用于虚拟装甲车辆的控制器的制作方法
1.本发明涉及用于控制虚拟式车辆的外围输入/输出装置,尤其涉及用于虚拟式装甲车辆的游戏或训练控制器。
背景技术:
2.从当前技术水平已知用于虚拟飞机和机动化轮式车辆的不同控制器。这些控制器最初不是设计成控制虚拟装甲车辆及其枪炮。
3.计算机键盘和计算机鼠标—或者单独地或者组合地—可以用作游戏控制器。然而,通过这些控制器控制虚拟车辆存在一定的困难和不便,因为这些装置原本是为其他目的而设计的,而通过计算机键盘和计算机鼠标控制虚拟车辆是不方便的,并且限制了用户的能力、准确性和响应速度。
4.存在用于虚拟车辆的简单控制设备、例如游戏手柄和操纵杆—即在飞行模拟器中使用的控制器,以及具有踏板的方向舵—即在汽车模拟器中使用的控制器。然而,这些装置也在一定程度上是专业化的,并且它们作为用于控制虚拟装甲车辆的游戏控制器的使用也带来某些不便和控制困难、枪支制导的准确性和反应速度。
5.已知军事装备模拟器的控制器和控制旋钮,例如afv sim公司的装置(https://www.afvsim.com/product/)。然而,这些装置旨在用于训练机械驾驶员和战斗单元的射击者。因此,它们高度专用于装甲车辆的每个特定型号,并且它们具有有限的功能。
技术实现要素:
6.本发明的目的是为使用者提供一种用于虚拟式装甲车辆的方便的控制器,主要是提供一种用于引导虚拟使装甲车辆的枪炮并跟踪虚拟目标的方便的装置。
7.该特定目的通过创建本发明的控制器来实现。本发明是一种用于虚拟式装甲车辆的控制器,它包括:具有枢轴的固定式基座(底座);壳体,该壳体通过位于该固定式基座的枢轴上并允许壳体相对于固定式基座旋转的旋转机构与所述固定式基座相关联;左、右手柄,这些手柄通过公共轴相连,该公共轴穿过该壳体并且其自身具有允许倾斜这些手柄的独立旋转机构;其中,壳体的旋转机构和轴的独立旋转机构设置有用于当不存在由使用者产生的压力时使壳体和轴返回到中心位置的机构;枢轴和带有手柄的公共轴的旋转传感器或编码器;功能性地连接所述旋转传感器或编码器的微控制器;用于使微控制器与主机设备通信的装置;以及电源。
8.所给定的特征组合提供的技术效果是:由于双手控制而增加了在长时间使用控制器期间的舒适度,由于两个轴的独立操作而实现了更精确的瞄准,通过控制旋转速度而不是虚拟枪炮的视野的绝对位置实现了平滑地跟踪虚拟目标的能力。
9.在本发明的另一方面,使用磁性和磁阻传感器—包括编码器和电位计以及光编码器来作为壳体和公共轴的旋转传感器。
10.在本发明的另一方面中,上文所述的控制器另外还包括基于参考电压源用于控制
器的模拟部分的专用线路(电路)。
11.在本发明的另一方面,控制器的壳体和机械零件完全由金属制成。
12.在本发明的另一方面,控制器的所有活动的(运动的)机械部件都配备有轴承或减摩衬套,或者包含润滑剂。
13.在本发明的另一方面中,控制器的壳体配备有具有可指定(可分配)功能的输入和输出装置。
14.在本发明的另一方面,输入和输出装置包括按钮、拨动开关、开关、显示器、触摸面板和led。
15.在本发明的另一方面,主机设备选自计算机、游戏控制台、平板电脑或智能手机。
16.在本发明的另一方面,微控制器通过数据交换协议连接到主机设备,所述数据交换协议选自usb协议、fireware协议(火线协议)、thunderbolt协议(雷电协议)、tcp-ip协议、蓝牙协议或wi-fi协议。
附图说明
17.下面将参照附图更详细地解释本发明,附图仅用于说明性目的而不限制本发明的范围。
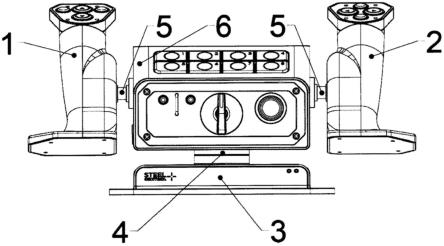
18.图1、2和3分别以正视图、顶视图和侧视图示出了本发明的控制器的示意图。使用以下附图标记:1和2-分别为右和左手柄;3-固定基座;4-旋转机构;5-其上固定有手柄的公共轴;6-壳体。
19.图4、5和6分别示出了不带壳体的本发明的控制器的机械部件的正视图、顶视图和侧视图,其包括具有枢轴的固定基座、具有手柄和旋转机构的轴,包括用于使壳体和轴返回到中心位置的机构,以及在本发明的实施例中的壳体和轴的旋转传感器,包括磁阻旋转传感器。使用以下附图标记:1和2-分别为右和左手柄;3-固定基座;5-其上固定有手柄的公共轴;7-固定基座的枢轴,控制器的壳体在该枢轴上旋转;8-传感器;9-磁体。
具体实施方式
