安全带智能监控方法及安全带与流程
本技术涉及高空作业,尤其涉及一种安全带智能监控方法及安全带。
背景技术:
1、在输电工程施工中,施工人员需要在铁塔上进行上下攀爬、横向移动等工作,在施工过程工作人员处在几十米甚至上百米的高空中,安全带的使用显得尤为重要。即便在现有的安全带普遍使用的情况下,施工人员坠塔的情况也难以杜绝。其根本原因是施工人员个人危险意识不强,在高空作业时未按照要求正确使用安全带,并且高处施工离地面距离远,短时间内不易发现施工人员未按照要求正确使用安全带。
2、传统的检测施工人员是否正确使用安全带的方式是通过作业人员或监护人员人为检测高空作业安全带是否被安全使用。然而,人工检测的效率和准确率低下,无法保证高空作业人员的安全。
技术实现思路
1、本技术实施例提供了一种安全带智能监控方法及安全带,以解决人工检测效率和准确率低,无法保证高空作业人员的安全的问题。
2、第一方面,本技术实施例提供了一种安全带智能监控方法,安全带包括安全带主体以及与安全带主体连接的第一悬挂挂钩和第二悬挂挂钩,第一悬挂挂钩上设有第一定位装置和第一图像获取装置,第二悬挂挂钩上设有第二定位装置和第二图像获取装置,安全带主体的腰部位置设有第三定位装置和报警装置,方法包括:
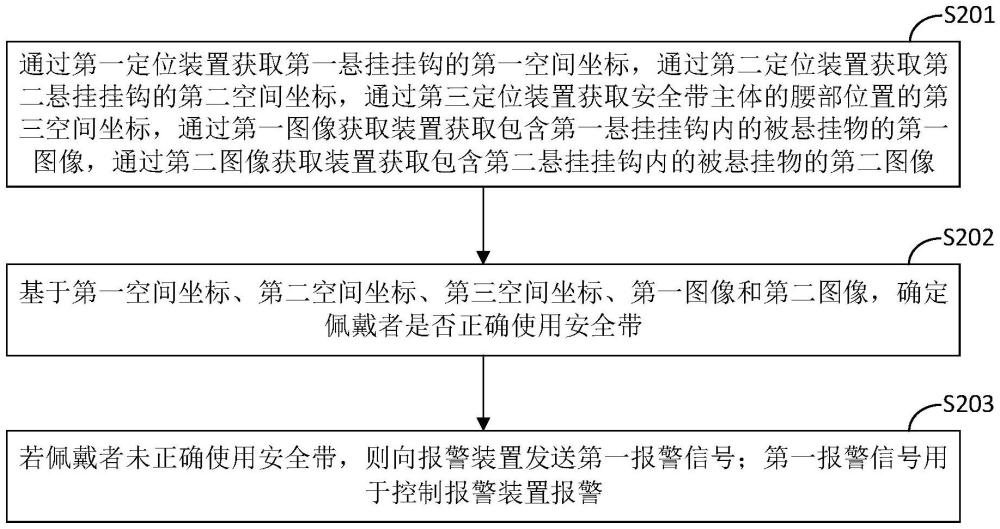
3、通过第一定位装置获取第一悬挂挂钩的第一空间坐标,通过第二定位装置获取第二悬挂挂钩的第二空间坐标,通过第三定位装置获取安全带主体的腰部位置的第三空间坐标;通过第一图像获取装置获取包含第一悬挂挂钩内的被悬挂物的第一图像;通过第二图像获取装置获取包含第二悬挂挂钩内的被悬挂物的第二图像;
4、基于第一空间坐标、第二空间坐标第三空间坐标、第一图像和第二图像,确定佩戴者是否正确使用安全带;若佩戴者未正确使用安全带,则向报警装置发送第一报警信号;第一报警信号用于控制报警装置报警。
5、在一种可能的实现方式中,基于第一空间坐标、第二空间坐标、第三空间坐标、第一图像和第二图像,确定佩戴者是否正确使用安全带,包括:
6、基于第一空间坐标,确定第一悬挂挂钩的第一高度;
7、基于第二空间坐标,确定第二悬挂挂钩的第二高度;
8、基于第三空间坐标,确定安全带主体的腰部位置的第三高度;
9、基于第一高度、第二高度和第三高度,确定第三高度符合的任一种预设条件种类;其中,预设条件包括第一预设条件、第二预设条件、第三预设条件和第四预设条件;第一预设条件为第三高度低于第一高度,且第三高度高于第二高度;第二预设条件为第三高度高于第一高度,且第三高度低于第二高度;第三预设条件为第三高度低于第一高度,且第三高度低于第二高度;第四预设条件为第三高度高于第一高度,且第三高度高于第二高度;
10、基于第三高度符合的任一种预设条件种类,确定施工人员是否高挂低用使用安全带;其中,高挂低用为正确使用安全带;
11、若是,则基于第一高度、第二高度、第三高度、第一图像和第二图像,确定第一悬挂挂钩和第二悬挂挂钩是否挂在佩戴者身上;
12、若第一悬挂挂钩和第二悬挂挂钩中有任一悬挂挂钩挂在佩戴者身上,则确定佩戴者未正确使用安全带。
13、在一种可能的实现方式中,基于第一高度、第二高度、第三高度、第一图像和第二图像,确定第一悬挂挂钩和第二悬挂挂钩是否挂在佩戴者身上,包括:
14、分别计算第三高度与第一高度之间的第一高度差,以及第三高度与第二高度之间的第二高度差;
15、在第一预设时间段内,监测第一高度差和第二高度差是否发生变化;
16、若第一高度差和第二高度差均未发生变化,则基于第一图像和第二图像,确定第一悬挂挂钩和第二悬挂挂钩是否挂在佩戴者身上。
17、在一种可能的实现方式中,基于第三高度符合的任一种预设条件种类,确定佩戴者是否高挂低用使用安全带,包括:
18、若第三高度符合第一预设条件、第二预设条件和第三预设条件中的任一预设条件,则确定佩戴者的安全带是高挂低用;
19、若第三高度符合第四预设条件,则确定佩戴者的安全带是低挂高用;其中,低挂高用为错误使用安全带。
20、在一种可能的实现方式中,在确定佩戴者的安全带是高挂低用之后,方法还包括:
21、在第二预设时间段内,监测第一高度、第二高度、第三高度的变化情况;
22、在该第二预设时间段内,若第一高度、第二高度和第三高度均增大/减小,则确定佩戴者在进行上下移动;
