一种纳米印刷子版膜定位设备的制作方法
1.本实用新型涉及纳米印刷技术领域,具体为一种纳米印刷子版膜定位设备。
背景技术:
2.纳米图像印刷技术就是将具有纳米凹凸图像的模具作“印版”,用预先涂有聚合物涂层的硅片或玻璃片等作基板(被印物),在相应的设备和器具配合下,通过精确压印并定型以后,再把模具与基板分离开来,现有对于子版膜的定位设备,在定位时需要测量模具的位置及大小,根据模具进行相应的位置固定,操作比较繁琐,而且无法提供稳定的动力输出,不能够快速便捷的实现对子版膜的定位,无法稳定导向对子版膜的夹持方向,影响工作效率,不便于根据模具的位置对子版膜的位置进行调整,增加人员操作,无法稳定实现对子版膜运输距离的定位控制,影响印刷的质量,因此为解决此类问题的一种纳米印刷子版膜定位设备的实现势在必行。
技术实现要素:
3.本实用新型要解决的技术问题是克服现有的缺陷,提供一种纳米印刷子版膜定位设备,快速便捷的实现对子版膜的定位,提高工作效率,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种纳米印刷子版膜定位设备,包括工作台和定位结构;
5.工作台:其下表面四角对称设有支撑腿,工作台的底端设有电机二,工作台的上表面设有凹槽,凹槽的内部底端设有条形滑口,电机二的输出轴穿过工作台底端的通孔并在上端头处设有蜗杆,凹槽的左侧内壁通过轴承转动连接有旋转轴,旋转轴的中部设有蜗轮,蜗轮与蜗杆啮合连接,凹槽的内部通过轴承转动连接有螺杆,螺杆的左端和旋转轴的右端头处均设有齿轮,两个齿轮啮合连接,螺杆的中部螺纹连接有t形块,t形块与凹槽滑动连接,t形块的底端设有电机一;
6.定位结构:包括动力组件、夹持组件和测距组件,动力组件设置于电机一的输出轴上端头处,夹持组件设置于工作台的上表面,测距组件设置于夹持组件的右侧面,动力组件与夹持组件转动连接;
7.其中:还包括plc控制器,所述plc控制器设置于工作台的上表面,plc控制器的输入端电连接外部电源,电机一和电机二的输入端均电连接plc控制器的输出端,提供稳定的动力输出,快速便捷的实现对子版膜的定位,稳定导向对子版膜的夹持方向,提高工作效率,便于根据模具的位置对子版膜的位置进行调整,简化人员操作,稳定实现对子版膜运输距离的定位控制,提高印刷的质量。
8.进一步的,所述动力组件包括圆盘和连杆,所述电机一的输出轴穿过t形块底端的通孔并在上端头处设有圆盘,圆盘的上表面边缘处通过销钉转动连接有前后错位分布的连杆,提供稳定的动力输出,快速便捷的实现对子版膜的定位。
9.进一步的,所述夹持组件包括滑槽、u形板、t形板和条形口,所述滑槽前后对称横
向设置于工作台的上表面,滑槽均与u形板滑动连接,u形板的上表面设有前后对称纵向分布的条形口,条形口的内部均滑动连接有t形板,连杆远离圆盘一侧的外端头均通过销钉与对应的t形板内侧面凸块的通孔转动连接,稳定导向对子版膜的夹持方向,提高工作效率。
10.进一步的,所述测距组件包括l形杆和测距传感器,所述l形杆设置于u形板的横向板体右侧面,l形杆的竖向杆体左侧面设有测距传感器,测距传感器的输出端电连接plc控制器的输入端,便于根据模具的位置对子版膜的位置进行调整,简化人员操作。
11.进一步的,还包括角度传感器,所述角度传感器的输出轴左端头与后侧的齿轮右侧面中心处固定连接,凹槽的后侧内壁设有定位杆,定位杆的前端头与角度传感器的后侧面固定连接,角度传感器的输出端电连接plc控制器的输入端,稳定实现对子版膜运输距离的定位控制,提高印刷的质量。
12.与现有技术相比,本实用新型的有益效果是:本纳米印刷子版膜定位设备,具有以下好处:
