一种利用超级加捻实现大应变人工肌肉的制作方法
1.本发明涉及一种利用超级加捻实现大应变人工肌肉的制作方法,适用于智能织物、柔性康复手套以及仿生机器人等技术领域。
背景技术:
2.人工肌肉顾名思义是一种仿照自然肌肉制作出来的一种柔性驱动器。人工肌肉在外界刺激条件下(如温度、电流、湿度、离子、光、磁场)可以产生伸缩、弯曲、扭转以及他们的组合等运动形式。人工肌肉作为一种新型仿生柔性驱动器与生物肌肉类似,具有收缩应力大,功率密度高以及能量转换效率高等优点。在软体机器人、柔性外骨骼、智能织物、传感器以及生物医疗领域等领域有着广阔的应用前景。
3.目前可以用作人工肌肉的智能材料包括形状记忆合金、电活性聚合物、碳纳米管纤维、尼龙线、石墨烯纤维、天然纤维和聚乙烯纤维等。其中碳纳米管纤维作为碳纳米管(cnt)的多种宏观组装体之一,继承了碳纳米管优异的导电性、导热性、力学强度高等特点且是目前已知材料比强度最高的材料。使用碳纳米管纤维制作出来的碳纳米管人工肌肉纱线纱线具有强度大,响应速度快,循环性好,工作电压低等诸多优点。经过研究发现碳纳米管制作的纤维具有良好的导电性、导热性及各向异性,受热会发生膨胀,但由纯碳纳米管制作的人工肌肉纱线纱线应变仅有1%,实际应用价值不大。
4.碳纳米管人工肌肉纱线的驱动方式多样,例如电化学驱动、气动驱动和光驱动等。针对碳纳米管材料的人工肌肉纱线电化学驱动,主要是在电解液或凝胶电解质中,碳纳米管人工肌肉纱线作为工作电极,施加电压后,电解液/质中的溶剂化离子重新进入碳纳米管纤维束之间的微纳米孔道中,导致材料发生宏观形变,从而可以通过改变电压来控制碳纳米管人工肌肉纱线的驱动。电化学驱动虽然具有低电压、易控制、能量密度高且没有热效应的优点,但是电化学驱动需要使用电解液,但是目前还没有有效的封装手段,应用场景受限。针对碳纳米管材料的人工肌肉纱线气动驱动,主要是将气动碳纳米管人工肌肉纱线通过气体嵌入腔体引起不均匀体积膨胀而产生形变,具有快速驱动、大收缩冲程、可编程等特点,但它们需要压力泵,不便于携带使用。针对碳纳米管材料的碳人工肌肉纱线光驱动,由于其产生的收缩应变相对较小以及响应较慢的缺点,限制了它们的使用。针对碳纳米管材料的人工肌肉纱线电热驱动,由于具有清洁无污染、获取简单、且易于控制、制作简单等优点,受到诸多研究者的青睐。
技术实现要素:
5.本发明的目的在于提供一种利用超级加捻实现大应变人工肌肉的制作方法,实现电热驱动下对碳纳米管人工肌肉纱线在输出应变、循环稳定性等性能上的改进。
6.为实现上述发明目的,本发明采取的技术方案为:一种利用超级加捻实现大应变人工肌肉的制作方法,包括如下步骤:s1:将碳纳米管薄膜卷成圆筒状,然后将其一端连接电机,一端施加重物,用一个长条状物体连接重物端,用物体将长条物体卡住,以保证下端
不会随着电机转动而转动,控制电机以规定的速度将所述碳纳米管薄膜加捻成恰好形成纤维的状态,取下碳纳米管纤维,将两端捻的不好的部分剪掉,然后重新使用回形针打结固定;s2:将步骤s1中的碳纳米管纤维浸入稀释过的硅胶溶液中,浸润规定时间后,将碳纳米管纤维垂直拿出,进行干燥处理;s3:将步骤s2中固化好的碳纳米管纤维一端重新连接电机,另一端施加重物,用一个长条状物体连接重物端,用物体将长条物体卡住,以保证下端不会随着电机转动而转动,控制电机以规定的速度旋转,直到将固化好的碳纳米管纤维完全被加捻成超螺旋结构的碳纳米管人工肌肉纱线,并立刻给电机断电。s4:将步骤s3中的超螺旋结构的碳纳米管人工肌肉纱线取下,悬挂在铁架台上,在两端的回形针上分别用铜丝打结作为导线通电使用,使用直流稳压电源连接两端铜线,通过施加电压来对超螺旋结构的碳纳米管人工肌肉纱线进行性能训练。
