单通道式介入手术模拟装置及模拟控制方法与流程
1.本发明涉及一种介入手术的仿真模拟装置,还涉及一种基于该模拟装置的控制方法。
背景技术:
2.介入手术是一种常见的外科微创手术,主要用于冠脉急性闭塞、冠脉慢性闭塞、脑血管堵塞、脑血管瘤、胸主动脉瘤、下肢狭窄等手术,手术难度大,对医生的技能要求高。
3.手术中用到器具主要包括导管、支架和导丝等。导管最先进入体内,导丝和支架都在导管内部;导丝在支架的支撑下沿导管行走,作为核心操作器具到达目标位置,进行相应的操作。
4.为了辅助医生进行双导丝介入手术练习,积累操作经验,提高操作水平,需要一种能够模拟介入式手术的装置。该装置必须能够将导丝引入到通道中,并且实现对导管、支架和导丝等器具进行检测。现有技术中尚没有这种装置,无法达到模拟训练的目的。
技术实现要素:
5.本发明提出了一种单通道式介入手术模拟装置及模拟控制方法,其目的是:提供一种介入手术模拟装置,能够将导丝引入到通道中,并对导管、支架和导丝进行检测,为模拟训练提供反馈数据。
6.本发明技术方案如下:一种单通道式介入手术模拟装置,包括基体,所述基体上设有若干检测工位,各检测工位上分别设有作为介入手术器具行走通道的介入通道,各检测工位处还分别设有用于检测经过的介入手术器具的检测组件;所述检测工位包括入口检测工位、中间检测工位和末端检测工位;所述入口检测工位的介入通道通过一连接管组件与中间检测工位的介入通道的后端相连通;所述中间检测工位的介入通道的前端通过一连接管组件与末端检测工位的介入通道的后端相连通;所述连接管组件为伸缩式。
7.作为上述模拟装置的进一步改进:各检测工位分别设有一作为所述检测组件的直径检测机构;所述直径检测机构包括编码器、转动块和复位弹簧;所述编码器安装在基体上,所述转动块安装在编码器的转动轴上;所述介入通道上设有开口,所述转动块位于该开口处;所述转动块上设有第一伸出部;所述复位弹簧与所述转动块相连接,用于推动转动块旋转以使第一伸出部与介入通道上位于开口对侧的内壁部分相接触。
8.作为上述模拟装置的进一步改进:至少一个检测工位上设置有用于模拟斑块阻碍的夹紧机构;所述夹紧机构包括安装在介入通道底部的贯通孔中的活动触块和用于推动活动触块向上移动的推动机构。
9.作为上述模拟装置的进一步改进:所述推动机构包括推杆电机、连接杆、转动连接块和柔性的顶头;所述推杆电机安装在基体上,所述转动连接块通过转动配合安装在基体上;所述连接杆一端与推杆电机的伸缩杆转动连接、另一端与转动连接块的一端转动连接,所述柔性顶头安装在转动连接块的另一端且用于与活动触块的底部相接触。
10.作为上述模拟装置的进一步改进:所述中间检测工位和末端检测工位中至少有一处的检测组件包括直径检测机构、用于检测介入通道中的介入手术器具的位移和/或转动角度的移动状态检测装置以及用于模拟斑块阻碍的夹紧机构;所述直径检测机构包括编码器、转动块和复位弹簧;所述编码器安装在基体上,所述转动块安装在编码器的转动轴上;所述介入通道上设有开口,所述转动块位于该开口处;所述转动块上设有第一伸出部;所述复位弹簧与所述转动块相连接,用于推动转动块旋转以使第一伸出部与介入通道上位于开口对侧的内壁部分相接触;所述移动状态检测装置的检测点与夹紧机构的夹紧点分别位于所述开口的两侧。
11.作为上述模拟装置的进一步改进:所述连接管组件包括内管、外管、定位套和压缩弹簧;所述内管的前端插入所述外管的后端,所述定位套固定在内管的外壁上,所述压缩弹簧前端与所述外管的后端面相接触、后端与所述定位套的前端面相接触。
