模拟肛门括约肌复合体应力的方法和装置
1.本公开涉及计算机技术领域,具体涉及模拟肛门括约肌复合体应力的方法和装置。
背景技术:
2.肛门失禁是肛瘘术后最严重的后遗症,尤其是高位复杂性肛瘘手术因破坏了肛门括约肌而导致不同程度肛门功能受损,所以手术时对肛门括约肌的处理至关重要。目前临床对于穿越肛门括约肌以上的高位肛瘘,临床医生在手术时主要根据影像学资料及自身经验,采用挂线疗法。临床上准确评估肛门括约肌损伤程度、权衡肛瘘切开术与挂线术的利弊,恰当地应用挂线疗法,进一步规范挂线、挂线的部位、肌肉挂线的厚度、松紧度及线脱落时间,既不盲目挂线又要兼顾保护肛门功能及患者的舒适度,对治疗肛瘘具有重要意义,急需采用现代技术进行深入细致研究。
技术实现要素:
3.为了解决相关技术中的问题,本公开实施例提供模拟肛门括约肌复合体应力的方法和装置。
4.第一方面,本公开实施例中提供了一种模拟肛门括约肌复合体应力的方法,包括:
5.基于骨盆ct数据和肛门括约肌复合体肌群mr数据构建肛门括约肌复合体模型,其中,所述肛门括约肌复合体模型包括肛门括约肌复合体圆孔;
6.在有限元仿真系统中获取所述肛门括约肌复合体模型;
7.在所述有限元仿真系统中创建解析刚体,所述解析刚体包括圆柱部分,和与圆柱部分连接的半球部分;
8.在所述有限元仿真系统中使所述解析刚体穿过所述肛门括约肌复合体圆孔,获得所述肛门括约肌复合体的应力。
9.结合第一方面,本公开在第一方面的第一种实现方式中,所述解析刚体的圆柱部分和半球部分的直径为13mm-15mm。
10.结合第一方面,本公开在第一方面的第二种实现方式中,所述解析刚体的弹性模量为0.95kpa,泊松比为0.45,密度为1.12e-9
kg/mm3。
11.结合第一方面、第一方面的第一种实现方式和第一方面的第二种实现方式中的任一项,本公开在第一方面的第三种实现方式中,在所述有限元仿真系统中使所述解析刚体穿过所述肛门括约肌复合体圆孔之前,还包括:
12.在所述有限元仿真系统中将所述肛门括约肌复合体模型和所述解析刚体转化为实例;
13.在所述有限元仿真系统中使所述肛门括约肌复合体模型和所述解析刚体处于临近位置,所述解析刚体为接触主面,所述肛门括约肌复合体为接触负面,设定接触属性为摩擦接触,接触类型为面面接触;
14.在所述有限元仿真系统中定义边界条件,约束所述肛门括约肌复合体两侧面的六个自由度。
15.结合第一方面、第一方面的第一种实现方式和第一方面的第二种实现方式中的任一项,本公开在第一方面的第四种实现方式中,在所述有限元仿真系统中使所述解析刚体穿过所述肛门括约肌复合体圆孔之前,还包括:
16.对所述肛门括约肌复合体进行网格划分,所述网格属性为四面体自由化网格,所述网格的单元类型为显式非线性单元类型。
17.结合第一方面,本公开在第一方面的第五种实现方式中,所述在所述有限元仿真系统中使所述解析刚体穿过所述肛门括约肌复合体圆孔,获得所述肛门括约肌复合体的应力包括:
18.旋转所述解析刚体使其轴线方向与所述肛门括约肌复合体圆孔相垂直;
19.使所述解析刚体沿z轴向下移动穿过所述肛门括约肌复合体圆孔。
20.结合第一方面,本公开在第一方面的第六种实现方式中,所述基于骨盆ct数据和肛门括约肌复合体肌群mr数据构建肛门括约肌复合体模型包括:
21.对所述骨盆ct数据和肛门括约肌复合体肌群mr数据通过数据读入、图像定位、图像筛选和区域增长处理,得到肛门括约肌复合体全局几何模型;
22.将所述肛门括约肌复合体全局几何模型转化为实体,从所述实体中选择从肛缘处外括约肌皮下部到肛门括约肌复合体下缘之间的肌肉组织得到所述肛门括约肌复合体模型。