20.本发明的控制器包括具有枢轴的固定基座和通过位于固定基座的枢轴上的旋转机构与该固定基座相关联的壳体,以及通过公共轴相连的左和右手柄,所述公共轴穿过壳体并且具有自己的独立旋转机构。此外,壳体的旋转机构和轴的独立旋转机构设置有用于在没有使用者施加的压力的情况下使壳体和轴返回中心位置的机构。控制器的壳体具有左右旋转的能力,手柄具有前后旋转的能力,用于使壳体和轴返回的机构使所述壳体和手柄返回中心位置。
21.藉由双手操作虚拟装甲车辆的枪炮和虚拟装甲车辆本身,以及当施加使壳体及轴从中心位置移位的压力时由用于使壳体及轴返回中心位置的机构所产生的反向压力的存在,使得使用者能容易且顺利地操作虚拟装甲车辆的枪炮以及虚拟装甲车辆本身。它还允许使用者精确地且准确地将枪炮指向虚拟目标,并使其停留。因此,实现了高效的虚拟战斗和目标战胜。
22.为了从旋转轴获取读数,该控制器使用旋转传感器。作为旋转传感器,可以使用各种角度传感器,包括磁性和磁阻传感器、电位计、光编码器和本领域技术人员已知的其它类
型的传感器。优选地,与径向磁化磁体相结合地使用磁阻传感器。该传感器和磁体是同轴的,元件之一位于壳体上,第二个元件位于移动轴之一上。使用这种类型的工程解决方案允许完全摆脱机械磨损,并且使控制过程安静和舒适。优选地,使用将传感器和运算放大器组合在单个壳体中的旋转传感器。
23.通过其中枪炮的水平和竖直旋转速度分别对应于控制器的壳体和具有手柄的轴的旋转角度的系统的使用,本发明的控制器允许像在真实车辆上那样停留于虚拟目标。可定制的灵敏度曲线和在战斗中直接切换它们的能力允许用户在任何情况下高效地摧毁敌方虚拟装甲车辆。
24.本发明的控制器还包括微控制器,优选地为高性能微控制器。关于控制器的壳体和具有手柄的轴的旋转角度的信息被传输到微控制器,并由微控制器本身或借助于主机设备软件分别转换成枪炮的水平和竖直旋转速度。优选地,微控制器具有fpu支持。它允许用户以最小的延迟实现枪炮的高指向精度。
25.本发明的控制器配备有具有可分配功能的附加控制元件,即输入和输出装置,从而允许使用者利用一个装置扮演车辆的任何乘员角色。所述输入和输出装置位于控制器的壳体和手柄处。所述输入和输出装置包括按钮、拨动开关、显示器、触摸面板和led。
26.此外,本发明的控制器的动态加载设置和功能的灵活模型允许使用者在各种平台上和各种游戏中应用该控制器。本发明的控制器还可用作真实装甲车辆的射击者的训练模拟器中的控制器。换句话说,本发明的控制器是适用于各种系统和配置的通用装置。
27.各种装置系统的电源电路是彼此隔离的。优选基于参考电压源将专用线路用于装置的模拟部分,以便提供控制器与任何主机设备的精确操作。
28.控制器的壳体和机械零件可以由合适的塑料或金属制成。优选使用金属来制成机械部件。最优选的控制器实施方式是其中控制器的壳体和机械零件完全由金属制成。
29.为了提供容易且平稳的运行,控制器的所有活动的机械部件都装备有轴承或减摩衬套,或者包含润滑剂。
30.可以将计算机—个人计算机或模拟器计算机、游戏控制台、平板电脑或智能手机用作主机设备。
31.微控制器与主机设备的通信通过有线或无线方法来执行。优选地,通过从usb协议、fireware协议、thunderbolt协议、tcp-ip协议、蓝牙协议或wi-fi协议中选择的数据交换协议使微控制器与主机设备通信。
32.本发明的控制器如下工作:将该装置安装在桌子的表面上,并且通过有线或使用无线技术使该装置与主机设备连接。在主机设备上运行必要的软件。如有必要,使用者将功能分配给在各种虚拟装甲车辆控制模式(枪炮手模式、驾驶员模式等)中使用所必需的所有或一些输入和输出装置(按钮、拨动开关、开关)。
33.在枪炮手模式中,使用者将他的手放在控制器的手柄(1,2)上。如果需要虚拟枪炮进行水平指向,则握住手柄(1,2)的使用者使壳体(6)相对于基座(3)围绕枢轴(4)旋转在这种情况下所需的角度。如果需要虚拟枪炮进行竖直指向,则使用者使手柄(1,2)绕轴(5)的轴线倾斜。一旦不再需要使虚拟枪炮的视野进行水平和/或竖直指向,使用者就释放手柄(1,2),并且用于使壳体和轴返回的机构独立地使装该置返回到中心的原始位置。
34.尽管已经参照优选实施例详细描述了本发明,但本领域技术人员清楚的是,可以
进行各种替换并且可以使用各种等效方案,这些替换和等效方案不在由所附权利要求限定的本发明的范围之外。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1