一种SE叠瓦电池电极印刷系统的对位方法与流程
一种se叠瓦电池电极印刷系统的对位方法
技术领域
[0001]
本发明涉及晶体硅太阳能电池电极印刷技术领域,尤其涉及一种se叠瓦电池电极印刷系统的对位方法。
背景技术:
[0002]
传统的太阳能电池片采用金属焊带连接,其容易发生断裂和腐蚀,且焊带占用组件的受光面积;降低了太阳能电池组件的功率。较先进的技术是采用叠瓦的形式进行连接,通过改变电池片间的焊接方式(采用导电胶粘结),相同的组件面积有效增加了电池片的数量,从而提升了组件的功率。
[0003]
对于se电池而言,由于其副栅电极需要印刷至激光槽中,对于印刷精度的要求较高。因此,往往采用双重对位的方式进行对位;其中,第一重对位是指利用硅片表面的激光mark点进行对位,第二重对位则是利用设置在网版的印刷特征点进行对位。常规se电池将印刷特征点隐藏在主栅中,相应的,丝网相机也设置在常规se电池的主栅附近。然而,当采用se电池制作叠瓦电池串时,往往需要对常规se电池的主栅的位置进行移动。因此,如果要将印刷特征点隐藏于主栅当中则需要移动印刷台相机的位置,其难度较高,且需要耗费大量工时,影响产能。若不挪动印刷特征点位置,则特征点会显现在电极图形当中,影响太阳能电池外观。此外,为了提升印刷精度,往往在硅片表面设置多个激光mark点(≥4个),也会降低se叠瓦电池的外观质量,提升其隐裂的风险。
技术实现要素:
[0004]
本发明所要解决的技术问题在于,提供一种se叠瓦电池电极印刷系统的对位方法,其便于丝网相机抓取对位,方便丝网印刷,提升成品外观质量。
[0005]
为了解决上述技术问题,本发明提供了一种se叠瓦电池电极印刷系统的对位方法,所述se叠瓦电池电极印刷系统包括控制器、工作台、设于工作台上方的印刷装置和丝网相机,所述印刷装置包括支撑台和设于所述支撑台上的网版,所述工作台上放置待印刷硅片,所述待印刷硅片表面设有多条相互平行的副栅激光槽以及至少三个激光mark点;
[0006]
所述网版上设有主栅线孔、副栅线孔和防断栅线孔,所述防断栅线孔设于相邻副栅线孔之间且与所述主栅线孔垂直;所述防断栅线孔包括用于丝网相机识别的第一防断栅线孔和第二防断栅线孔;
[0007]
所述对位方法包括:
[0008]
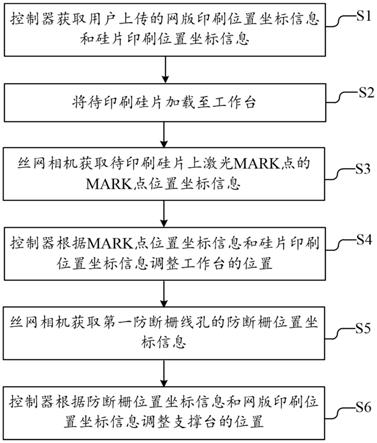
(1)控制器获取用户上传的网版印刷位置坐标信息和硅片印刷位置坐标信息;
[0009]
(2)将待印刷硅片加载至所述工作台;
[0010]
(3)丝网相机获取待印刷硅片上激光mark点的mark点位置坐标信息;
[0011]
(4)控制器根据所述mark点位置坐标信息和硅片印刷位置坐标信息调整所述工作台的位置;
[0012]
(5)丝网相机获取所述第一防断栅线孔的防断栅位置坐标信息;
[0013]
(6)控制器根据所述防断栅位置坐标信息和网版印刷位置坐标信息调整所述支撑台的位置。
[0014]
作为上述技术方案的改进,步骤(4)包括:
[0015]
控制器根据所述mark点位置坐标信息和所述硅片印刷位置坐标信息对所述工作台进行平移;
[0016]
丝网相机获取平移后待印刷硅片上激光mark点的第二mark点位置坐标信息;
[0017]
控制器比较所述第二mark点位置坐标信息和所述硅片印刷位置坐标信息;
[0018]
若所述第二mark点位置坐标信息与所述硅片印刷位置坐标信息相同,则完成所述工作台对位;
[0019]
若所述第二mark点位置坐标信息与所述硅片印刷位置坐标信息不同,则根据所述第二mark点位置坐标信息和硅片印刷位置坐标信息对所述工作台进行旋转,以完成所述工作台对位。
[0020]
作为上述技术方案的改进,控制器根据下述公式组对所述工作台进行平移
[0021]
t
x
=(x