23.结合第一方面的第六种实现方式,本公开在第一方面的第七种实现方式中,所述图像筛选包括将勾勒的肛门括约肌复合体组织从复杂图像中筛选出来;所述区域增长用于分割出肛门括约肌复合体肌组织。
24.接和第一方面的第六种实现方式,本公开在第一方面的第八种实现方式中,在所述将所述全局几何模型转化为实体之前,还包括对所述肛门括约肌复合体全局几何模型进行三维有限元前处理。
25.第二方面,本公开实施例中提供了一种模拟肛门括约肌复合体应力的装置,包括:
26.模型构建单元,被配置为基于骨盆ct数据和肛门括约肌复合体肌群mr数据构建肛门括约肌复合体模型,其中,所述肛门括约肌复合体模型包括肛门括约肌复合体圆孔;
27.应力模拟单元,被配置为在有限元仿真系统中获取所述肛门括约肌复合体模型数据;在所述有限元仿真系统中创建解析刚体,所述解析刚体包括圆柱部分,和与圆柱部分连接的半球部分;并在所述有限元仿真系统中使所述解析刚体穿过所述肛门括约肌复合体圆孔,获得所述肛门括约肌复合体的应力。
28.结合第二方面,本公开在第二方面的第一种实现方式中,所述解析刚体的圆柱部分和半球部分的直径为13mm-15mm。
29.结合第二方面,本公开在第二方面的第二种实现方式中,所述解析刚体的弹性模量为0.95kpa,泊松比为0.45,密度为1.12e-9
kg/mm3。
30.结合第二方面、第二方面的第一种实现方式和第二方面的第二种实现方式中的任一项,本公开在第二方面的第三种实现方式中,在所述有限元仿真系统中使所述解析刚体穿过所述肛门括约肌复合体圆孔之前,还包括:
31.在所述有限元仿真系统中将所述肛门括约肌复合体模型和所述解析刚体转化为实例;
32.在所述有限元仿真系统中使所述肛门括约肌复合体模型和所述解析刚体处于临近位置,所述解析刚体为接触主面,所述肛门括约肌复合体为接触负面,设定接触属性为摩擦接触,接触类型为面面接触;
33.在所述有限元仿真系统中定义边界条件,约束所述肛门括约肌复合体两侧面的六个自由度。
34.结合第二方面、第二方面的第一种实现方式和第二方面的第二种实现方式中的任一项,本公开在第二方面的第四种实现方式中,在所述有限元仿真系统中使所述解析刚体穿过所述肛门括约肌复合体圆孔之前,还包括:
35.对所述肛门括约肌复合体进行网格划分,所述网格属性为四面体自由化网格,所述网格的单元类型为显式非线性单元类型。
36.结合第二方面,本公开在第二方面的第五种实现方式中,所述在所述有限元仿真系统中使所述解析刚体穿过所述肛门括约肌复合体圆孔,获得所述肛门括约肌复合体的应力包括:
37.旋转所述解析刚体使其轴线方向与所述肛门括约肌复合体圆孔相垂直;
38.使所述解析刚体沿z轴向下移动穿过所述肛门括约肌复合体圆孔。
39.结合第二方面,本公开在第二方面的第六种实现方式中,所述基于骨盆ct数据和肛门括约肌复合体肌群mr数据构建肛门括约肌复合体模型包括:
40.对所述骨盆ct数据和肛门括约肌复合体肌群mr数据通过数据读入、图像定位、图像筛选和区域增长处理,得到肛门括约肌复合体全局几何模型;
41.将所述肛门括约肌复合体全局几何模型转化为实体,从所述实体中选择从肛缘处外括约肌皮下部到肛门括约肌复合体下缘之间的肌肉组织得到所述肛门括约肌复合体模型。
42.结合第二方面的第六种实现方式,本公开在第二方面的第七种实现方式中,所述图像筛选包括将勾勒的肛门括约肌复合体组织从复杂图像中筛选出来;所述区域增长用于分割出肛门括约肌复合体肌组织。
43.结合第二方面的第六种实现方式,本公开在第二方面的第八种实现方式中,在所述将所述全局几何模型转化为实体之前,还包括对所述肛门括约肌复合体全局几何模型进行三维有限元前处理。
44.本公开实施例提供的技术方案可以包括以下有益效果:
45.根据本公开实施例提供的技术方案,通过无创检查结合有限元模型模拟肛门括约肌复合体的应力,能够更加直观地从力学角度认识肛门括约肌复合体的力学特性及其损伤导致肛门失禁的发病机制,为盆底功能障碍性疾病尤其是因肛周肌肉组织导致控便功能障碍的发生机制提供了生物力学基础,为如中医挂线疗法等肛萎诊疗方案的制定和定量手术的实施提供了理论支持。
46.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
附图说明
47.结合附图,通过以下非限制性实施方式的详细描述,本公开的其它特征、目的和优点将变得更加明显。在附图中:
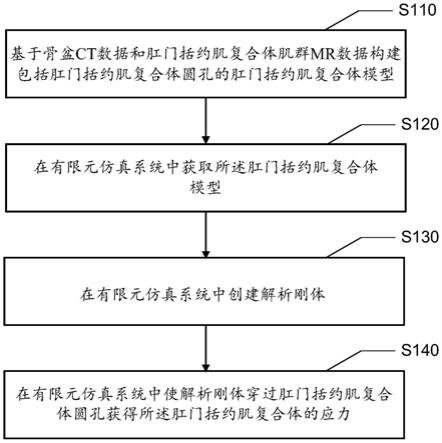
48.图1示出根据本公开实施例的模拟肛门括约肌复合体应力的流程图;
49.图2a示出根据本公开实施例的ct扫描的扫描参数图;
50.图2b示出根据本公开实施例的mr扫描的扫描参数图;
51.图3示出根据本公开实施例的基于骨盆ct数据和肛门括约肌复合体肌群mr数据构建肛门括约肌复合体模型的流程图;
52.图4a示出根据本公开实施例的经过三维有限元前处理后的肛门括约肌复合体全局几何模型的示意图;
53.图4b示出图4a所示全局几何模型的局部放大图;
54.图5示出根据本公开实施例得到的肛门括约肌复合体模型的示意图;
55.图6示出根据本公开实施例创建的解析刚体的示意图;
56.图7示出根据本公开一实施方式在有限元仿真系统中对肛门括约肌复合体模型和解析刚体进行配置的流程图;
57.图8示出根据本公开一实施方式在有限元仿真系统中设置肛门括约肌复合体模型和解析刚体的接触属性后的模型示意图;
58.图9示出根据本公开一实施方式在有限元仿真系统中对肛门括约肌复合体模型约束了两侧面后的模型示意图;
59.图10示出了根据本公开一实施方式模拟得到的肛门括约肌复合体的应力曲线和应力值的示意图;
60.图11示出了根据本公开的实施例的模拟肛门括约肌复合体应力装置的结构框图。
具体实施方式
61.下文中,将参考附图详细描述本公开的示例性实施例,以使本领域技术人员可容易地实现它们。此外,为了清楚起见,在附图中省略了与描述示例性实施例无关的部分。
62.在本公开中,应理解,诸如“包括”或“具有”等的术语旨在指示本说明书中所公开的特征、数字、步骤、行为、部件、部分或其组合的存在,并且不欲排除一个或多个其他特征、数字、步骤、行为、部件、部分或其组合存在或被添加的可能性。
63.另外还需要说明的是,在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本公开。
64.上文提及,目前临床对于穿越肛门括约肌以上的高位肛瘘,临床医生在手术时主要根据影像学资料及自身经验,采用挂线疗法。临床上准确评估肛门括约肌损伤程度、权衡肛瘘切开术与挂线术的利弊,恰当地应用挂线疗法,进一步规范挂线、挂线的部位、肌肉挂线的厚度、松紧度及线脱落时间,既不盲目挂线又要兼顾保护肛门功能及患者的舒适度,对治疗肛瘘具有重要意义,急需采用现代技术进行深入细致研究。
65.鉴于以上情況,本公开提出了一种模拟肛门括约肌复合体应力的方法。
66.图1示出根据本公开实施例的模拟肛门括约肌复合体应力的流程图,如图1所示,所述模拟肛门括约肌复合体应力的方法包括步骤s110
–
s140:
67.在步骤s110中,基于骨盆ct数据和肛门括约肌复合体肌群mr数据构建包括肛门括约肌复合体圆孔的肛门括约肌复合体模型;
68.在步骤s120中,在有限元仿真系统中获取所述肛门括约肌复合体模型;
69.在步骤s130中,在所述有限元仿真系统中创建解析刚体;