12.本发明还提供了一种基于上述模拟装置的模拟控制方法,步骤为:步骤1、位于入口检测工位的检测组件检测是否有导管插入并检测插入的导管直径是否满足要求,满足要求后转入步骤2;步骤2、等待沿导管进入的导丝经中间检测工位到达末端检测工位,末端检测工位的检测组件检测到导丝且导丝的直径满足要求后,转入步骤3;步骤3、中间检测工位等待与导丝相对应的支架到达,并检测支架的直径是否满足要求;上述步骤执行过程中,检测组件将检测到的数据实时发送至上位机,上位机将检测数据与预设的手术数据对比,判断是否满足要求。
13.作为上述控制方法的进一步改进:如果上位机得到的检测数据的顺序与步骤1至3不符,或上位机在获得检测数据后的判断结果为不满足要求,则上位机发出警报,提示操作错误。
14.作为上述控制方法的进一步改进:至少一处检测工位处还设有用于模拟斑块阻碍的夹紧机构;当上位机检测到介入手术器具到达预设的斑块位置时,控制对应的夹紧机构将该处的介入通道中的介入手术器具夹紧,模拟介入手术器具遇到斑块的情景。
15.相对于现有技术,本发明具有以下有益效果:(1)本装置能够将导丝引入到通道中,模拟介入手术操作,使导丝插入操作的手感贴合临床,并进一步在不同的工位设置检测组件,对导管、支架和导丝分别进行独立的检测,达到仿真模拟训练目的;(2)对于直径较小的导丝,合理布置夹紧机构、直径检测机构和移动状态检测装置的相对位置,避免夹紧机构动作时影响移动状态检测装置的检测。
附图说明
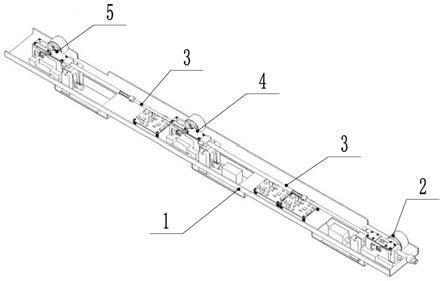
16.图1为本装置的整体结构示意图;图2为本装置的入口检测工位的检测组件及对应的夹紧机构的结构示意图;图3为中间检测组件/末端检测组件部分及对应的夹紧模拟机构部分的结构示意图;图4为连接管组件的结构示意图;图5为连接管组件的爆炸图。
具体实施方式
17.下面结合附图详细说明本发明的技术方案:如图1,一种单通道式介入手术模拟装置及模拟控制方法,包括由cnc加工的金属架体所构成的基体1,所述基体1上设有三个检测工位,分别是入口检测工位2、中间检测工位4和末端检测工位5。参考图2和图3,各检测工位上分别设有作为介入手术器具行走通道的介入通道100,同时各检测工位处还分别设有用于检测经过的介入手术器具的检测组件。
18.本实施例中,所述介入通道100都是由基体1上的底座顶部的通槽与位于通槽上方的盖板所围成的。
19.如图1,所述入口检测工位2的介入通道100通过一连接管组件3与中间检测工位4的介入通道100的后端相连通;所述中间检测工位4的介入通道100的前端通过一连接管组件3与末端检测工位5的介入通道100的后端相连通。
20.所述连接管组件3为伸缩式。如图4和5,所述连接管组件3包括内管3
‑
1、外管3
‑
4、定位套3
‑
2和压缩弹簧3
‑
3;所述内管3
‑
1的前端插入所述外管3
‑
4的后端,所述定位套3
‑
2刚刚侧方的紧定螺钉固定在内管3
‑
1的外壁上,所述压缩弹簧3
‑
3前端与所述外管3
‑
4的后端面相接触、后端与所述定位套3
‑
2的前端面相接触。安装时,先缩短连接管组件3的长度,将前后两端分别对准前后通道,然后逐渐松开,使连接管组件3伸长,完成安装。伸缩式的结构可以降低安装难度,不必将基体1拆开即可完成安装。
