面向机械臂遥操作的压力模拟训练方法及装置与流程
1.本发明涉及航空航天技术领域,特别涉及一种基于视频语音的面向机械臂遥操作的压力模拟训练方法及装置。
背景技术:
2.机械臂遥操作在阶段任务中起着重要作用,虽然随着航天技术不断发展,空间机器人的自动化水平逐渐提高,但在一些对精度要求较高的领域,操作人员的加入必不可少。因此,对操作人员预先进行机械臂遥操作的模拟训练至关重要。
3.然而,相关技术中的训练方法仅考虑训练人员对机械臂遥操作的熟练程度,并未考虑压力对于训练人员完成遥操作任务的影响,亟待解决。
技术实现要素:
4.本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
5.为此,本发明的一个目的在于提出一种基于视频语音的面向机械臂遥操作的压力模拟训练方法,可以对训练人员进行不同压力下的机械臂遥操作训练,提高训练人员在不同压力下的操作水平。
6.本发明的另一个目的在于提出一种基于视频语音的面向机械臂遥操作的压力模拟训练装置。
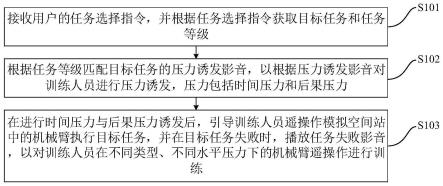
7.为达到上述目的,本发明一方面实施例提出了一种基于视频语音的面向机械臂遥操作的压力模拟训练方法,包括以下步骤:接收用户的任务选择指令,并根据所述任务选择指令获取目标任务和任务等级;根据所述任务等级匹配所述目标任务的压力诱发影音,以根据所述压力诱发影音对所述训练人员进行压力诱发,所述压力包括时间压力和后果压力;在进行所述时间压力与所述后果压力诱发后,引导所述训练人员遥操作模拟的机械臂执行所述目标任务,并在所述目标任务失败时,播放任务失败影音,以对所述训练人员在不同类型、不同水平压力下的机械臂遥操作进行训练。
8.本发明实施例的基于视频语音的面向机械臂遥操作的压力模拟训练方法,根据训练人员的任务等级匹配对应的压力诱发影音,以对训练人员进行相应程度的压力诱发,可以对训练人员在不同类型、不同水平压力下的机械臂遥操作进行训练,从而可以提高训练人员的压力适用能力,并提高训练人员在不同压力下的操作水平。
9.另外,根据本发明上述实施例的基于视频语音的面向机械臂遥操作的压力模拟训练方法还可以具有以下附加的技术特征:
10.进一步地,所述根据所述任务等级匹配所述目标任务的压力诱发影音,包括:根据所述任务等级确定所述目标任务的时间压力等级和后果压力等级;根据所述时间压力等级获取所述目标任务的任务时间,根据所述后果压力等级确定任务失误和任务失败时的绩效酬金扣除规则和扣分规则、以及任务绩效成绩公布规则和任务失败影音;将所述任务时间、所述绩效酬金扣除规则、所述扣分规则和所述任务绩效成绩公布规则转换成压力诱发语
音,并根据所述压力诱发语音和所述任务失败影音组成所述压力诱发影音。
11.进一步地,所述时间压力等级包括第一至第三时间压力等级,所述后果压力等级包括第一至第三后果压力等级,其中,第三时间压力等级的时间压力大于第二时间压力等级,所述第二时间压力等级的时间压力大于第一时间压力等级;第三后果压力等级的后果压力大于第二后果压力等级,所述第二后果压力等级大于第一后果压力等级。
12.进一步地,还包括:获取所述训练人员在当前时间压力等级和当前后果压力等级下完成任务的实际时长;判断所述实际时长是否大于第一阈值,或者,小于第二阈值,其中,所述第一阈值大于所述第二阈值;如果大于所述第一阈值,则降低所述当前时间压力等级和/或当前后果压力等级,如果小于所述第二阈值,则提高所述当前时间压力等级和/或当前后果压力等级。
13.进一步地,在接收用户的任务选择指令之前,还包括:识别所述训练人员的身份标识信息;根据所述身份标识信息检测身份标识与任务等级数据库中所述训练人员完成所述目标任务的最高等级;根据所述最高等级匹配所述目标任务的压力诱发影音,以根据压力诱发影音对所述训练人员进行操作前的压力诱发。