70.在步骤s140中,在所述有限元仿真系统中使所述解析刚体穿过所述肛门括约肌复合体圆孔,获得所述肛门括约肌复合体的应力。
71.通过本公开实施例的上述步骤,可以更加直观地从力学角度认识肛门括约肌复合体的力学特性及其损伤导致肛门失禁的发病机制,为盆底功能障碍性疾病尤其是因肛周肌肉组织导致控便功能障碍的发生机制提供了生物力学基础,为如中医挂线疗法等肛萎诊疗方案的制定和定量手术的实施提供了理论支持。
72.在本公开的一个实施例中,由于ct对骨性组织分辨率较高,mr对软组织分辨率较高,因此采用ct扫描骨盆骨性结构,mr扫描肛门括约肌复合体肌群。所述ct和mr扫描范围可以上至骶骨2水平,下至会阴下1.0cm,分别获得受检者骨盆、肛门括约肌复合体肌群软组织ct及mr的dicom格式原始图像数据,并用cd.r光盘刻录存盘。其中,ct可使用美国ge medical systems/discovery ct 750hd,取常规仰卧位轴位进行扫描,扫描参数如图2a所示。mr可使用ge medical systems/discovery mr 750,其中薄层扫描用于三维重建,常规扫描作为解剖识别的参考,取常规仰卧位,使用腹部线圈,令受检者处于静息状态,获取盆底软组织轴位、冠状位及矢状位t2wi图像,mr扫描采用3dmr序列,扫描参数如图2b所示。
73.在本公开的一个实施例中,如图3所示,所述基于骨盆ct数据和肛门括约肌复合体肌群mr数据构建肛门括约肌复合体模型进一步包括步骤s1101-s1103:
74.在步骤s1101中,基于交互式医学影像控制系统对所述ct数据和mr数据进行处理,得到肛门括约肌复合体全局几何模型。具体地,可通过对所述骨盆ct数据和肛门括约肌复合体肌群mr数据进行数据读入、图像定位、图像筛选和区域增长等处理,得到所述肛门括约肌复合体全局几何模型。
75.在本公开的一个实施例中,首先对获得的受检者骨盆、肛门括约肌复合体肌群软组织ct及mr原始图像数据进行标记,得到标记好的肛门括约肌复合体轮廓的影像学断层截图,该截图可以“tif”格式进行保存。然后通过交互式医学影像控制系统对所述标记好的截图进行读取和处理,构建肛门括约肌复合体模型。其中,所述交互式医学影像控制系统可以是mimics软件,所述mimics软件依次读入所述标记好的截图,读入时自动设定超声原始扫描数据,层间距可设为0.8mm,基于mimics软件的threholding功能经过定位图像将勾勒的肛门括约肌复合体组织从复杂的图像中筛选出来,并通过区域增长分割出肛门括约肌复合体肌组织,结合骨盆数据得到肛门括约肌复合体即肛门括约肌复合体的全局几何模型。
76.在步骤s1102中,对所述肛门括约肌复合体全局几何模型进行三维有限元前处理。
77.在步骤s1103中,将所述肛门括约肌复合体全局几何模型转化为实体,根据所述实体得到所述肛门括约肌复合体模型。
78.在本公开的一个实施例中,首先对所述肛门括约肌复合体全局几何模型进行三维有限元前处理,生成有限元网格模型。有限元网格生成是将工作环境下的物体离散成简单单元的过程,在三维空间采用四面体单元划分,二维单元中采用四边形单元划分,对于边界为曲线型和曲面型的单元,有限元分析要求各边或面上有若干点。经过三维有限元前处理
后的肛门括约肌复合体全局几何模型如图4a所示,图4b是图4a的局部放大图。
79.在本公开的一个实施例中,可通过数字模型软件将所述肛门括约肌复合体全局几何模型转化为实体,然后从所述实体中选择从肛缘处外括约肌皮下部到肛门括约肌复合体下缘之间的肌肉组织得到如图5所示的肛门括约肌复合体模型。如图5所示,通过前述步骤得到的肛门括约肌复合体模型包括肛门括约肌复合体1和肛门括约肌复合体圆孔2,所述圆孔2的直径可通过参数化三维软件进行测量。其中,所述数字模型软件可以是geomagic studio,所述参数化三维软件可以是pro/engineer。