13.当需要对纳米印刷机内的子版膜进行定位印刷时,将子版膜水平放置于u形板的上表面,此时通过plc控制器控制电机二开始运转,电机二带动圆盘开始顺时针旋转,由于圆盘的上表面边缘处通过销钉转动连接有前后错位分布的连杆,连杆远离圆盘一侧的外端头均通过销钉与对应的t形板内侧面凸块的通孔转动连接,t形板均与对应的条形口滑动连接,因此在圆盘的顺时针旋转下,带动两个t形板开始相向进行移动,直至两个t形板相对内侧面对称分布的橡胶板内侧面分别与子版膜的前后侧面紧密贴合时,控制电机二停止运转,此时将子版膜稳定的定位至u形板的上表面,完成对子版膜的位置定位夹持,便于对子版膜与模具之间的位置进行调整和移动,简化人员的操作,提高工作效率。
附图说明
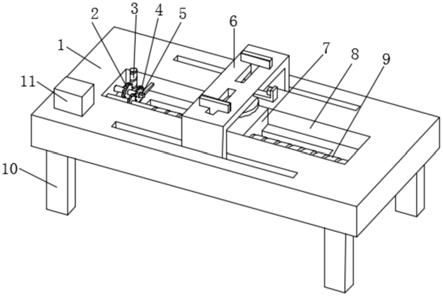
14.图1为本实用新型结构示意图;
15.图2为本实用新型剖面结构示意图;
16.图3为本实用新型a处放大结构示意图;
17.图4为本实用新型定位结构示意图。
18.图中:1工作台、2蜗轮、3蜗杆、4齿轮、5角度传感器、6定位结构、61动力组件、611圆盘、612连杆、62夹持组件、621滑槽、622 u形板、623 t形板、624条形口、63测距组件、631 l形杆、632测距传感器、7 t形块、8凹槽、9螺杆、10支撑腿、11 plc控制器、12电机一、13电机二。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1
‑
4,本实用新型提供一种技术方案:一种纳米印刷子版膜定位设备,包括工作台1和定位结构6;
21.工作台1:其下表面四角对称设有支撑腿10,工作台1的底端设有电机二13,工作台
1的上表面设有凹槽8,凹槽8的内部底端设有条形滑口,电机二13的输出轴穿过工作台1底端的通孔并在上端头处设有蜗杆3,凹槽8的左侧内壁通过轴承转动连接有旋转轴,旋转轴的中部设有蜗轮2,蜗轮2与蜗杆3啮合连接,凹槽8的内部通过轴承转动连接有螺杆9,螺杆9的左端和旋转轴的右端头处均设有齿轮4,两个齿轮4啮合连接,螺杆9的中部螺纹连接有t形块7,t形块7与凹槽8滑动连接,t形块7的底端设有电机一12,利用支撑腿10将工作台1放置于合适的水平工作地面上,控制电机一12运转,电机一12带动蜗杆3开始旋转,由于蜗杆3与蜗轮2啮合连接,因此带动凹槽8左侧内壁转动连接的旋转轴开始旋转,进而由于两个齿轮4啮合连接,因此带动螺杆9开始旋转,由于螺杆9的中部螺纹连接有t形块7,t形块7与凹槽8滑动连接,因此在螺杆9的旋转下,带动t形块7开始在凹槽8的内部进行滑动;
22.定位结构6:包括动力组件61、夹持组件62和测距组件63,动力组件61设置于电机一12的输出轴上端头处,夹持组件62设置于工作台1的上表面,测距组件63设置于夹持组件62的右侧面,动力组件61与夹持组件62转动连接,动力组件61包括圆盘611和连杆612,电机一12的输出轴穿过t形块7底端的通孔并在上端头处设有圆盘611,圆盘611的上表面边缘处通过销钉转动连接有前后错位分布的连杆612,夹持组件62包括滑槽621、u形板622、t形板623和条形口624,滑槽621前后对称横向设置于工作台1的上表面,滑槽621均与u形板622滑动连接,u形板622的上表面设有前后对称纵向分布的条形口624,条形口624的内部均滑动连接有t形板623,连杆612远离圆盘611一侧的外端头均通过销钉与对应的t形板623内侧面凸块的通孔转动连接,测距组件63包括l形杆631和测距传感器632,l形杆631设置于u形板622的横向板体右侧面,l形杆631的竖向杆体左侧面设有测距传感器632,控制电机二13开始运转,电机二13带动圆盘611开始顺时针旋转,由于圆盘611的上表面边缘处通过销钉转动连接有前后错位分布的连杆612,连杆612远离圆盘611一侧的外端头均通过销钉与对应的t形板623内侧面凸块的通孔转动连接,t形板623均与对应的条形口624滑动连接,因此在圆盘611的顺时针旋转下,带动两个t形板623开始相向进行移动,直至两个t形板623相对内侧面对称分布的橡胶板内侧面分别与子版膜的前后侧面紧密贴合,测距传感器632检测与定位完成的子版膜之间的距离,l形杆631起到固定支撑的作用,在t形块7在凹槽8的内部滑动下,带动u形板622开始在滑槽621的内部进行移动,实现对子版膜向工作位置的运输;
