一种变电站火灾救援机器人的制作方法
本发明属于救援设备,具体是涉及一种变电站火灾救援机器人。
背景技术:
1、救援机器人是一种为实现救援而采取先进科学技术研制的机器人,这类机器人通常配备彩色摄像机、热成像仪和通讯系统,可以分为军用救援机器人、灾后救援机器人、水下救援机器人和灾难侦察机器人等。
2、目前市面上现有的火灾救援机器人通常只具备火场侦查、消防器材运输及小范围灭火功能,当变电站中发生大型设备火灾时,一旦火情较大蔓延较快时,常规的救援机器人很难保护火场中的受困人员,导致受困人员的生存几率较低。
技术实现思路
1、针对现有技术存在的不足,本发明实施例的目的在于提供一种变电站火灾救援机器人,以解决上述背景技术中的问题。
2、为实现上述目的,本发明提供如下技术方案:
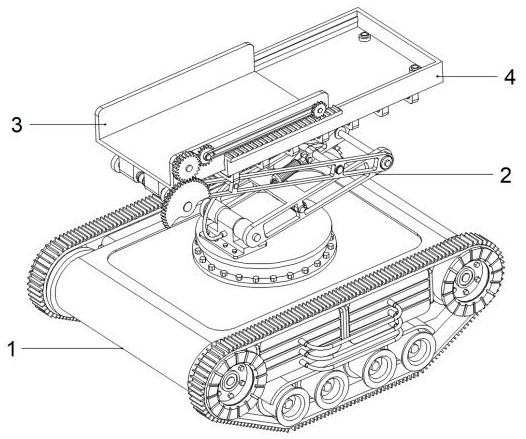
3、一种变电站火灾救援机器人,包括驱动组件,所述驱动组件包括主机体、履带轮和轴台,所述主机体两端设置有可独立运动的履带轮,所述主机体顶部设置有可旋转的轴台;
4、力臂组件,所述力臂组件包括第一力臂和第二力臂,所述第一力臂一端限位转动装配于轴台上,另一端限位转动连接有第二力臂,且所述第一力臂和第二力臂之间错位设置,以使所述第一力臂和第二力臂在纵向方向上可进行折叠收纳;
5、基座组件,所述基座组件包括定基座,所述定基座转动装配于第二力臂末端;
6、伸缩构件,所述伸缩构件包括伸缩架,所述伸缩架限位滑动装配于定基座上,且所述伸缩架与所述第二力臂之间联动相接,用于控制所述伸缩架在定基座一侧的伸缩,当所述定基座与第二力臂之间处于旋转打开状态时,所述定基座和伸缩架之间同步趋于滑动展开状态,当所述定基座与第二力臂之间处于旋转收缩状态时,所述定基座和伸缩架之间同步趋于滑动收缩状态。
7、作为本发明进一步的方案,所述驱动组件还包括输出阀,所述输出阀固定设置于轴台上,且连通氧气罐和/或水罐,所述的氧气罐和/或水罐设置于主机体内部,且与所述输出阀之间相连通。
8、作为本发明进一步的方案,所述力臂组件还包括第一液压泵、第一连接件、第二液压泵和第二连接件,所述第一液压泵设置于轴台和第一力臂之间,所述第一液压泵一端与所述轴台之间转动相接,另一端转动装配有第一连接件,所述第一液压泵与所述第一力臂之间转动相接,所述第二液压泵设置于第一力臂和第二力臂之间,所述第二液压泵一端与第一力臂转动相接,另一端转动装配有第二连接件,所述第二连接件与第二力臂之间转动相接。
9、作为本发明进一步的方案,所述力臂组件还包括回旋电机、第一同步带和主轴,所述回旋电机固定设置于第二力臂上,所述主轴转动装配于第二力臂末端,且所述主轴与所述定基座之间固定相接,所述第一同步带联动装配于回旋电机和主轴之间。
10、作为本发明进一步的方案,所述基座组件还包括齿盘、第一传动齿轮、第二传动齿轮、第三传动齿轮和第二同步带,所述齿盘固定装配于第二力臂一端,所述第一传动齿轮定轴转动装配于定基座一侧,且第一传动齿轮与所述齿盘之间啮合相接,所述第二传动齿轮定轴装配于第一传动齿轮一侧且与之间啮合相接,所述第三传动齿轮定轴装配于定基座一端且与第二传动齿轮之间通过第二同步带联动相接。
11、作为本发明进一步的方案,所述伸缩构件还包括侧齿条和把手,所述侧齿条固定设置于伸缩架一端且靠近所述第三传动齿轮一端设置,且侧齿条与所述第三传动齿轮啮合相接,若干个所述的把手阵列布设于伸缩架一端且与伸缩架固定相接。
12、作为本发明进一步的方案,所述伸缩构件还包括喷嘴和导管,所述喷嘴固定设置于伸缩架一侧,且一端设置于伸缩架的腔内,另一端通过导管与所述输出阀装配相接,用于向伸缩架中输出氧气和/或水雾。