0-x0)
[0022]
t
y
=(y
0-y0)
[0023]
其中,t
x
为工作台在x方向的平移距离,t
y
为工作台在y方向的平移距离;(x0,y0)为硅片印刷位置坐标信息,(x0,y0)为激光mark点的mark点位置坐标信息。
[0024]
作为上述技术方案的改进,所述待印刷硅片表面设有三个激光mark点,其呈直角三角形分布,且直角三角形的直角边与所述待印刷硅片边缘平行。
[0025]
作为上述技术方案的改进,控制器根据下述公式组对所述工作台进行旋转
[0026][0027][0028]
r=|θ-α|
[0029]
其中,r为工作台的旋转角度,(x1,y1)和(x0,y0)为硅片印刷位置坐标信息,(x1,y1)为位于直角顶点位置的激光mark点的第二mark点位置坐标信息,(x2,y2)为位于非直角顶点位置的激光mark点的第二mark点位置坐标信息;α为第一偏转角度,θ为第二偏转角度。
[0030]
作为上述技术方案的改进,控制器根据下述公式组对所述工作台进行旋转
[0031][0032][0033]
r=|β-ω|
[0034]
其中,r为工作台的旋转角度,(x1,y1)和(x0,y0)为硅片印刷位置坐标信息,(x1,y1)为位于非直角顶点位置的激光mark点的第二mark点位置坐标信息,β为第三偏转角度,ω为
第四偏转角度。
[0035]
作为上述技术方案的改进,所述激光mark点呈等腰直角三角形分布。
[0036]
作为上述技术方案的改进,所述网版包括印刷区和支撑区;所述主栅线孔、副栅线孔、防断栅线孔均设于所述印刷区内;
[0037]
所述第一防断栅线孔与所述印刷区边缘之间的距离:所述印刷区的宽度=所=1:(12~20)。
[0038]
作为上述技术方案的改进,位于所述印刷区最外侧的主栅线孔与印刷区边缘之间的距离:印刷区的宽度=1:(4~10)。
[0039]
作为上述技术方案的改进,所述网版上设有四个所述第一防断栅线孔;
[0040]
靠近所述第一防断栅线孔的副栅线孔之间不设置第二防断栅线孔。
[0041]
实施本发明,具有如下有益效果:
[0042]
1.本发明中的se叠瓦电池电极印刷系统,将网版上的第一防断栅线孔作为印刷特征点,其不影响后期丝网相机抓取定位,便于丝网印刷电极结构;同时也避免了印刷特征点影响se叠瓦电池的外观。
[0043]
2.本发明中的se叠瓦电池电极印刷系统,在待印刷硅片表面仅设置三个激光mark点,降低了对硅片的损伤,防止后期切片隐裂;同时通过特定的设置位置和对位方法,有效保障了硅片印刷前的对位,不影响印刷精度;此外,减少激光mark点也提升了se叠瓦电池的外观质量。
[0044]
3.本发明中的se叠瓦电池电极印刷系统的对位方法,首先通过激光mark点对待印刷硅片进行对位,然后通过第一防断栅先孔对网版进行对位;这种对位方式可有效提升印刷精度。并且,通过控制激光mark点的数量,分布位置,有效确保了对位精度。
附图说明
[0045]
图1是本发明一实施例中se叠瓦电池电极印刷系统的示意图;
[0046]
图2是本发明一实施例中待印刷硅片的结构示意图;
[0047]
图3是本发明一实施例中网版的结构示意图;
[0048]
图4是图3中a处的局部放大图;
[0049]
图5是本发明一实施例中se叠瓦电池电极印刷系统对位方法的流程图;
[0050]
图6是本发明一实施例中s4步骤的流程图;
[0051]
图7是本发明一实施例中工作台旋转角度计算方法示意图;
[0052]
图8是本发明另一实施例中工作台旋转角度计算方法示意图。
具体实施方式
[0053]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
[0054]
