一种无人驾驶惯性导航实训装置的制作方法
本发明属于车辆教学,具体地说,涉及一种无人驾驶惯性导航实训装置。
背景技术:
1、无人驾驶技术集人工智能、计算机视觉、组合导航、信息融合、自动控制和体系结构等众多高技术于一体,是计算机科学、自动化技术高度发展的产物,也是衡量一个国家科技实力和工业水平的重要标志。由于它在改善车辆驾驶性能、减轻驾驶人员劳动强度、降低交通事故发生率,以及在恶劣条件和极限条件下作业等方面具有普通车辆无可比拟的优点,因此成为许多国家以及著名汽车公司、工程机械制造商竞相研制开发的重点高科技项目;
2、惯性导航系统(ins,以下简称惯导)是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下。惯导的基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息;惯性导航在无人驾驶中应用,可以获得无人驾驶汽车的瞬时速度和位置信息,惯性导航系统安装在运载体内,工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰,是一种自主式导航系统。
3、在车辆实训教学中,对惯性导航在无人驾驶中的应用教学中,学生只能通过视频、图片来看到惯性导航在无人驾驶的汽车中的应用,无法直观的看清惯性导航在无人驾驶中的零部件及零部件的连接关系和工作原理,使得老师教学质量大大降低,学生不能直观的理解惯性导航在汽车中的应用原理,从而导致学生的学习效果差,为此,我们提出一种无人驾驶惯性导航实训装置。
技术实现思路
1、本发明提供了一种无人驾驶惯性导航实训装置,以解决以上存在的技术问题。
2、为实现上述目的,本发明所采用的技术方案如下:
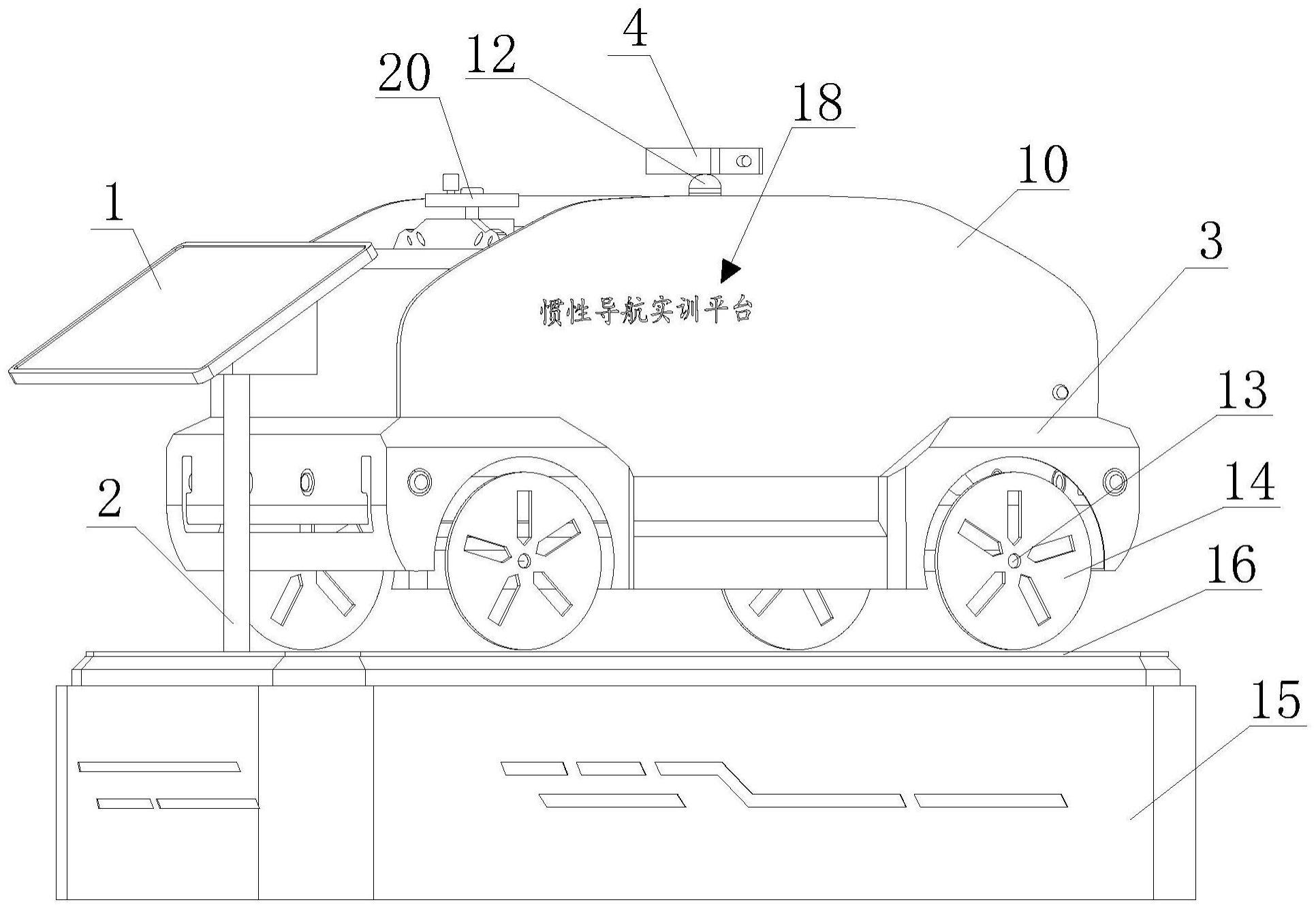
3、一种无人驾驶惯性导航实训装置,关键点在于,该实训装置包括底座,和位于所述底座上的模型组件、一体机电脑,其中:所述一体机电脑位于所述模型组件的前侧,所述一体机电脑经立柱固定于所述底座上;所述模型组件包括壳体、车轮模块、滑轨模块、惯性导航,所述壳体经立柱固定于所述底座上,所述壳体安装有电压转换器、防碰撞控制器、数据采集can盒,所述所述电压转换器通过连接线分别为所述防碰撞控制器、所述数据采集can盒和所述惯性导航相电性连接,所述数据采集can盒分别通过can线与所述防碰撞控制器、所述惯性导航相电性连接;所述壳体左右两侧的上方分别设置有左侧板和右侧板,所述滑轨模块经横杆固定在所述左侧板和所述右侧板上,所述惯性导航经安装座安装在所述滑轨模块,所述滑轨模块的前后两端均安装有天线