14.为达到上述目的,本发明另一方面实施例提出了一种基于视频语音的面向机械臂遥操作的压力模拟训练装置,包括:第一获取模块,用于接收用户的任务选择指令,并根据所述任务选择指令获取目标任务和任务等级;压力诱发模块,用于根据所述任务等级匹配所述目标任务的压力诱发影音,以根据所述压力诱发影音对所述训练人员进行压力诱发,所述压力包括时间压力和后果压力;训练模块,用于在进行所述时间压力与所述后果压力诱发后,引导所述训练人员遥操作模拟中的机械臂执行所述目标任务,并在所述目标任务失败时,播放任务失败影音,以对所述训练人员在不同类型、不同水平压力下的机械臂遥操作进行训练。
15.本发明实施例的基于视频语音的面向机械臂遥操作的压力模拟训练装置,根据训练人员的任务等级匹配对应的压力诱发影音,以对训练人员进行相应程度的压力诱发,可以对训练人员在不同类型、不同水平压力下的机械臂遥操作进行训练,从而可以提高训练人员的压力适用能力,并提高训练人员在不同压力下的操作水平。
16.另外,根据本发明上述实施例的基于视频语音的面向机械臂遥操作的压力模拟训练装置还可以具有以下附加的技术特征:
17.进一步地,所述压力诱发模块包括:第一确定单元,用于根据所述任务等级确定所述目标任务的时间压力等级和后果压力等级;第二确定单元,用于根据所述时间压力等级获取所述目标任务的任务时间,根据所述后果压力等级确定任务失误和任务失败时的绩效酬金扣除规则和扣分规则、以及任务绩效成绩公布规则和任务失败影音;转换单元,用于将所述任务时间、所述绩效酬金扣除规则、所述扣分规则和所述任务绩效成绩公布规则转换成压力诱发语音,并根据所述压力诱发语音和所述任务失败影音组成所述压力诱发影音。
18.进一步地,所述时间压力等级包括第一至第三时间压力等级,所述后果压力等级包括第一至第三后果压力等级,其中,第三时间压力等级的时间压力大于第二时间压力等级,所述第二时间压力等级的时间压力大于第一时间压力等级;第三后果压力等级的后果压力大于第二后果压力等级,所述第二后果压力等级大于第一后果压力等级。
19.进一步地,还包括:第二获取模块,用于获取所述训练人员在当前时间压力等级和
当前后果压力等级下完成任务的实际时长;判断模块,用于判断所述实际时长是否大于第一阈值,或者,小于第二阈值,其中,所述第一阈值大于所述第二阈值;压力自适应模块,用于在大于所述第一阈值时,降低所述当前时间压力等级和/或当前后果压力等级,在小于所述第二阈值时,提高所述当前时间压力等级和/或当前后果压力等级。
20.进一步地,还包括:识别模块,用于在接收用户的任务选择指令之前,识别所述训练人员的身份标识信息;检测模块,用于根据所述身份标识信息检测身份标识与任务等级数据库中所述训练人员完成所述目标任务的最高等级;所述压力诱发模块还用于根据所述最高等级匹配所述目标任务的压力诱发影音,以根据压力诱发影音对所述训练人员进行操作前的压力诱发。
21.本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
22.本发明上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
23.图1为根据本发明一个实施例的基于视频语音的面向机械臂遥操作的压力模拟训练方法的流程图;
24.图2为根据本发明一个实施例的基于视频语音的面向机械臂遥操作的压力模拟训练装置的方框示意图。
具体实施方式
25.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