参考图1,作为本发明的第一个方面,se叠瓦电池电极印刷系统包括控制器、工作台、印刷装置和丝网相机,印刷装置和丝网相机依次设置在工作台的上方;待印刷硅片1放置在工作台上。
[0055]
参考图2,待印刷硅片1的正面设有多条互相平行的副栅激光槽11和至少三个激光
mark点12。激光mark点12的数目可为3个、4个、5个或6个,但不限于此。优选的,在本实施例之中,在待印刷硅片1正面设有三个mark点,且三个mark点呈三角形分布,这种分布形式可有效确定待印刷硅片1与预定印刷位置的偏移,为调整待印刷硅片1的放置角度提供数据基础,确保印刷精度;同时也降低了se叠瓦电池片的损伤,降低后期切片过程中硅片隐裂的几率。此外,减少激光mark点也可提升se叠瓦电池的外观质量,还可缩短激光雕刻时间,提升生产效率。
[0056]
进一步的,三个mark点呈直角三角形分布,且其直角边与硅片的边缘平行,这种分布方式可大幅度简化印刷位置偏移的计算,同时保证印刷对位精度。更进一步的,三个激光mark点呈等腰直角三角形分布,且激光mark点设置在靠近待印刷硅片1的边缘设置,这种设置方式更加便于偏移位置的计算。
[0057]
具体的,本发明中的印刷装置包括支撑台和设于支撑台上的网版2。参考图3,网版包括印刷区和支撑区;支撑区内设有主栅线孔21、副栅线孔22和防断栅线孔23,其中,主栅线孔21与副栅线孔22垂直,与防断栅线孔23平行。防断栅线孔23设于相邻副栅线孔22之间,防断栅线孔23包括第一防断栅线孔231和第二防断栅线孔232。其中,第一防断栅线孔231用于丝网相机识别。本发明通过将第一防断栅孔231作为印刷特征点,一者确保了后续丝网印刷过程的顺利进行;二者避免了印刷特征点外露影响电池成品外观。此外,当普通se电池和se叠瓦电池转产时,无需移动印刷台相机,不影响产能。
[0058]
具体的,参考图4,在本实施例中,第一防断栅线孔231与印刷区边缘之间的距离(l1、l2):印刷区的宽度(d)=1:(10~20),此位置的第一防断栅线孔231可确保丝网相机准确识别。优选的,l1:d=1:(14~18),l2:d=1:(12~16)。
[0059]
具体的,在本实施例中,位于最外侧的主栅线孔21与印刷区边缘之间的距离(l3):印刷区的宽度(d)=1:(4~10),l3>l1和l2。这是由叠瓦电池的主栅电极、副栅电极、防断栅的布置所决定的。优选的,l3:d=1:5,但不限于此。
[0060]
进一步的,为了方便第一防断栅线孔231被丝网相机识别,在本实施例中,靠近第一防断栅线孔231的副栅线孔22之间不设置第二防断栅线孔232。
[0061]
此外,为了方便识别,在印刷区设置四个第一防断栅线孔231,其靠近印刷相机的边缘设置,以方便丝网相机抓取。
[0062]
参考图5,作为本发明的第二方面,提供了一种se叠瓦电池电极印刷系统的对位方法,其包括以下步骤:
[0063]
s1:控制器获取用户上传的网版印刷位置坐标信息和硅片印刷位置坐标信息;
[0064]
具体的,网版印刷位置坐标信息指根据预先的电池电极结构设计所确定的网版位置的坐标。在本实施例中,网版印刷位置坐标信息包括对位后四个印刷特征点(第一防断栅线孔231)的坐标信息,但不限于此。
[0065]
硅片印刷位置坐标信息指根据预先的电池电极结构设计所确定的激光mark点的坐标。在本实施例中,硅片印刷位置坐标信息包括对位后三个激光mark点的坐标信息,但不限于此。
[0066]
s2:将待印刷硅片加载至工作台;
[0067]
具体的,经过扩散、镀膜、激光开槽后的硅片经运输后加载至工作台。
[0068]
s3:丝网相机获取待印刷硅片上激光mark点的mark点位置坐标信息;
[0069]
具体的,mark点位置坐标信息是指加载至工作台的待印刷硅片上激光mark点的实际坐标信息。在本实施例中,其包括三个激光mark点的具体坐标信息,但不限于此。