,所述天线通过连接线与所述惯性导航相电性连接,所述惯性导航和所述天线一同随着滑轨模块可进行前后左右四个方向的移动,所述惯性导航分别通过网线与所述一体机电脑相电性连接;所述车轮模块的数量为四个且分别位于所述壳体的四角处,所述车轮模块包括电机控制器、模拟电机、传动轴,所述电机控制器通过连接线与所述电压转换器相电性连接,所述模拟电机通过连接线与所述电机控制器相电性连接,所述模拟电机的旋转轴通过联轴器与所述传动轴的一端相连接,所述模拟轮安装在所述传动轴的另一端,所述轮速传感器安装在所述传动轴的中部,所述模拟轮和所述轮速传感器随着模拟电机的旋转而旋转,所述轮速传感器通过连接线与所述防碰撞控制器相电性连接。
4、在一种可能的实现方式中,所述一体机电脑的显示屏与水平面的夹角为α,其中15°≤α≤50°。
5、在一种可能的实现方式中,所述一体机电脑和所述电压转换器分别通过电源线与外界电源相电性连接。
6、在一种可能的实现方式中,所述电压转换器、所述防碰撞控制器和所述数据采集can盒均安装在所述壳体的底板上,所述电压转换器位于所述数据采集can盒的左侧,所述采集can盒位于所述防碰撞控制器的前侧。
7、在一种可能的实现方式中,所述左侧板与所述右侧板相互对称,所述左侧板和所述右侧板均由透明的亚克力材质加工而成。
8、在一种可能的实现方式中,所述左侧板上印刻有工作原理图,所述右侧板上印刻有所述实训装置的名称。
9、在一种可能的实现方式中,所述滑轨模块包括下轨道、下滑块、上轨道和上滑块,所述下轨道固定在所述横杆上,所述下滑块安装在所述下轨道里,且可在所述下轨道内左右移动,所述上轨道固定在所述下滑块上,所述上滑块安装在所述上轨道里,且可在所述上轨道内前后移动。
10、在一种可能的实现方式中,所述滑轨模块还包括下手轮和上手轮,所述下手轮安装在所述下滑块上,通过摇动所述下手轮驱动所述下滑块在所述下轨道上左右移动;所述上手轮安装在所述上滑块上,通过摇动所述上手轮驱动所述上滑块在所述上轨道上前后移动。
11、在一种可能的实现方式中,所述滑轨模块还包括滑块电路板、滑块遥控器、第一电机和第二电机,所述滑块电路板安装在所述壳体上,所述滑块电路板通过连接线与所述电压转化器相电性连接,所述滑块电路板的接收器与所述滑块遥控器中的发射器相无线连接,所述滑块电路板通过连接线分别与所述第一电机和所述第二电机相电性连接,所述第一电机安装在所述下滑块上,通过所述第一电机驱动所述下滑块在所述下轨道上左右移动,所述第二电机安装在所述上滑块上,通过所述第二电机驱动所述上滑块在所述上轨道动。