21.如图2和3,各检测工位分别设有一直径检测机构(检测组件之一);所述直径检测机构包括编码器200
‑
1、转动块200
‑
2和复位弹簧200
‑
3。
22.所述编码器200
‑
1为绝对式,安装在基体1上,所述转动块200
‑
2安装在编码器200
‑
1的转动轴上。
23.所述介入通道100上设有开口,所述转动块200
‑
2位于该开口处。所述转动块200
‑
2上设有第一伸出部和第二伸出部。所述复位弹簧200
‑
3上端与所述转动块200
‑
2的第二伸出部的底部相接触,下端套装在基体1上的定位柱上,用于推动转动块200
‑
2旋转以使第一伸出部与介入通道100上位于开口对侧的内壁部分相接触。进一步的,所述基体1上并排设有两个以上的定位柱,方便调整复位弹簧200
‑
3的位置。
24.优选的,所述第一伸出部朝向所述介入通道100的出口端伸出,第一伸出部上设有朝向介入通道100入口端一侧的斜面。在导丝和导管进入介入通道100时,前端先触碰到该斜面,直接推动转动块200
‑
2旋转,减小了二者相对运动的阻力。
25.所述第一伸出部的末端还设有圆角,避免导丝、导管经过第一伸出部末端时被划伤。
26.当导管、导丝等器具经过第一伸出部2时,会推动转动块200
‑
2旋转,并穿过介入通道100。在复位弹簧200
‑
3的作用下,第一伸出部始终向上转动,与顶部的盖板一同夹住器具,第一伸出部与盖板之间的间隙即为器具的直径,而该间隙大小同时还决定了转动块200
‑
2的角度位置,因此通过编码器200
‑
1获得转动块200
‑
2的转动角度,就可以进一步根据转动块200
‑
2的转角与插入的导丝、导管的直径之间的对应关系,得到直径尺寸。
27.一种可实现的直径计算方法为:事先记录初始时转动块200
‑
2的斜面相对于介入通道100的倾斜角度,再结合导丝穿过后转动块200
‑
2所转过的角度以及部件的尺寸,通过几何计算,得到器具的直径。
28.另一方面,由于直径的规格是有限的,所以还可以事先将不同直径的器具插入到介入通道100中,记录转动块200
‑
2转过的角度,将直径与角度对应起来构建查询表,然后在模拟操作中,通过查表法快速获得直径尺寸。
29.在临床手术过程中,导管、导丝经常会遇到血管中的斑块受阻。很多经验不够丰富的医生在刚遇到这类情况时,常因为手感的突然变化导致情绪波动,出现误操作。为了模拟遇到斑块的情景,本装置还加入了夹紧机构,让训练的医生可以体验、熟悉这种情况下的手感,在临床状态下遇到类似情况时,可以更从容的面对。
30.如图2和3,所述夹紧机构同样设置在检测工位附近,包括安装在介入通道100底部的贯通孔中的活动触块300
‑
5和用于推动活动触块300
‑
5向上移动的推动机构。具体的,所述推动机构包括推杆电机300
‑
1、连接杆300
‑
2、转动连接块300
‑
3和柔性的顶头300
‑
4。
31.所述推杆电机300
‑
1水平安装在基体1上,所述转动连接块300
‑
3通过转动轴安装在基体1上。所述连接杆300
‑
2一端与推杆电机300
‑
1的伸缩杆转动连接、另一端与转动连接块300
‑
3的一端转动连接,所述柔性的顶头300
‑
4通过螺钉安装在转动连接块300
‑
3的另一端且用于与活动触块300
‑
5的底部相接触。
32.当推杆电机300
‑
1伸长时,转动连接块300
‑
3转动,顶头300
‑
4向上移动,将活动触块300
‑