23、比较该第二预设时间段内的第一高度和第二高度的大小;
24、若在该第二预设时间段内第一高度和第二高度交替为较大高度,则确定佩戴者正确使用安全带;
25、否则确定佩戴者未正确使用安全带。
26、在一种可能的实现方式中,第一空间坐标、第二空间坐标和第三空间坐标是基于预设空间坐标系确定的坐标;其中,预设坐标系可使得第一空间坐标、第二空间坐标和第三空间坐标所代表的点位于同一象限,且预设坐标系的z轴垂直于水平面;
27、在确定佩戴者的安全带是高挂低用之后,所述方法还包括:
28、计算第一空间坐标距离预设坐标系的z轴的第一距离;
29、计算第二空间坐标距离预设坐标系的z轴的第二距离;
30、计算第三空间坐标距离预设坐标系的z轴的第三距离;
31、在第三预设时间段内,基于第一距离、第二距离和第三距离的变化情况,确定佩戴者是否正确横向移动。
32、在一种可能的实现方式中,在第三预设时间段内,基于第一距离、第二距离和第三距离的变化情况,确定佩戴者是否正确横向移动,包括:
33、在第三预设时间段内,监测第一距离、第二距离和第三距离的变化情况;
34、在该第三预设时间段内,若第一距离、第二距离和第三距离均增大/减小,则确定佩戴者在进行横向移动;
35、比较该第三预设时间段内的第一距离和第二距离的大小;
36、若在该第三预设时间段内第一距离和第二距离交替为较大距离,则确定佩戴者正确横向移动;
37、否则确定佩戴者未正确横向移动。
38、在一种可能的实现方式中,若佩戴者未正确使用安全带,则向报警装置发送第一报警信号,包括:
39、若佩戴者未正确使用安全带,则向报警装置发送第一报警信号,第一报警信号用于控制报警装置进行声光报警;
40、在若佩戴者未正确使用安全带,则向报警装置发送第一报警信号之后,所述方法还包括:
41、向监护者发送提示信号;其中,提示信号用于提示监护者查看第一图像和第二图像;
42、接收第一监护信号,并基于第一监护信号向报警装置发送第二报警信号;其中,第一监护信号为监护者基于第一图像和第二图像,确定佩戴者未正确使用安全带后发出的信号;第二报警信号用于控制报警装置进行语音报警。
43、在一种可能的实现方式中,在向监护者发送提示信号之后,所述方法还包括:
44、接收第二监护信号,并基于第二监护信号向报警装置发送消除报警信号;其中,第二监护信号为监护者基于第一图像和第二图像,确定佩戴者正确使用安全带后发出的信号;消除报警信号用于控制报警装置关闭声光报警。
45、第二方面,本技术实施例提供了一种安全带,包括:安全带主体以及与安全带主体连接的第一悬挂挂钩和第二悬挂挂钩;
46、第一悬挂挂钩上设有第一定位装置和第一图像获取装置,第二悬挂挂钩上设有第二定位装置和第二图像获取装置,安全带主体的腰部位置设有第三定位装置、报警装置和处理器;
47、第一定位装置,用于确定第一悬挂挂钩的第一空间坐标;
48、第二定位装置,用于确定第二悬挂挂钩的第二空间坐标;
49、第三定位装置,用于确定安全带主体的腰部位置的第三空间坐标;
50、第一图像获取装置,用于获取包含第一悬挂挂钩内的被悬挂物的第一图像;
51、第二图像获取装置,用于获取包含第二悬挂挂钩内的被悬挂物的第二图像;
52、处理器,用于获取第一空间坐标、第二空间坐标、第三空间坐标、第一图像和第二图像,并基于第一空间坐标、第二空间坐标、第三空间坐标、第一图像和第二图像,确定佩戴者是否正确使用安全带;若佩戴者未正确使用安全带,则向报警装置发送第一报警信号;
53、报警装置,用于接收第一报警信号,并基于第一报警信号进行报警。
54、本技术实施例提供一种安全带智能监控方法及安全带,通过第一定位装置获取第一悬挂挂钩的第一空间坐标,通过第二定位装置获取第二悬挂挂钩的第二空间坐标,通过第三定位装置获取安全带主体的腰部位置的第三空间坐标,通过第一图像获取装置获取包含第一悬挂挂钩内的被悬挂物的第一图像,通过第二图像获取装置获取包含第二悬挂挂钩内的被悬挂物的第二图像。然后,基于第一空间坐标、第二空间坐标、第三空间坐标第一图像和第二图像,确定佩戴者是否正确使用安全带。若佩戴者未正确使用安全带,则向报警装置发送用于控制报警装置报警的第一报警信号。本技术实施例提供的安全带智能监控方法可提高检测效率和准确率,进而可较好地保障高空作业人员的安全。
- 还没有人留言评论。精彩留言会获得点赞!