7.上述方案中,步骤s1中,所述圆筒状的碳纳米管薄膜的制备方法为:将碳纳米管垂直阵列放入模具中,拉出6层以上的碳纳米管薄膜,所述碳纳米管薄膜的总宽度大于200mm,并通过模具将所述碳纳米管薄膜卷成圆筒状。
8.上述方案中,步骤s1中,所述碳纳米管垂直阵列的制备方法为:通过化学气相沉积方法(cvd)来制备,首先,由甲烷作为碳源,二茂铁、噻吩蒸汽分别用作催化剂和生长促进剂,以氦气作为载气将以上气态原料通入反应器中,碳纳米管的合成过程在700℃以上进行,保证反应在氢气气氛中进行,最终制得多壁碳纳米管垂直阵列。
9.上述方案中,步骤s2中,所述硅胶溶液的制备方法为:将硅胶基体和固化剂按照规定比例配置硅胶溶液,然后使用有机溶剂进行稀释,稀释后进行脱气处理。
10.上述方案中,步骤s2中,干燥处理的过程为:将纤维取出后放入真空干燥箱箱中进行快速固化,或者放在室温情况自然风干固化。
11.上述方案中,步骤s3中,形成超螺旋结构碳纳米管人工肌肉纱线的具体过程为:在电机旋转过程中所述固化好的碳纳米管纤维首先被加捻成螺旋结构,然后继续控制电机以相同速度继续加捻,直到纤维长度变短速度加快,直径明显变大,表明已经出现超螺旋结构,直至纤维完全形成超螺旋结构的碳纳米管人工肌肉纱线。
12.上述方案中,步骤s4中,对超螺旋结构的碳纳米管人工肌肉纱线进行性能训练的具体过程为:在超螺旋结构的碳纳米管人工肌肉纱线下端悬挂重物,拉开碳纳米管人工肌肉纱线的螺旋节,训练时先使用1 hz,占空比50%,3 v的脉冲测试其能否导电,观测到能导电之后,以2 v为梯度递加,每次加完电压后,以此电压,前述其它相同条件,持续训练十几秒,逐步加电压,直到出现冒烟现象,立刻断电,以比冒烟时电压低3-4v的电压持续训练,直到碳纳米管人工肌肉纱线的收缩性能趋于稳定,后续训练均以比冒烟情况下的电流低0.05 a的电流进行训练,经过训练的碳纳米管人工肌肉纱线循环稳定性能达到最优状态。
13.本发明还保护一种利用上述制作方法形成的大应变碳纳米管人工肌肉纱线。
14.本发明的有益效果:(1)经本方法改进制作出来的超螺旋结构的碳纳米管人工肌肉纱线纤维可以提供较大的冲程和可逆驱动,对于应用在仿生机器人、电热康复手套、可穿戴设备等具有广阔的应用前景。(2)相较于气动、磁热、电化学等驱动方式,电热驱动具有应用广泛、能源获取简单等固有优势,其驱动方式在日常生活中应用非常广泛,获取能量来源简单,不需要额外的设备。
附图说明
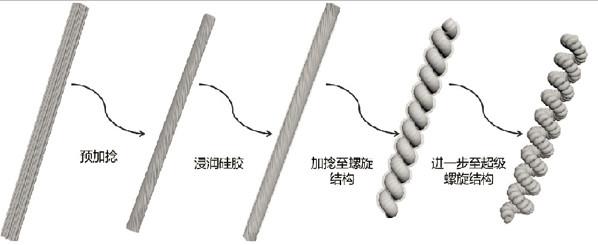
15.图1.为超级螺旋结构的碳纳米管人工肌肉纱线工艺过程展示图。
16.图2.为碳纳米管人工肌肉纱线sem图。
17.图3.为cnt@mold maxtm25超螺旋结构人工肌肉纱线在2 hz频率、13 v电压、8.965 g载荷下的循环稳定性测试性能图。
18.图4.为cnt@mold maxtm25超螺旋结构人工肌肉纱线在15 v、11.2 mpa、0.2 hz下的相应的应变与时间关系图像。