26.本发明是基于发明人对以下问题的认识和发现做出的:
27.机械臂遥操作在阶段任务中起着重要作用,虽然随着航天技术不断发展,空间机器人的自动化水平逐渐提高,但在一些对精度要求较高的领域,操作人员的加入必不可少,然而,由于人员的特殊性复杂性,可能导致操作失误,造成人误。有研究显示,压力是导致人误的重要原因,因此,研究在压力情境下人因失误情况对于航天任务完成具有重大意义。
28.时间压力为通过完成任务的客观时间限制引起个体对时间压力的主观体验或心理状态。目前现有研究中时间压力的主要诱导方法是计算无时间压力下训练人员完成给定任务的平均时间,以及训练人员完成任务的标准差,以平均值-标准差作为任务时间限制,不同训练人员对时间压力的感知能力是不同的,这种统一限定时长的方式无法很好地诱发出每位训练人员的时间压力。此外,现有压力诱发方法没有考虑个体对压力的适应能力。
29.后果压力指的是由于训练人员对任务后果(主要是失败)可能对社会、他人以及个体产生的影响,从而引发个体的主观体验或心理状态,主要强调由于对任务后果的担心而导致的心理和生理压力。目前现有研究中的后果压力大多采用包括使用噪声刺激、任务材料、社会评价、演讲等方式诱发个体对任务失败引发后果的压力,但是已有的时间及后果压力诱发方式不足以诱发在机械臂遥操作任务中的时间及后果压力。
30.针对诱发机械臂遥操作任务情境中时间及后果压力的问题,本发明实施例提出了一种基于视频语音的机械臂遥操作的压力模拟训练方法及装置,通过任务情境创设,设置任务时间限制,搭配屏幕画面及相应噪声,绩效酬金挂钩,公布绩效成绩等方式以诱发在机械臂遥操作这一特定任务中的时间及后果压力,从而可以对训练人员进行不同压力下的机械臂遥操作训练,提高训练人员在不同压力下的操作水平。
31.下面参照附图描述根据本发明实施例提出的基于视频语音的面向机械臂遥操作的压力模拟训练方法及装置,首先将参照附图描述根据本发明实施例提出的基于视频语音的面向机械臂遥操作的压力模拟训练方法。
32.图1是本发明一个实施例的基于视频语音的面向机械臂遥操作的压力模拟训练方法的流程图。
33.如图1所示,该基于视频语音的面向机械臂遥操作的压力模拟训练方法包括以下步骤:
34.在步骤s101中,接收用户的任务选择指令,并根据任务选择指令获取目标任务和任务等级。
35.需要说明的是,本发明实施例的应用场景可以包括应激(压力)情景下的训练、人员选拔和测评等。
36.其中,目标任务可以为的任一任务;任务等级可以根据用户的选择确定,也可以根据目标任务确定,对此不做具体限定。
37.例如,目标任务可以为遥操作机械臂修复太阳能电池板,则在获取到该任务时,可以同时选择任务的等级;并在获取到目标任务之后,电脑屏幕呈现舱内画面,随后显示陨石碎片撞击画面,以模拟任务情景。
38.在步骤s102中,根据任务等级匹配目标任务的压力诱发影音,以根据压力诱发影音对训练人员进行压力诱发,压力包括时间压力和后果压力。
39.其中,压力诱发影音包括压力诱发语音和任务失败影音,用于对训练人员进行压力诱发。
40.在本实施例中,根据任务等级匹配目标任务的压力诱发影音,包括:根据任务等级确定目标任务的时间压力等级和后果压力等级;根据时间压力等级获取目标任务的任务时间,根据后果压力等级确定任务失误和任务失败时的绩效酬金扣除规则和扣分规则、以及任务绩效成绩公布规则和任务失败影音;将任务时间、绩效酬金扣除规则、扣分规则和任务绩效成绩公布规则转换成压力诱发语音,并根据压力诱发语音和任务失败影音组成压力诱发影音。