23.其中:还包括plc控制器11,plc控制器11设置于工作台1的上表面,plc控制器11的输入端电连接外部电源,电机一12和电机二13的输入端均电连接plc控制器11的输出端,测距传感器632的输出端电连接plc控制器11的输入端,电机一12实现对子版膜的定位夹持,电机二13实现对子版膜的运输移动,测距传感器632实现对子版膜与模具之间的位置计算。
24.其中:还包括角度传感器5,角度传感器5的输出轴左端头与后侧的齿轮4右侧面中心处固定连接,凹槽8的后侧内壁设有定位杆,定位杆的前端头与角度传感器5的后侧面固定连接,角度传感器5的输出端电连接plc控制器11的输入端,角度传感器5实时监测后侧的齿轮4旋转角度,plc控制器11根据测距传感器632与子版膜之间的距离和模具的位置,计算出子版膜的移动距离和所需旋转的角度。
25.在使用时:利用支撑腿10将工作台1放置于合适的水平工作地面上,当需要对纳米印刷机内的子版膜进行定位印刷时,将子版膜水平放置于u形板622的上表面,此时通过plc控制器11控制电机二13开始运转,电机二13带动圆盘611开始顺时针旋转,由于圆盘611的上表面边缘处通过销钉转动连接有前后错位分布的连杆612,连杆612远离圆盘611一侧的
外端头均通过销钉与对应的t形板623内侧面凸块的通孔转动连接,t形板623均与对应的条形口624滑动连接,因此在圆盘611的顺时针旋转下,带动两个t形板623开始相向进行移动,直至两个t形板623相对内侧面对称分布的橡胶板内侧面分别与子版膜的前后侧面紧密贴合时,控制电机二13停止运转,此时将子版膜稳定的定位至u形板622的上表面,同时测距传感器632检测与定位完成的子版膜之间的距离,并将距离信息传输至plc控制器11,l形杆631起到固定支撑的作用,plc控制器11根据模具的位置开始控制电机一12运转,电机一12带动蜗杆3开始旋转,由于蜗杆3与蜗轮2啮合连接,因此带动凹槽8左侧内壁转动连接的旋转轴开始旋转,进而由于两个齿轮4啮合连接,因此带动螺杆9开始旋转,由于螺杆9的中部螺纹连接有t形块7,t形块7与凹槽8滑动连接,因此在螺杆9的旋转下,带动t形块7开始在凹槽8的内部进行滑动,进而带动u形板622开始在滑槽621的内部进行移动,实现对子版膜向工作位置的运输,同时角度传感器5实时监测后侧的齿轮4旋转角度,plc控制器11根据测距传感器632与子版膜之间的距离和模具的位置,计算出子版膜的移动距离和所需旋转的角度,当后侧的齿轮4旋转角度旋转至计算出的数值后,角度传感器5发出信号给plc控制器11,plc控制器11控制电机一12停止运转,即完成对子版膜向工作位置的运输,实现对子版膜的稳定定位。
26.值得注意的是,本实施例中所公开的plc控制器11具体型号为西门子s7
‑
200,电机一12和电机二13均可选用东莞市威邦机电有限公司,型号为5ik150gu
‑
s3f的电机,角度传感器5可选用日机自动化设备(深圳)有限公司,型号为cp
‑
2fb
‑
6的角度传感器,测距传感器632可选用深圳市佰誉达科技有限公司,型号为a111的测距传感器,plc控制器11控制电机一12、电机二13、角度传感器5和测距传感器632工作均采用现有技术中常用的方法。
27.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1