工作并能与移动终端无线连接,所述控制器分别与红外热成像传感器、测距传感器、摄像头电性连接。
5、作为上述技术方案的进一步描述:所述飞行组件包括容置箱,所述容置箱固定安装在安装板的顶部,所述容置箱的内部设置有两组飞行电机,两组所述飞行电机的输出轴均固定连接有机翼,所述容置箱的左右两侧均开设有出口,所述容置箱内设置有驱动两组飞行电机经出口进出容置箱两侧的驱动组件。
6、作为上述技术方案的进一步描述:所述驱动组件包括固定安装在容置箱内底壁的双轴伺服电机,所述双轴伺服电机的输出轴均固定连接有螺纹杆,两个所述螺纹杆远离双轴伺服电机的一端分别与容置箱内壁的左右两侧转动连接,两个所述螺纹杆上均螺纹连接有移动块,所述容置箱的内顶壁开设有滑槽,两个所述移动块的顶部分别与滑槽滑动连接,两个所述移动块相背离的一侧均固定连接有固定块,两个所述固定块分别与飞行电机固定连接。
7、作为上述技术方案的进一步描述:所述喷水灭火组件包括水箱、高压水泵和水管和喷射头,所述水箱固定安装在安装板上,所述控制器固定安装在水箱的正面,所述高压水泵设置在水箱内并与水管连通,所述水管的另一端贯穿并延伸至水箱内与喷射头连通,所述安装支架固定安装在水箱的顶部。
8、作为上述技术方案的进一步描述:所述干粉灭火组件包括固定支架、干粉罐、电磁阀、干粉管和干粉喷头,所述干粉罐通过固定支架可拆装的固定安装在水箱的顶部,所述电磁阀固定安装在干粉管的输出端,所述干粉管一端与电磁阀连通,另一端与干粉喷头连通。
9、作为上述技术方案的进一步描述:所述水箱的左侧设置有能驱动喷射头和干粉喷头角度调节的调节组件。
10、作为上述技术方案的进一步描述:所述调节组件包括与水箱左侧固定连接的支撑块,所述支撑块的顶部固定连接有两个支撑板,所述喷射头位于两个支撑板之间且前后两侧与支撑板转动连接,其中一个支撑板的外侧固定安装有角度调节伺服电机,所述角度调节伺服电机的输出轴与喷射头固定连接,所述喷射头固定连接有连接杆,所述连接杆与干粉喷头固定连接。
11、相比于现有技术,本实用新型的优点在于:
12、①本方案采用飞行组件作为机动平台,能快速到达着火层,并配合观测组件、自动行走机器人、控制器和灭火装置的相互配合,能够快速高效地开展灭火作业,大大减小火灾造成的损失,同时解决飞行组件长时间飞行的负重问题。
13、②本方案的灭火装置采用多种灭火方式,能在实际灭火工作时进行自由选择,且灭火装置的喷射角度可调,灭火效果好。
技术特征:
1.一种多功能高空灭火机器人,包括自动行走机器人(1)和控制器(6),其特征在于:所述自动行走机器人(1)的顶部固定连接有安装板(2),所述安装板(2)的顶部前后均设置有飞行组件(3),所述安装板(2)的顶部且位于两组飞行组件(3)之间设置有灭火装置(4),所述灭火装置(4)上设置有观测组件(5),所述观测组件(5)包括红外热成像传感器(51)、测距传感器(52)、摄像头(53)和安装支架(54),所述红外热成像传感器(51)、测距传感器(52)和摄像头(53)均安装在安装支架(54)上,且红外热成像传感器(51)、测距传感器(52)分别位于摄像头(53)的两侧;
2.根据权利要求1所述的一种多功能高空灭火机器人,其特征在于:所述飞行组件(3)包括容置箱(31),所述容置箱(31)固定安装在安装板(2)的顶部,所述容置箱(31)的内部设置有两组飞行电机(32),两组所述飞行电机(32)的输出轴均固定连接有机翼(33),所述容置箱(31)的左右两侧均开设有出口(34),所述容置箱(31)内设置有驱动两组飞行电机(32)经出口(34)进出容置箱(31)两侧的驱动组件(35)。