41.可以理解的是,在具体应用于时,本发明实施例可以通过画面指导语发布任务,通过文字阐明当下任务背景及未能完成任务的后果,不同任务情境的情境创设严重程度不同、时间限制情况不同、绩效酬金挂钩程度不同、绩效成绩公布情况不同;并提示若未能完成任务将会出现的画面,比如,播放舱体爆炸的画面及音效等。
42.需要说明的是,由于不同的时间压力等级和后果压力等级对应不同的任务时间、绩效酬金扣除规则、扣分规则和任务绩效成绩公布规则,且不同的后果压力等级也对应着不同的任务失败影音;因此,本发明实施例需要根据任务等级确定时间压力等级和后果压力等级,以进行相应的压力诱发。
43.其中,本发明实施例可以预先建立任务等级与时间压力等级和后果压力等级的对应关系,以根据对应关系确定任务等级对应的时间压力等级和后果压力等级。
44.在本实施例中,时间压力等级包括第一至第三时间压力等级,后果压力等级包括第一至第三后果压力等级,第三时间压力等级的时间压力大于第二时间压力等级,第二时间压力等级的时间压力大于第一时间压力等级;第三后果压力等级的后果压力大于第二后果压力等级,第二后果压力等级大于第一后果压力等级。
45.其中,任务等级可以包括第一至第九任务等级,具体如下:
46.(1)第一任务等级可以包括第一时间压力等级和第一后果压力等级,第一任务等级对应的压力为:无时间压力无后果压力情境,本发明实施例可以通过文字和语音的方式进行压力诱发,例如,无时间压力无后果压力情境指导语可以为:
[0047]“这里是云霄一号控制中心,03号操作员请注意,十秒前有一块陨石碎片刮蹭到了左侧太阳能电池板,请你立刻操作机械臂配合舱外人员进行检查。”,并提示被试此情境任务操作过程中若出现失误不会扣除酬金,任务绩效成绩最终也不会公布。
[0048]
(2)第二任务等级可以包括第一时间压力等级和第二后果压力等级,第二任务等级对应的压力为:无时间压力低后果压力情境,本发明实施例可以通过文字和语音的方式进行压力诱发,例如,无时间压力低后果压力情境指导语为:
[0049]“这里是云霄一号控制中心,03号操作员请注意,十秒前因陨石碎片撞击导致科研设备舱壁破裂,舱内气体泄漏,若不完成修补将会造成价值1亿的设备损失(你的酬金也会受到任务过程中的失误情况以及任务完成情况的一个影响,每次失误均会在原先酬金水平基础上降低5元),请你立刻操作机械臂配合舱外人员进行维修,祝你凯旋!”,并提示被试此情境任务操作过程中若出现失误会扣除一定的酬金,任务绩效最终也会公布,小失误扣1分,任务失败扣5分。
[0050]
(3)第三任务等级可以包括第一时间压力等级和第三后果压力等级,第三任务等级对应的压力为:无时间压力高后果压力情境,本发明实施例可以通过文字和语音的方式进行压力诱发,例如,无时间压力高后果压力情境指导语为:
[0051]“这里是云霄一号控制中心,03号操作员请注意,十秒前因陨石碎片撞击导致科研设备舱壁破裂,舱内气体泄漏,若不完成修补将会造成舱体爆炸、价值10亿的设备损失、严重的人员伤亡(你的酬金也会受到任务过程中的失误情况以及任务完成情况的一个影响,每次失误均会在原先酬金水平基础上降低10元),请你立刻操作机械臂配合舱外人员进行维修,祝你凯旋!”,并提示被试此情境任务操作过程中若出现失误会扣除更多的酬金,任务绩效最终也会公布,小失误扣2分,任务失败扣10分。
[0052]
需要说明的是,在以下低时间压力的情境中,任务时长限制可以为所有测试人员在无时间压力情境的实验下任务完成时长的平均值。
[0053]
(4)第四任务等级可以包括第二时间压力等级和第一后果压力等级,第四任务等级对应的压力为:低时间压力无后果压力情景,本发明实施例可以通过文字和语音的方式进行压力诱发,例如,低时间压力无后果压力情境指导语为:
[0054]“这里是云霄一号控制中心,03号操作员请注意,十秒前因陨石碎片撞击导致生活保障舱壁破裂,请你立刻操作机械臂配合舱外人员进行维修,任务时限为5分钟,祝你凯旋!”,并提示被试此情境任务操作过程中若出现失误不会扣除酬金,任务绩效成绩最终也
不会公布。
[0055]
(5)第五任务等级可以包括第二时间压力等级和第二后果压力等级,第五任务等级对应的压力为:低时间压力低后果压力情境,本发明实施例可以通过文字和语音的方式进行压力诱发,例如,低时间压力低后果压力情境指导语为:
[0056]“这里是云霄一号控制中心,03号操作员请注意,十秒前因陨石碎片撞击导致科研设备舱壁破裂,舱内气体缓慢泄漏中,若5分钟内无法完成修补将会造成价值1亿的设备损失(你的酬金也会受到任务过程中的失误情况以及任务完成情况的影响,每次失误均会在原先酬金水平基础上降低5元),祝你凯旋!”,并提示被试此情境任务操作过程中若出现失误会扣除一定的酬金,任务绩效最终也会公布,小失误扣1分,任务失败扣5分。
[0057]
(6)第六任务等级可以包括第二时间压力等级和第三后果压力等级,第六任务等级对应的压力为:低时间压力高后果压力情境,本发明实施例可以通过文字和语音的方式进行压力诱发,例如,低时间压力高后果压力情境指导语为:
[0058]“这里是云霄一号控制中心,03号操作员请注意,十秒前因陨石碎片撞击导致科研设备舱壁破裂,舱内气体缓慢泄漏中,若5分钟内无法完成修补将会造成舱体爆炸、价值10亿的设备损失、严重的人员伤亡(你的酬金也会受到任务过程中的失误情况以及任务完成情况的影响,每次失误均会在原先酬金水平基础上降低10元),请你立刻操作机械臂配合舱外人员进行维修,祝你凯旋!”,并提示被试此情境任务操作过程中若出现失误会扣除一定的酬金,任务绩效最终也会公布,小失误扣2分,任务失败扣10分。
[0059]
需要说明的是,在以下高时间压力的情境中,任务时长限制为所有测试人员在无时间压力情境下的实验下任务完成时长的平均值*60%。
[0060]
(7)第七任务等级可以包括第三时间压力等级和第一后果压力等级,第七任务等级对应的压力为:高时间压力无后果压力情境,本发明实施例可以通过文字和语音的方式进行压力诱发,例如,高时间压力无后果压力情境指导语为:
[0061]“这里是云霄一号控制中心,03号操作员请注意,十秒前因陨石碎片撞击导致生活保障舱壁破裂,请你立刻操作机械臂配合舱外人员进行维修,此次任务非常紧急,时限为3分钟,祝你凯旋!”,并提示被试此情境任务操作过程中若出现失误不会扣除酬金,任务绩效成绩最终也不会公布。
[0062]
(8)第八任务等级可以包括第三时间压力等级和第二后果压力等级,第八任务等级对应的压力为:高时间压力低后果压力情境,本发明实施例可以通过文字和语音的方式进行压力诱发,例如,高时间压力低后果压力情境指导语为:
[0063]“这里是云霄一号控制中心,03号操作员请注意,十秒前因陨石碎片撞击导致科研设备舱壁破裂,舱内气体快速泄漏中,若3分钟内无法完成修补将会造成价值1亿的设备损失(你的酬金也会受到任务过程中的失误情况以及任务完成情况的影响,每次失误均会在原先酬金水平基础上降低5元),请你立刻操作机械臂配合舱外人员进行维修,祝你凯旋!”,并提示被试此情境任务操作过程中若出现失误会扣除一定的酬金,任务绩效最终也会公布,小失误扣1分,任务失败扣5分。
[0064]
(9)第九任务等级可以包括第三时间压力等级和第三后果压力等级,第九任务等级对应的压力为:高时间压力低后果压力情境,本发明实施例可以通过文字和语音的方式进行压力诱发,例如,高时间压力高后果压力情境指导语为:“这里是云霄一号控制中心,03