5顶起,与介入通道100上壁一同夹住导管或导丝,模拟遇到斑块的情景。推杆电机300
‑
1缩短时,顶头300
‑
4下落,活动触块300
‑
5在重力作用下自动下落,松开导丝或导管。
33.推杆电机300
‑
1的额定推力为60n。通过调节推杆电机300
‑
1输入电压的大小,改变输出推力,进而控制活动触块300
‑
5向上升的推力,达到调节夹紧力度的目的。
34.所述检测工位处的检测组件还包括用于检测介入通道100中的介入手术器具的位移和/或转动角度的移动状态检测装置400。本实施例中,采用vl53l1x激光测距传感器来检测导丝、导管等在介入通道100中的移动速度、位移以及转动角度。还可以采用其它检测机构,比如公告号为cn109730779a的中国发明专利《一种血管介入手术机器人导管导丝协同控制系统及方法》所使用的操作信息采集单元。
35.如图2,入口检测工位2检测的是导管,由于导管直径最大,刚度较好,因此即使夹紧机构夹紧导管,导管也不会发生较大的偏移,导致此处的移动状态检测装置400(尤其是非接触式的,图中未示)的检测出现误差。但是,如图3,在中间检测工位4和末端检测工位5,情况有所不同。如果夹紧机构临近移动状态检测装置400,由于导丝非常细,夹紧机构夹住导丝后,导丝会发生较大的偏移,很容易导致移动状态检测装置400的检测结果出现明显的误差。为了解决这个问题,在中间检测工位4和末端检测工位5,需要将移动状态检测装置400的检测点与夹紧机构的夹紧点分别设置在所述开口的两侧,靠直径检测机构的转动块
200
‑
2自动轻微地夹住导丝,将夹紧机构与移动状态检测装置400隔离开,保证转动块200
‑
2前侧的导丝始终是稳定的,不会随夹紧机构的动作而抖动,消除检测误差。
36.模拟控制方法的步骤为:步骤1、位于入口检测工位2的直径检测机构是否有导管插入并检测插入的导管直径是否满足要求(即判定检测到的直径数据与预设的直径数据之间的差值是否超过可接受的范围),满足要求后转入步骤2。
37.步骤2、等待沿导管进入的导丝经中间检测工位4(途经时可以提前做直径检测和斑块的模拟夹紧)到达末端检测工位5,末端检测工位5的检测组件检测到导丝且导丝的直径满足要求后,转入步骤3。
38.步骤3、中间检测工位4等待与导丝相对应的支架到达,并检测支架的直径是否满足要求。
39.上述步骤执行过程中,直径检测机构会将检测到的数据实时发送至上位机,上位机将直径检测值与预设的数据对比,判断是否满足要求。如果上位机得到的检测数据的顺序与步骤1至3不符,或上位机在获得检测数据后的判断结果为不满足要求,则上位机发出警报,提示操作错误。
40.另一方面,当上位机检测到介入手术器具到达预设的斑块位置时,可以控制对应的夹紧机构将该处的介入通道100中的介入手术器具夹紧,模拟介入手术器具遇到斑块的情景。
41.操作过程中,移动状态检测装置400可以实时检测导丝、导管等在介入通道100中的移动速度、位移以及转动角度。显然,结合直径检测机构得到的直径数据,上位机可以判断出当前移动状态检测装置400检测的是哪一类介入器具的相关数据。得到的速度、位移和转动角度,可以作为上位机的显示内容,供医生参考,还可以进一步地基于这些数据,计算出导丝等在人体内的运行轨迹和位置,叠加到心脑血管组织图像中并显示于屏幕,供操作者进行感知对比,达到仿真模拟训练目的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1