一种用于灭火的自行走消防机器人装置的制作方法
本发明涉及消防设备,具体为一种用于灭火的自行走消防机器人装置。
背景技术:
1、消防机器人主要应用于隧道、地下建筑或者狭窄场所的灾害现场,在灭火救援中能够代替人发挥灭火功能,降低救援人员的伤亡,有效降低火场的温度,减少火场的浓烟,从而减少人员伤亡和财产损失,对提高救援安全性具有重要意义。
2、但现有的大部分消防机器人在使用时探测装置,无法判断现场火灾的具体大小,不方便做出准确判断,同时撞击时会对机器人的控制部件造成损坏,造成使用上的不便。
技术实现思路
1、本发明的目的在于提供一种用于灭火的自行走消防机器人装置,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
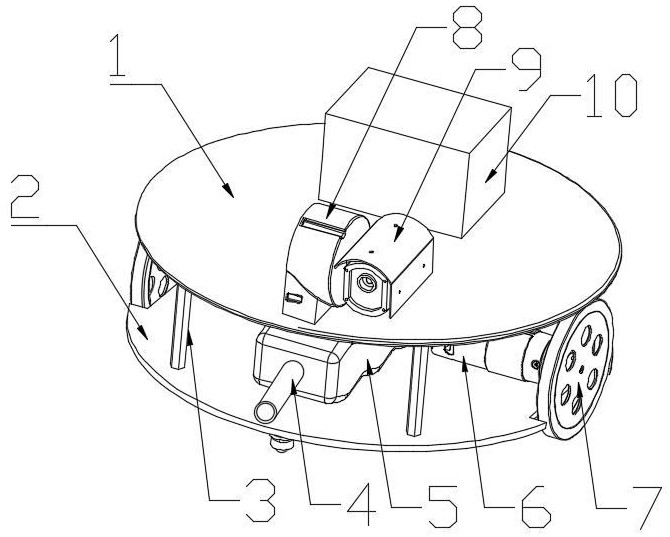
3、一种用于灭火的自行走消防机器人装置,包括顶板及底板,且二者之间通过立柱连接,所述顶板顶端设有用于探测灾情的红外线探测结构;
4、所述顶板顶端设有用于控制机器人部件的操控室;
5、所述底板顶端设有水泵,所述水泵前端设有喷水管,所述水泵后端设有与外部水源连接的软管;
6、所述底板顶端设有用于驱动机器人移动的驱动轮结构;
7、所述底板底端设有辅助行走结构。
8、进一步,所述红外线探测结构包括转动壳体及红外线探测摄像头,所述转动壳体内部设有电机,所述电机输出端延伸至转动壳体外部且与红外线探测摄像头一侧连接。
9、进一步,所述操控室内部设有设有plc板。
10、进一步,所述驱动轮结构包括驱动电机及移动轮,所述驱动电机固定于底板顶端,所述驱动电机输出端连接移动轮。
11、进一步,所述底板两侧设有与移动轮对应的凹槽。
12、进一步,所述辅助行走结构包括支撑座及钢珠,所述支撑座与底板底端固定,所述支撑座设有与钢珠嵌合的球槽。
13、进一步,所述钢珠底端与移动轮底端齐平。
14、与现有技术相比,本发明的有益效果是:
15、采用操控室配合红外线探测结构的设计,在机器人进入火场时,可以自主探测周围火情,自身作出判断,迅速灭火;采用驱动轮结构的设计,可以通过plc的控制自动移动,便于使用,同时配合辅助行走结构,有利于穿梭在火场。
技术特征:
1.一种用于灭火的自行走消防机器人装置,包括顶板(1)及底板(2),且二者之间通过立柱(3)连接,其特征在于:所述顶板(1)顶端设有用于探测灾情的红外线探测结构;
2.根据权利要求1所述的一种用于灭火的自行走消防机器人装置,其特征在于:所述红外线探测结构包括转动壳体(8)及红外线探测摄像头(9),所述转动壳体(8)内部设有电机,所述电机输出端延伸至转动壳体(8)外部且与红外线探测摄像头(9)一侧连接。
3.根据权利要求1所述的一种用于灭火的自行走消防机器人装置,其特征在于:所述操控室(10)内部设有设有plc板(11)。
4.根据权利要求1所述的一种用于灭火的自行走消防机器人装置,其特征在于:所述驱动轮结构包括驱动电机(6)及移动轮(7),所述驱动电机(6)固定于底板(2)顶端,所述驱动电机(6)输出端连接移动轮(7)。
5.根据权利要求4所述的一种用于灭火的自行走消防机器人装置,其特征在于:所述底板(2)两侧设有与移动轮(7)对应的凹槽。
6.根据权利要求1所述的一种用于灭火的自行走消防机器人装置,其特征在于:所述辅助行走结构包括支撑座(12)及钢珠(13),所述支撑座(12)与底板(2)底端固定,所述支撑座(12)设有与钢珠(13)嵌合的球槽。
7.根据权利要求6所述的一种用于灭火的自行走消防机器人装置,其特征在于:所述钢珠(13)底端与移动轮(7)底端齐平。
技术总结
本发明公开了一种用于灭火的自行走消防机器人装置,包括顶板及底板,且二者之间通过立柱连接,所述顶板顶端设有用于探测灾情的红外线探测结构;所述顶板顶端设有用于控制机器人部件的操控室;所述底板顶端设有水泵,所述水泵前端设有喷水管,所述水泵后端设有与外部水源连接的软管;所述底板顶端设有用于驱动机器人移动的驱动轮结构;所述底板底端设有辅助行走结构。本发明的有益效果是:采用操控室配合红外线探测结构的设计,在机器人进入火场时,可以自主探测周围火情,自身作出判断,迅速灭火;采用驱动轮结构的设计,可以通过PLC的控制自动移动,便于使用,同时配合辅助行走结构,有利于穿梭在火场。
技术研发人员:沈庆成
受保护的技术使用者:江苏庆亚电子科技有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!