号操作员请注意,十秒前因陨石碎片撞击导致科研设备舱壁破裂,舱内气体快速泄漏中,若3分钟内无法完成修补将会造成舱体爆炸、价值10亿的设备损失、严重的人员伤亡(你的酬金也会受到任务过程中的失误情况以及任务完成情况的影响,每次失误均会在原先酬金水平基础上降低10元),请你立刻操作机械臂配合舱外人员进行维修,祝你凯旋!”,并提示被试此情境任务操作过程中若出现失误会扣除一定的酬金,任务绩效最终也会公布,小失误扣2分,任务失败扣10分。
[0065]
需要说明的是,任务等级的高低可以具体设置,比如,从第一至第九任务等级的等级依次增高,第九任务等级为最高等级;再比如,任务等级的从最低值最高的排序可以为:第一任务等级、第二任务等级、第四任务等级、第五任务等级、第三任务等级、第七任务等级、第六任务等级、第九任务等级;对此不作具体限定。
[0066]
进一步地,在通过指导语发布任务,通过文字阐明当下任务背景、是否有时间限制、未能完成任务的后果之后,本发明实施例还提示若未能完成任务将会出现的画面,比如,播放舱体爆炸的画面及音效。其中,三种后果压力情境分别播放不同的任务失败后果,其中,无后果压力情境任务失败时呈现任务失败的画面,比如,无噪声、无动态画面;低后果压力情境任务失败时呈现舱内气体泄漏的画面并伴随舱内气体泄漏噪声;高后果压力情境任务失败时呈现舱体爆炸画面并伴随爆炸噪声。
[0067]
在步骤s103中,在进行时间压力与后果压力诱发后,引导训练人员遥操作模拟中的机械臂执行目标任务,并在目标任务失败时,播放任务失败影音,以对训练人员在不同类型、不同水平压力下的机械臂遥操作进行训练。
[0068]
可以理解的是,本发明实施例可以通过指导语发布任务,并提示若未能完成任务将会出现的画面之后,引导训练人员想象,即进行时间压力与后果压力诱发,诱发时长可以设置为预设时长,可以根据压力诱发的需求进行设置,比如,可以设置为5分钟,不做具体限定。然后,训练人员开始机械臂遥操作任务,并在用于诱发压力的显示屏上显示时间进度;根据任务完成情况及压力情境类型播放不同的任务结束画面。
[0069]
由此,本发明实施例可以基于任务情境的时间及后果压力诱发进行机械臂遥操作训练,充分考虑任务的舱内和舱外特点,且时间压力诱发方面,相对与现有的统一设置时长限定的方法,可以有效解决不同训练人员对时间压力感知存在个体差异的问题;后果压力诱发方面,相对于现有的纯噪声刺激、任务材料、社会评价、演讲等方法,本发明实施例对于压力情境下机械臂遥操作任务相关研究具有更强的适用性,并使用情境化任务来诱发航天任务时间后果压力,并且采用有效方法引导训练人员进入操作人员角色;同时压力等级的划分更加细致,可以有效满足不同训练人员的压力训练需求。
[0070]
在一些实施例中,还包括:获取训练人员在当前时间压力等级和当前后果压力等级下完成任务的实际时长;判断实际时长是否大于第一阈值,或者,小于第二阈值;如果大于第一阈值,则降低当前时间压力等级和/或当前后果压力等级,如果小于第二阈值,则提高当前时间压力等级和/或当前后果压力等级。
[0071]
其中,第一阈值大于第二阈值,第一阈值大于第二阈值可以预先进行标定,不做具体限定。
[0072]
可以理解的是,本发明实施例可以根据任务完成时间确定当前压力等级是否是否合适,比如,如果训练人员在当前压力等级下任务完成时间较短,则表示训练人员可以轻松
适应当前压力等级,可以适当提高压力等级,如果任务完成时间较长或者没有完成任务,则表示训练人员无法适应当前压力等级,可以适当降低压力等级。从而可以针对人员对压力的适应能力,设置了时间限制阈值自适应调整机制,以通过立了个性化、自适应的压力诱发,有效确保个体的时间压力保持相对稳定,提高训练的有效性和智能性,提高训练人员的训练效果。
[0073]