3.根据权利要求2所述的一种多功能高空灭火机器人,其特征在于:所述驱动组件(35)包括固定安装在容置箱(31)内底壁的双轴伺服电机(351),所述双轴伺服电机(351)的输出轴均固定连接有螺纹杆(352),两个所述螺纹杆(352)远离双轴伺服电机(351)的一端分别与容置箱(31)内壁的左右两侧转动连接,两个所述螺纹杆(352)上均螺纹连接有移动块(353),所述容置箱(31)的内顶壁开设有滑槽(354),两个所述移动块(353)的顶部分别与滑槽(354)滑动连接,两个所述移动块(353)相背离的一侧均固定连接有固定块(355),两个所述固定块(355)分别与飞行电机(32)固定连接。
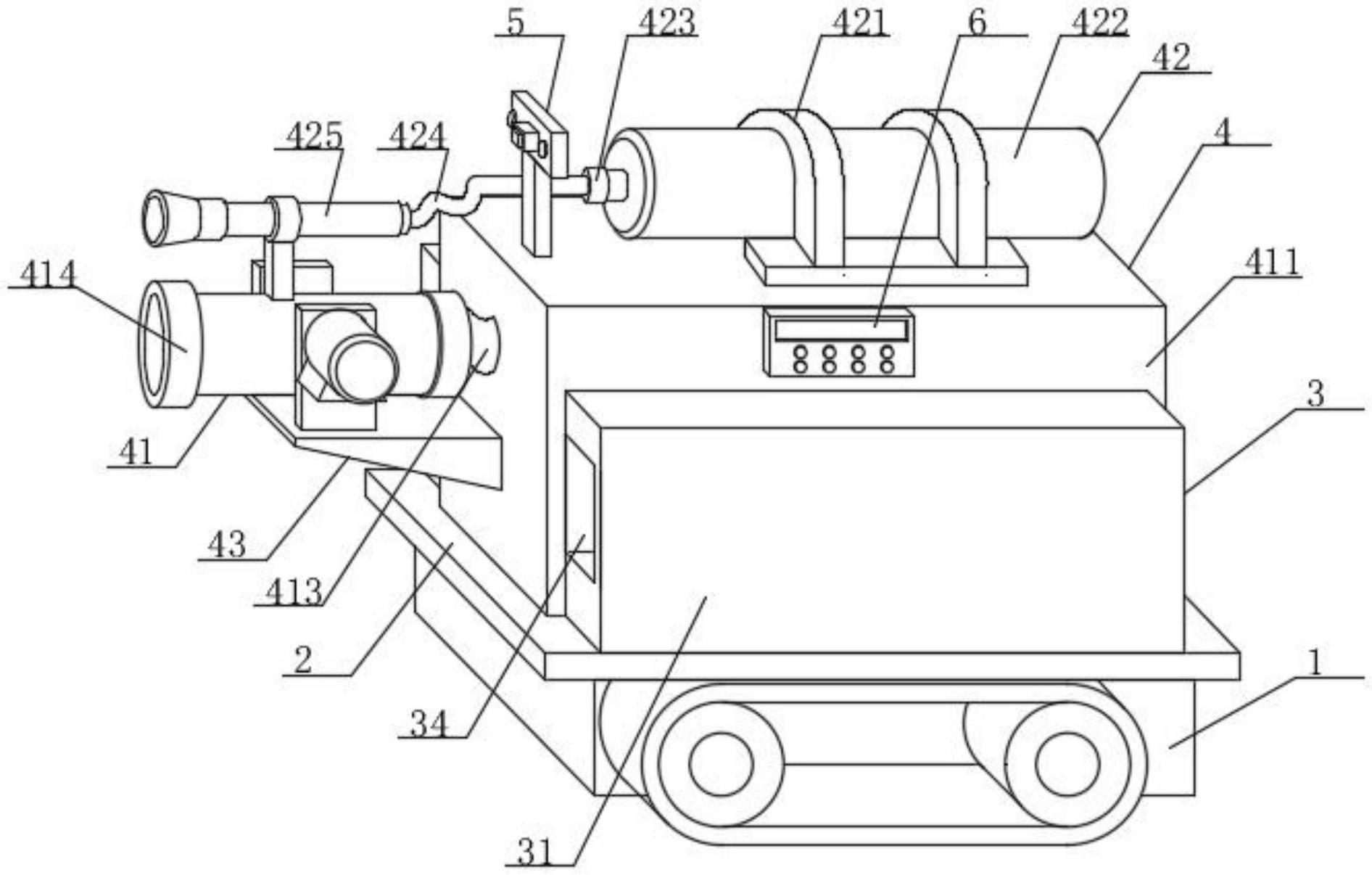
4.根据权利要求1所述的一种多功能高空灭火机器人,其特征在于:所述喷水灭火组件(41)包括水箱(411)、高压水泵(412)和水管(413)和喷射头(414),所述水箱(411)固定安装在安装板(2)上,所述控制器(6)固定安装在水箱(411)的正面,所述高压水泵(412)设置在水箱(411)内并与水管(413)连通,所述水管(413)的另一端贯穿并延伸至水箱(411)内与喷射头(414)连通,所述安装支架(54)固定安装在水箱(411)的顶部。
5.根据权利要求4所述的一种多功能高空灭火机器人,其特征在于:所述干粉灭火组件(42)包括固定支架(421)、干粉罐(422)、电磁阀(423)、干粉管(424)和干粉喷头(425),所述干粉罐(422)通过固定支架(421)可拆装的固定安装在水箱(411)的顶部,所述电磁阀(423)固定安装在干粉管(424)的输出端,所述干粉管(424)一端与电磁阀(423)连通,另一端与干粉喷头(425)连通。
6.根据权利要求5所述的一种多功能高空灭火机器人,其特征在于:所述水箱(411)的左侧设置有能驱动喷射头(414)和干粉喷头(425)角度调节的调节组件(43)。
7.根据权利要求6所述的一种多功能高空灭火机器人,其特征在于:所述调节组件(43)包括与水箱(411)左侧固定连接的支撑块(431),所述支撑块(431)的顶部固定连接有两个支撑板(432),所述喷射头(414)位于两个支撑板(432)之间且前后两侧与支撑板(432)转动连接,其中一个支撑板(432)的外侧固定安装有角度调节伺服电机(433),所述角度调节伺服电机(433)的输出轴与喷射头(414)固定连接,所述喷射头(414)固定连接有连接杆(434),所述连接杆(434)与干粉喷头(425)固定连接。
技术总结
本技术属于一种灭火机器人,具体公开了一种多功能高空灭火机器人,包括所述自动行走机器人和控制器,所述自动行走机器人的顶部固定连接有安装板,所述安装板的顶部前后均设置有飞行组件,所述安装板的顶部且位于两组飞行组件之间设置有灭火装置,所述灭火装置上设置有观测组件,所述观测组件包括红外热成像传感器、测距传感器、摄像头和安装支架。本方案采用飞行组件作为机动平台,能快速到达着火层,并配合观测组件、自动行走机器人、控制器和灭火装置的相互配合,能够快速高效地开展灭火作业,大大减小火灾造成的损失,同时解决飞行组件长时间飞行的负重问题。
技术研发人员:陈红春,刘文科
受保护的技术使用者:悟空智能科技常州有限公司
技术研发日:20230307
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!