80.在本公开的一个实施例中,所述在有限元仿真系统中获取所述肛门括约肌复合体模型可以是,将前述步骤中获得的肛门括约肌复合体模型转化为合适的格式导入有限元仿真系统。其中,所述合适的格式可以是.igs格式,所述有限元仿真系统可以是abaqus模拟有限元软件。
81.在本公开的一个实施例中,所述在有限元仿真系统中创建解析刚体可以是,在有限元仿真系统中创建解析刚体部件,定义该解析刚体的尺寸和材料属性。以在abaqus模拟有限元软件中创建解析刚体为例,首先可通过“create part”模块创建解析刚体部件,并定义该解析刚体的尺寸。在一个示例中,如图6所示所述解析刚体可包括圆柱部分,和与圆柱部分连接的半球部分,所述解析刚体的圆柱部分和半球部分的直径可以为12mm-15mm,优选12mm;然后通过“property”模块中的“create material”子模块为所述解析刚体赋予材料属性,所述材料属性可以是弹性模量为0.95kpa,泊松比为0.45,密度为1.12e-9
kg/mm3,同时在该子模块的材料力学属性中还可以输入通过实验获得的肛门括约肌复合体的应力-应变关系;最后通过“create section”模块创建截面,并通过“assign section”模块将截面属性赋予肛门括约肌复合体部件。
82.在本公开的一个实施例中,如图7所示,所述在所述有限元仿真系统中使所述解析刚体穿过所述肛门括约肌复合体圆孔之前,还包括步骤s210-s240:
83.在步骤s210中,在所述有限元仿真系统中将所述肛门括约肌复合体模型和所述解析刚体转化为实例。
84.在本公开的一个实施例中,可以通过abaqus模拟有限元软件中,“assembly”模块中的“instance part”子模块将所述肛门括约肌复合体模型和所述解析刚体转化为实例。
85.在步骤s220中,在所述有限元仿真系统中使所述肛门括约肌复合体模型和所述解析刚体处于临近位置。
86.在本公开的一个实施例中,可以首先通过abaqus模拟有限元软件中,“step”模块中的“create step”子模块创建一个动力显式分析步,即“dynamic,explicit”分析步,其中参数“time period”可设置为1;然后通过“interaction”模块的“create interaction property”子模块创建接触属性为摩擦接触,以使所述肛门括约肌复合体模型和所述解析刚体处于临近位置;最后通过“create interaction”子模块设置所述解析刚体为接触主面,所述肛门括约肌复合体为接触负面,接触类型为“surface-to-surfacecontact(explicit)”面面接触,此时分析步选择前述步骤中创建的动力显示分析步。设置接触属性后的模型如图8所示。
87.在步骤s230中,在所述有限元仿真系统中定义边界条件。
88.在本公开的一个实施例中,可以通过abaqus模拟有限元软件中,“load”模块中的“create boundary condition”子模块定义边界条件。在一个示例中,首先将abaqus模拟有限元软件中的分析步选择“initial”,得到如图9所述的约束了两侧面的模型;然后选择解析刚体上的参考点“rp”,在分析步“initial”中约束全部六个自由度,从而实现将肛门括约肌复合体两侧面的六个自由度全部约束。此时分析步可选择“initial”。
89.在步骤s240中,对所述肛门括约肌复合体进行网络划分。