在一些实施例中,在接收用户的任务选择指令之前,还包括:识别训练人员的身份标识信息;根据身份标识信息检测身份标识与任务等级数据库中训练人员完成目标任务的最高等级;根据最高等级匹配目标任务的压力诱发影音,以根据压力诱发影音对训练人员进行操作前的压力诱发。
[0074]
可以理解的是,本技术实施例可以预先建立身份标识与任务等级数据库,并记录训练人员训练过程中的训练数据,从而可以在训练人员选择任务等级之前,根据训练数据自动匹配训练人员所能完成的最高压力等级任务,以节约训练人员选择所需的时间,提高训练的智能性,提升用户的使用体验。
[0075]
下面将通过具体示例对基于视频语音的机械臂遥操作的压力模拟训练方法进行阐述,本发明实施例可以通过e-prime3.0编写情境程序,通过创设任务突发情境、设置个性化任务时长限制、任务失败后果画面及噪声刺激、绩效酬金挂钩、公布成绩等方式,实现机械臂遥操作任务研究的时间及后果压力的诱发,具体如下:
[0076]
步骤一:播放任务情境画面
[0077]
实验室内设置两个屏幕,一个进行机械臂遥操作任务,一个用于呈现诱发训练人员产生压力的画面。训练人员进入实验室,坐在电脑前熟悉周围环境。实验人员向训练人员简要介绍任务内容,训练人员阅读并签署知情同意书。在培训完机械臂遥操作仿真平台手柄控制后,打开e-prime程序,在用于诱发压力的屏幕上呈现遭受陨石碎片撞击画面。
[0078]
步骤二:播放情境指导语
[0079]
在不同的时间及后果压力任务情境中播放不同的指导语,包括:无时间压力无后果压力任务情境指导语,无时间压力低后果压力任务情境指导语,无时间压力高后果压力任务情境指导语,低时间压力无后果压力任务情境指导语,低时间压力低后果压力任务情境指导语,低时间压力高后果压力任务情境指导语画面,高时间压力无后果压力任务情境指导语,高时间压力低后果压力任务情境指导语,高时间压力高后果压力任务情境指导语。
[0080]
步骤三:提示如果任务失败将会出现的画面
[0081]
按照实验需求分别播放不同的画面,无后果压力的三个任务情境中任务失败时呈现任务失败的画面,比如,无噪声、无动态画面;低后果压力的三个任务情境任务失败时呈现舱内气体泄漏的画面并伴随舱内气体泄漏噪声;高后果压力的三个任务情境任务失败时呈现舱体爆炸画面并伴随爆炸噪声。
[0082]
步骤四:引导训练人员想象
[0083]
通过上述情境和指导语介绍之后,引导训练人员想象自己就是舱内机械臂操作者人员,进入任务情境。要求训练人员屏蔽其它因素,集中注意力于自己的情境任务人员想象。该步骤可以持续约5分钟。
[0084]
步骤五:进入机械臂遥操作程序
[0085]
在无时间压力的3个任务情境中,训练人员在进行机械臂操作时,任务情境屏幕上
呈现正向计时状态,在有时间压力的6个任务情境中,训练人员在进行机械臂操作时,任务情境屏幕上呈现倒计时状态。
[0086]
步骤六:根据机械臂遥操作任务完成情况播放任务结果画面,若任务成功完成,或是该任务情境没有后果压力,则播放无噪声、无动态画面;若任务未能完成,在有低后果压力的情境中,则播放舱内气体泄漏画面并伴随气体泄漏噪声画面,在有高后果压力的情境中,播放舱体爆炸画面并伴随舱体爆炸噪画面。
[0087]
根据本发明实施例提出的基于视频语音的面向机械臂遥操作的压力模拟训练方法,根据训练人员的任务等级匹配对应的压力诱发影音,以对训练人员进行相应程度的压力诱发,可以对训练人员在不同类型、不同水平压力下的机械臂遥操作进行训练,从而可以提高训练人员的压力适用能力,并提高训练人员在不同压力下的操作水平。
[0088]
其次参照附图描述根据本发明实施例提出的基于视频语音的面向机械臂遥操作的压力模拟训练装置。
[0089]
图2是本发明一个实施例的基于视频语音的面向机械臂遥操作的压力模拟训练装置的方框示意图。