19.图5.为超螺旋结构与复合硅胶了的普通螺旋结构的在不同频率下的驱动应变性能对比图。
具体实施方式
20.下面结合附图,对本发明的技术方案进行更详细的说明。
21.本发明提供了一种利用超级加捻实现大应变人工肌肉的制作方法,制作流程如附图1所示。具体步骤如下所示。
22.步骤一:通过现有的化学气相沉积方法(cvd)来制备可纺丝的碳纳米管阵列可。首先,由甲烷作为碳源,二茂铁、噻吩蒸汽分别用作催化剂和生长促进剂。以氦气作为载气将以上气态原料通入反应器中。碳纳米管的合成过程在高温下(700℃以上)进行,而且反应在氢气气氛中进行,由此可制得多壁碳纳米管阵列。
23.步骤二:利用模具从碳纳米管垂直阵列里面拉出数层(6层以上强度更佳),总宽度大于200 mm的碳纳米管薄膜,拉出的薄膜两端分别粘在模具的双面胶上,再次使用双面胶粘在拉出的薄膜的两端,使用两个回形针粘在双面胶上。将回形针翻卷,使得碳纳米管薄膜形成卷筒状结构。将卷筒状的薄膜从模具上取下来,一端用回形针固定在电机轴上,另一端悬挂4g的砝码,使其自然下垂,使用砝码是为了保证碳纳米管薄膜拉直。悬挂砝码端使用长条状物体(比如扎带)卡住回形针,以保证薄膜下端不会随着电机轴的转动而转动。使用arduino开发板控制电机以200 rpm的速度朝着一个方向转动。当滚筒状恰好变为纤维状态时,立刻关闭电机。将纤维取下,剪掉两端没处理好的部分,然后将加捻好的纤维两端重新在回形针上打结。
24.步骤三:制备硅胶溶液。本专利所用有机硅橡胶选用任何一种热膨胀系数大的硅胶都可以,本示例所用硅胶为mold max
tm 25, mold max
tm 25为缩合型有机硅橡胶,购自美国smooth-on公司。将基体和固化剂按照20:1的质量比进行配置,稀释溶剂以质量比为1:3的比例进行稀释,本实施例使用正己烷这种有机溶剂作为稀释剂。硅胶与稀释剂配比完成后,放入一颗磁力搅拌子,用磁力搅拌器充分混合均匀。取出磁力搅拌子,然后放入真空抽气装置中脱气5 min。
25.步骤四:将处理好的硅胶倒入特制模具中,然后将步骤二所述重新打结好的纤维完全浸入硅胶中。浸润5-8秒,将纤维垂直溶液表面取出,这样纤维表面涂覆的硅胶会更均匀,不会出现液滴状的不均匀点。若取出有不均匀点,重新完全浸入,再次垂直取出即可。将纤维取出后放入真空干燥箱箱中,使用60℃处理2 h,可以达到快速固化的目的。放在室温情况自然风干固化8 h也能达到相同的固化效果。
26.碳纳米管薄膜卷成的纤维内部和表面均有很多孔隙。使用硅胶浸润,可以使得硅
胶进入碳纳米管纤维内部,与纤维充分结合,就能形成有机硅橡胶复合碳纳米管纤维。在碳纳米管纤维中掺入一定量的有机硅橡胶可以显著增加人工肌肉复合纤维的热膨胀系数。当温度升高的时候,由于纱线具有各向异性,螺旋节会发生径向的膨胀,进而使得人工肌肉纱线产生轴向的收缩。
27.步骤四:将固化好的有机硅橡胶复合碳纳米管纤维重新放在加捻装置上进行加捻。一端用回形针固定在电机轴上,另一端悬挂4 g的砝码,使其自然下垂,使用砝码是为了保证碳纳米管薄膜拉直。悬挂砝码端使用长条状物体(比如扎带)卡住回形针,以保证薄膜下端不会随着电机轴的转动而转动。使用arduino开发板控制电机以200 rpm的速度朝着一个方向转动。在纤维形成螺旋卷绕式结构的过程中,纤维的直径会略微变粗,长度变短。当完全形成螺旋结构之后,对其继续进行加捻,普通螺旋到超螺旋结构的过程中,纤维的直径会明显变粗,长度变短速度加快。完全形成超螺旋结构后(如图2所示),立刻断开电机,以防止截切力过大而导致纤维断裂。