13、综上所述,本发明实施例与现有技术相比具有以下有益效果:
14、本发明通过在主机体上设置有可折叠的第一力臂和第二力臂,并在第二力臂上安装有可滑动收缩的定基座和伸缩架,能够在火场中快速移动并实现顶撑、承载、运输、保护、供氧及降温等多种功能,能够在火场中快速搜寻伤患并进行保护,极大提升了受困人员的生存概率,具有优良的推广价值。
技术特征:
1.一种变电站火灾救援机器人,其特征在于,所述变电站火灾救援机器人包括:
2.根据权利要求1所述的一种变电站火灾救援机器人,其特征在于,所述驱动组件还包括输出阀,所述输出阀固定设置于轴台上,且连通氧气罐和/或水罐,所述的氧气罐和/或水罐设置于主机体内部,且与所述输出阀之间相连通。
3.根据权利要求1所述的一种变电站火灾救援机器人,其特征在于,所述力臂组件还包括第一液压泵、第一连接件、第二液压泵和第二连接件,所述第一液压泵设置于轴台和第一力臂之间,所述第一液压泵一端与所述轴台之间转动相接,另一端转动装配有第一连接件,所述第一液压泵与所述第一力臂之间转动相接,所述第二液压泵设置于第一力臂和第二力臂之间,所述第二液压泵一端与第一力臂转动相接,另一端转动装配有第二连接件,所述第二连接件与第二力臂之间转动相接。
4.根据权利要求1所述的一种变电站火灾救援机器人,其特征在于,所述力臂组件还包括回旋电机、第一同步带和主轴,所述回旋电机固定设置于第二力臂上,所述主轴转动装配于第二力臂末端,且所述主轴与所述定基座之间固定相接,所述第一同步带联动装配于回旋电机和主轴之间。
5.根据权利要求1所述的一种变电站火灾救援机器人,其特征在于,所述基座组件还包括齿盘、第一传动齿轮、第二传动齿轮、第三传动齿轮和第二同步带,所述齿盘固定装配于第二力臂一端,所述第一传动齿轮定轴转动装配于定基座一侧,且第一传动齿轮与所述齿盘之间啮合相接,所述第二传动齿轮定轴装配于第一传动齿轮一侧且与之间啮合相接,所述第三传动齿轮定轴装配于定基座一端且与第二传动齿轮之间通过第二同步带联动相接。
6.根据权利要求5所述的一种变电站火灾救援机器人,其特征在于,所述伸缩构件还包括侧齿条和把手,所述侧齿条固定设置于伸缩架一端且靠近所述第三传动齿轮一端设置,且侧齿条与所述第三传动齿轮啮合相接,若干个所述的把手阵列布设于伸缩架一端且与伸缩架固定相接。
7.根据权利要求2所述的一种变电站火灾救援机器人,其特征在于,所述伸缩构件还包括喷嘴和导管,所述喷嘴固定设置于伸缩架一侧,且一端设置于伸缩架的腔内,另一端通过导管与所述输出阀装配相接,用于向伸缩架中输出氧气和/或水雾。
技术总结
本发明公开了一种变电站火灾救援机器人,属于救援设备技术领域,包括主机体、力臂组件、定基座和伸缩架,主机体顶部设置有可旋转的轴台,力臂组件包括第一力臂和第二力臂,第一力臂转动装配于轴台上,末端转动连接有第二力臂,定基座转动装配于第二力臂末端,伸缩架限位滑动装配于定基座上,伸缩架与第二力臂之间联动相接,用于控制伸缩架在定基座一侧的伸缩量,本发明通过在主机体上设置有可折叠的第一力臂和第二力臂,并在第二力臂上安装有可滑动收缩的定基座和伸缩架,能够在火场中快速移动并实现顶撑、承载、运输、保护、供氧及降温等多种功能,能够在火场中快速搜寻伤患并进行保护,极大提升了受困人员的生存概率,具有优良的推广价值。
技术研发人员:侯骏,殷守斌,王智杰,艾茂民,牛硕丰,刘宏领,王庆泽,邵珠玉,郭奇军,谷栋
受保护的技术使用者:国网山东省电力公司菏泽供电公司
技术研发日:
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!