90.在本公开的一个实施例中,可以通过abaqus模拟有限元软件中的“mesh”模块对所述肛门括约肌复合体进行网络划分,其中“seed part”子模块中的参数“approximate global size”可设为5,其他属性不变;网格属性定义模块“assign mesh controls”中,网格属性可设为四面体“tet”自由化网格,其他属性不变;单元类型定义模块“assign element type”中可选择显示非线性单元类型,即“element library”设为“explicit”,“geometric order”设为“quadratic”,“family”设为“3d stress”。
91.在本公开的一个实施例中,所述步骤s140进一步包括:旋转所述解析刚体使其轴线方向与所述肛门括约肌复合体圆孔相垂直;使所述解析刚体沿z轴向下移动穿过所述肛门括约肌复合体圆孔,获得所述肛门括约肌复合体的应力。
92.以在abaqus模拟有限元软件中模拟所述肛门括约肌复合体的应力为例,首先在前述步骤s210通过“assembly”模块中的“instance part”子模块将所述肛门括约肌复合体模型和所述解析刚体转化为实例后,旋转所述解析刚体使其轴线方向与所述肛门括约肌复合体圆孔相垂直。然后在前述步骤s230在分析步“initial”中约束全部六个自由度后,将“step-1”模块中的参数“u3”设为预设数值,以使所述解析刚体沿z轴向下移动所述预设数值穿过圆孔。其中,所述预设数值可以是20mm。最后,通过“job”模块中的“create job”子模块启动所述肛门括约肌复合体的应力仿真作业,仿真作业完成后在圆孔部位创建一条节点路径path1,得到如图10中所示的输出路径path1上的由各应力点位连接构成的应力曲线。
93.根据本公开实施例提供的技术方案,通过无创检查结合有限元模型模拟肛门括约肌复合体的应力,能够更加直观地从力学角度认识肛门括约肌复合体的力学特性及其损伤导致肛门失禁的发病机制,为盆底功能障碍性疾病尤其是因肛周肌肉组织导致控便功能障碍的发生机制提供了生物力学基础,为如中医挂线疗法等肛萎诊疗方案的制定和定量手术的实施提供了理论支持。
94.以下参照图11描述根据本公开的实施例的模拟肛门括约肌复合体应力装置的结构框图。
95.图11示出根据本公开的实施例的模拟肛门括约肌复合体应力的装置1100的结构框图。其中,该装置可以通过软件、硬件或者两者的结合实现成为电子设备的部分或者全部。该装置包括:
96.模型构建单元1110,被配置为基于骨盆ct数据和肛门括约肌复合体肌群mr数据构建肛门括约肌复合体模型,其中,所述肛门括约肌复合体模型包括肛门括约肌复合体圆孔;
97.应力模拟单元1120,被配置为在有限元仿真系统中获取所述肛门括约肌复合体模型数据;在所述有限元仿真系统中创建解析刚体,所述解析刚体包括圆柱部分,和与圆柱部分连接的半球部分;并在所述有限元仿真系统中使所述解析刚体穿过所述肛门括约肌复合体圆孔,获得所述肛门括约肌复合体的应力。
98.本领域技术人员可以理解,参照图11描述的技术方案的可以与参照图1至10描述
的实施例结合,从而具备参照图1至图10描述的实施例所实现的技术效果。具体内容可以参照以上根据图1至图10进行的描述,其具体内容在此不再赘述。
99.以上描述仅为本公开的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本公开中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本公开中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1