[0070]
s4:控制器根据mark点位置坐标信息和硅片印刷位置坐标信息调整工作台的位置;
[0071]
具体的,参考图6,s4包括:
[0072]
s41:控制器根据mark点位置坐标信息和硅片印刷位置坐标信息对工作台进行平移;
[0073]
具体的,控制器根据下述公式组对工作台进行平移
[0074]
t
x
=(x
0-x0)
[0075]
t
y
=(y
0-y0)
[0076]
其中,t
x
为工作台在x方向的平移距离,t
y
为工作台在y方向的平移距离;(x0,y0)为硅片印刷位置坐标信息,(x0,y0)为激光mark点的mark点位置坐标信息。
[0077]
优选的,在平移时选取位于非直角顶点位置的激光mark点a0的位置坐标信息为基准,计算平移距离。
[0078]
s42:丝网相机获取平移后待印刷硅片上激光mark点的第二mark点位置坐标信息;
[0079]
具体的,第二mark点位置坐标信息是指平移后待印刷硅片上激光mark点的实际坐标信息。在本实施例中,其包括三个激光mark点的具体坐标信息,但不限于此。
[0080]
s43:判断是否完成对位;
[0081]
具体的,控制器比较第二mark点位置坐标信息和所述硅片印刷位置坐标信息;若所述第二mark点位置坐标信息与所述硅片印刷位置坐标信息相同,则结束所述工作台对位;
[0082]
若所述第二mark点位置坐标信息与所述硅片印刷位置坐标信息不同,则进入步骤s44;
[0083]
s44:根据第二mark点位置坐标信息和硅片印刷位置坐标信息对工作台进行旋转。
[0084]
具体的,参照图7,在本发明的一个实施例之中,控制器根据下述公式组对所述工作台进行旋转
[0085][0086][0087]
r=|θ-α|
[0088]
其中,r为工作台的旋转角度,(x1,y1)和(x0,y0)为硅片印刷位置坐标信息,(x1,y1)为位于直角顶点位置的激光mark点的第二mark点位置坐标信息,(x2,y2)为位于非直角顶点位置的激光mark点的第二mark点位置坐标信息;α为第一偏转角度,θ为第二偏转角度。
[0089]
具体的,α为位于印刷位置的硅片与坐标系之间的偏转角度,其可为任意角度。优选的为0
°
。
[0090]
具体的,参照图7,在旋转时,以a0为旋转中心;同时,a0也是平移时的位置参考点。旋转方向可根据r的正负进行判定,
[0091]
参照图8,在本发明的另一个实施例之中,控制器根据下述公式组对工作台进行旋转
[0092][0093][0094]
r=|β-ω|
[0095]
其中,r为工作台的旋转角度,(x1,y1)和(x0,y0)为硅片印刷位置坐标信息,(x1,y1)为位于直角顶点位置的激光mark点的第二mark点位置坐标信息,β为第三偏转角度,ω为第四偏转角度。
[0096]
具体的,β为位于印刷位置的硅片与坐标系之间的偏转角度,其可为任意角度。优选的为0
°
。
[0097]
具体的,参照图8,在旋转时,以a2为旋转中心;a2是直角三角形a0a1a2的非直角顶点。在平移时,以a0为位置参考点。
[0098]
s5:丝网相机获取第一防断栅线孔的防断栅位置坐标信息;
[0099]
具体的,防断栅位置坐标信息是指网版上第一防断栅线孔的实际坐标信息。在本实施例中,其包括四个防断栅线孔的具体坐标信息,但不限于此。
[0100]
s6:控制器根据防断栅位置坐标信息和网版印刷位置坐标信息调整支撑台的位置。
[0101]
具体的,调整方法可参照现有的mark点对位方式。如cn108493267a所提供的方法。
[0102]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1