12、在一种可能的实现方式中,所述车轮模块还包括固定板、电机板、轴承座,所述固定板经紧固件固定在所述底座上,所述电机板固定在所述固定板上,所述模拟电机安装在所述电机板的一侧,所述轴承座固定在所述固定板上,所述旋转电机安装在所述轴承座上,所述轴承座的数量为两个且分别位于所述轮速传感器的左右两侧。
13、有益效果:
14、本发明提供了一种无人驾驶惯性导航实训装置,该实训装置包括底座,和位于底座上的模型组件、一体机电脑;模型组件包括壳体、车轮模块、滑轨模块、惯性导航;所述壳体安装有电压转换器、防碰撞控制器、数据采集can盒,电压转换器通过连接线分别为防碰撞控制器、数据采集can盒和惯性导航相电性连接,数据采集can盒分别通过can线与防碰撞控制器、惯性导航相电性连接;惯性导航经安装座安装在滑轨模块,滑轨模块的前后两端均安装有天线,天线通过连接线与惯性导航相电性连接,惯性导航和天线一同随着滑轨模块可进行前后左右四个方向的移动,惯性导航分别通过网线与一体机电脑相电性连接;车轮模块包括电机控制器、模拟电机、传动轴,电机控制器通过连接线与电压转换器相电性连接,模拟电机通过连接线与电机控制器相电性连接,模拟电机的旋转轴通过联轴器与传动轴的一端相连接,模拟轮安装在传动轴的另一端,轮速传感器安装在传动轴的中部,模拟轮和轮速传感器随着模拟电机的旋转而旋转,轮速传感器通过连接线与防碰撞控制器相电性连接;本发明通过滑轨模块控制惯性导航的位置,惯性导航对驾驶汽车的瞬时速度和汽车的位置信息进行采集,并将采集的数据经过数据采集can盒传递到一体机电脑上,并通过一体机电脑进行图像显示,通过轮速传感器来实时监测模拟轮的速度,轮速传感器用于采集模拟轮的转速,并将采集到的轮速数据传递给防碰撞控制器,防碰撞控制器把轮速数据进行处理,通过数据采集can盒转变成can数据,并传递到一体机电脑上,防碰撞控制器的作用为,采集车辆实际车轮与定位偏离距离,并进行对比,从而来实行定位纠偏和速度纠偏,本发明使学生能更加直观清楚的理解无人驾驶中惯性导航与汽车内部的电气元件的连接关系、工作过程及工作原理,使教学更加生动形象,充分调动学生的积极性,可以让学生直观清楚的掌握无人驾驶惯性导航与汽车的连接原理和工作原理及工作过程,提高了老师的教学效果。
15、本发明提供了一种无人驾驶惯性导航实训装置,左侧板和右侧板相互对称,左侧板和右侧板均由透明的亚克力材质加工而成,通过将左侧板和右侧板的材质设计成亚克力材质,可以使学生清楚的看清楚壳体内部的零件的结构。
16、本发明提供了一种无人驾驶惯性导航实训装置,左侧板上印刻有工作原理图,右侧板上印刻有实训装置的名称,可以使学生能过清楚的认识到无人驾驶惯性导航的原理及本发明的名称。
- 还没有人留言评论。精彩留言会获得点赞!