28.对碳纳米管纤维进行超级加捻,可以提高纤维的捻度以及减小纱线的长度。随着捻度的增加,纱线的应变也会越来越大,这是由于在加捻过程中随着捻度的增加纱线长度不断缩短,故其可被拉伸的空间就越来越大。超级加捻对于提高可拉伸空间增益很大。
29.步骤五:将前述超螺旋结构碳纳米管人工肌肉纱线取下后,悬挂在铁架台上,在两端的回形针上分别用铜丝打结作为导线通电使用。使用直流稳压电源连接两端铜线先施加方波低电压,训练其稳定性,逐步增加电压来训练肌肉,直到肌肉收缩性能达到稳定。具体而言,在人工肌肉下端悬挂比加捻时略重的物体,拉开人工肌肉的螺旋节,训练时先使用1 hz,占空比50%,3 v的脉冲测试其能否导电。观测到人工肌肉能导电之后,以2 v为梯度递加,每次加完电压后,以此电压,前述其它相同条件,对肌肉训练十几秒。逐步加电压,直到肌肉出现冒烟现象,立刻断电,以比冒烟时电压低3-4v的电压持续训练,直到肌肉的收缩性能趋于稳定。后续训练均以比冒烟情况下的电流低0.05 a的电流进行训练,经过训练的肌肉循环稳定性能更好,如图3所示。
30.步骤六:在超螺旋结构碳纳米管人工肌肉纱线上悬挂训练时所用重物,在一个密闭空间内施加电压进行应力应变测试,防止外界气流吹动肌肉,干扰测试结果。利用位移传感器和labview 软件进行时间与位移的测试,进而得到应变与时间的关系图。
31.本发明所制备的电热驱动型超级加捻碳纳米管人工肌肉纱线的制备机理为:硅胶作为一种典型的柔性驱动材料,具有较大的热膨胀系数,因此对于提高超级螺旋卷绕式的纤维人工肌肉的应变具有较强的增益。除了所选材料具有较大热膨胀系数外,驱动性能主要取决于复合纱线的扭转密度、惯性矩以及施加的应力等因素。特别是具有较高的的扭转密度对输出应变有着较大的影响。形成超级螺旋卷绕式的结构,使超级螺旋卷绕式人工肌肉纱线比普通螺旋卷绕式人工肌肉具有更大捻度,是提高碳纳米管纤维人工肌肉应变性能的关键。因为人工肌肉纤维的轴向长度变化量与捻度成正比关系。在硅胶与碳纳米管纤维复合之后,过加捻形成超级螺旋卷绕式人工肌肉。然后对人工肌肉两端施加电压,以碳纳米管纱线作为产热源,进而产生焦耳热,随着温度的变化,超级螺旋卷绕式复合纤维人工肌肉在径向方向上产生较大的膨胀,纱线的径向膨胀会使这种超级螺旋卷绕式结构发生轴向的收缩。当去除施加电压后,人工肌肉纱线温度会逐渐降低,进而恢复初始状态,循环稳定性良好,如附图3所示。整个驱动过程达到大应变、电热驱动、无污染、环保等目的。这里我们对
比了不同加捻程度下,也就是对比了普通加捻形成螺旋卷绕式结构和超级加捻形成过螺旋结构的情况下输出应变的大小关系。如附图4和图5所示,最大的可达到45%的输出应变。
32.本发明专利所提出的超螺旋结构大应变碳纳米管人工肌肉纱线具有大应变、快速响应的特点。靠电热驱动的碳纳米管纤维复合纱线人工肌肉的设计方法及其性能测试操作简单方便、经济环保、力学强度高、具有较高的稳定性,在施加约10mpa的应力时,超螺旋结构大应变碳纳米管人工肌肉纱线的收缩应变可达到45% ,由于应变的提高,使其在软体驱动器,仿生机械手,康复手套等领域都展现了极大的应用前景。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1