[0090]
如图2所示,该基于视频语音的面向机械臂遥操作的压力模拟训练装置10包括:第一获取模块100、压力诱发模块200和训练模块300。
[0091]
其中,第一获取模块100用于接收用户的任务选择指令,并根据任务选择指令获取目标任务和任务等级;压力诱发模块200用于根据任务等级匹配目标任务的压力诱发影音,以根据压力诱发影音对训练人员进行压力诱发,压力包括时间压力和后果压力;训练模块300用于在进行时间压力与后果压力诱发后,引导训练人员遥操作模拟中的机械臂执行目标任务,并在目标任务失败时,播放任务失败影音,以对训练人员在不同类型、不同水平压力下的机械臂遥操作进行训练。
[0092]
进一步地,压力诱发模块200包括:第一确定单元、第二确定单元、转换单元。其中,第一确定单元,用于根据任务等级确定目标任务的时间压力等级和后果压力等级;第二确定单元,用于根据时间压力等级获取目标任务的任务时间,根据后果压力等级确定任务失误和任务失败时的绩效酬金扣除规则和扣分规则、以及任务绩效成绩公布规则和任务失败影音;转换单元,用于将任务时间、绩效酬金扣除规则、扣分规则和任务绩效成绩公布规则转换成压力诱发语音,并根据压力诱发语音和任务失败影音组成压力诱发影音。
[0093]
进一步地,时间压力等级包括第一至第三时间压力等级,后果压力等级包括第一至第三后果压力等级,其中,第三时间压力等级的时间压力大于第二时间压力等级,第二时间压力等级的时间压力大于第一时间压力等级;第三后果压力等级的后果压力大于第二后果压力等级,第二后果压力等级大于第一后果压力等级。
[0094]
进一步地,本发明实施例的装置10还包括:第二获取模块、判断模块和压力自适应模块。其中,第二获取模块,用于获取训练人员在当前时间压力等级和当前后果压力等级下完成任务的实际时长;判断模块,用于判断实际时长是否大于第一阈值,或者,小于第二阈值,其中,第一阈值大于第二阈值;压力自适应模块,用于在大于第一阈值时,降低当前时间压力等级和/或当前后果压力等级,在小于第二阈值时,提高当前时间压力等级和/或当前后果压力等级。
[0095]
进一步地,本发明实施例的装置10还包括:识别模块和检测模块。其中,识别模块,
用于在接收用户的任务选择指令之前,识别训练人员的身份标识信息;检测模块,用于根据身份标识信息检测身份标识与任务等级数据库中训练人员完成目标任务的最高等级;压力诱发模块200还用于根据最高等级匹配目标任务的压力诱发影音,以根据压力诱发影音对训练人员进行操作前的压力诱发。
[0096]
需要说明的是,前述对基于视频语音的面向机械臂遥操作的压力模拟训练方法实施例的解释说明也适用于该实施例的基于视频语音的面向机械臂遥操作的压力模拟训练装置,此处不再赘述。
[0097]
根据本发明实施例提出的基于视频语音的面向机械臂遥操作的压力模拟训练装置,根据训练人员的任务等级匹配对应的压力诱发影音,以对训练人员进行相应程度的压力诱发,可以对训练人员在不同压力下的机械臂遥操作进行训练,从而可以提高训练人员的压力适用能力,并提高训练人员在不同类型、不同水平压力下的操作水平。
[0098]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0099]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不是必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0100]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1