一种基于MR技术的机动车驾驶智能培训系统
一种基于mr技术的机动车驾驶智能培训系统
技术领域
1.本实用新型涉及机动车驾驶智能培训技术领域,具体涉及一种基于mr技术的机动车驾驶智能培训系统。
背景技术:
2.机动车已成为人们出行的必备工具之一。据统计,我国机动车驾驶人数量已达3.96亿人且呈高速增长态势。绝大多数机动车驾驶培训均需在现实环境中进行实车操作,需要较高人力和物力成本投入、易受现实环境因素(如训练场地、天气)影响,且具有一定风险,尤其是对于一些新接触机动车的驾驶员,由于其进行实车操作时具有恐惧心理且操作动作不熟练,给实车驾驶培训带来更大安全隐患。如何实现更加有效、安全且符合成本效益的机动车驾驶培训已成为该领域丞待解决的问题。
3.随着虚拟现实技术的发展,目前市场上已提出一些运用头戴式全沉浸虚拟现实技术配合机动车仿真驾驶舱进行驾驶培训。然而实用新型人发现采用该技术的一个显著缺点就是在模拟机动车驾驶时,驾驶员的视线完全被头戴式虚拟现实设备所遮蔽,导致其无法准确地与机动车仿真驾驶舱进行交互,例如变换档位、踩下加速踏板装置或行车制动装置,这势必会降低机动车驾驶培训的效果。
4.而mr(混合现实)技术经过了20多年的发展,相关技术取得了显著的进步,展示出强劲的发展前景。人机交互是mr的重要支撑技术,也是近年来国内外的研究热点。大量极具创新性的mr应用,实物交互、3d交互、多通道和混合交互在这些应用中表现出了强大的生命力,极大地促进了交互技术的发展。
技术实现要素:
5.为了克服现有技术存在的缺陷与不足,本实用新型提出一种基于mr技术的机动车驾驶智能培训系统,利用mr技术为驾驶员在培训过程中提供多感官虚拟视听环境,同时使其能够准确与机动车仿真驾驶舱进行有效交互。
6.为了达到上述目的,本实用新型采用以下技术方案:
7.一种基于mr技术的机动车驾驶智能培训系统,设有动车仿真驾驶舱、运动平台、第一数据处理器,所述机动车仿真驾驶舱固定设置在运动平台上,所述机动车仿真驾驶舱用于为驾驶员提供驾驶操作环境,所述运动平台用于模拟行车过程中的车辆振动情况,所述第一数据处理器用于接收由机动车仿真驾驶舱采集的驾驶员操作指令及驾驶数据、模拟机动车驾驶过程中的运动及视听场景;
8.所述基于mr技术的机动车驾驶智能培训系统还包括cave沉浸式mr视听系统,所述cave沉浸式mr视听系统分别与第一数据处理器、机动车仿真驾驶舱连接;
9.所述cave沉浸式mr视听系统包括cave主体支架、投影屏幕、第二数据处理器和3d眼镜以及环绕立体音响系统,第一数据处理器分别与投影屏幕、第二数据处理器连接,cave主体支架与环绕立体音响系统连接,第二数据处理器分别与投影屏幕、环绕立体音响系统
连接;
10.所述投影屏幕和环绕立体音响系统分别固定设置在cave主体支架上,从而形成一个环绕的洞穴式立体视听空间,所述投影屏幕用于显示虚拟驾驶场景的交互界面,所述3d眼镜用于将双通道不同频率输出的2d视频画面转化为3d影像。
11.作为优选的技术方案,所述cave沉浸式mr视听系统还包括多组运动追踪摄像头和运动追踪模块,所述多组运动追踪摄像头与第一数据处理器、cave主体支架连接,所述运动追踪模块分别与机动车仿真驾驶舱、3d眼镜连接;
12.多组运动追踪摄像头分别固定设置在cave主体支架上,所述多组运动追踪摄像头用于捕捉驾驶员在模拟驾驶过程中的运动情况,所述运动追踪模块用于捕获驾驶员视线位置信息、机动车仿真驾驶舱位置信息,所述3d眼镜用于将双通道不同频率输出的2d视频画面转化为3d影像。
13.作为优选的技术方案,所述机动车仿真驾驶舱设有可调节座椅、方向盘装置、行车灯光控制装置、机动车启动开关、加速踏板装置、行车制动装置、驻车制动装置、离合装置、档位变换装置、采集检测装置、驾驶指导处理器以及显示器;
14.所述驾驶指导处理器分别与可调节座椅、方向盘装置、行车灯光控制装置、机动车启动开关、加速踏板装置、行车制动装置、驻车制动装置、离合装置、档位变换装置、采集检测装置、显示器连接;
15.所述驾驶指导处理器内嵌在显示器内,所述驾驶指导处理器用于为驾驶员提供实时行车的指导信息,显示器用于显示实时行车的指导信息;
16.所述采集检测装置包括转向角度传感器、压力传感器、位移传感器,所述转向角度传感器用于检测方向盘的旋转角度,所述压力传感器用于检测刹车踏板和油门在踩踏过程中承受的压力,所述位移传感器用于检测刹车踏板和油门在踩踏过程中发生的位移。
17.作为优选的技术方案,所述投影屏幕设有至少3个oled高清显示屏,oled高清显示屏依次连接形成环状结构。
18.作为优选的技术方案,所述投影屏幕采用柔性曲面屏,所述柔性曲面屏首尾相连形成环状结构并设置在机动车仿真驾驶舱的外周围。
19.作为优选的技术方案,所述投影屏幕设有3个oled高清显示屏,3个oled高清显示屏依次连接形成u型结构,3个oled高清显示屏分别设置在机动车仿真驾驶舱的前方、左侧、右侧。
20.作为优选的技术方案,所述投影屏幕采用柔性曲面屏,所述柔性曲面屏弯曲形成u型,所述柔性曲面屏围绕在机动车仿真驾驶舱的前方、左侧、右侧。
21.作为优选的技术方案,所述运动追踪模块包括第一运动追踪部件和第二运动追踪部件,第一运动追踪部件固定设置在3d眼镜上,第二运动追踪部件设置在机动车仿真驾驶舱的前端部位上。
22.作为优选的技术方案,所述运动平台设有六自由度平台、伺服驱动器以及微型控制器,所述伺服驱动器分别与六自由度平台、微型控制器连接,所述伺服驱动器用于驱动六自由度平台,所述微型控制器用于提供伺服驱动器的驱动参数;
23.所述六自由度平台包括上平台、固定设置在地面上的下平台以及6个液压电动缸,6个液压电动缸分别与上平台、下平台连接,所述六自由度平台采用stewart结构,所述机动
车仿真驾驶舱具体固定设置在上平台的上方;
24.所述6个液压电动缸通过伺服驱动器进行驱动实现六自由度平台的运动;
25.所述运动平台还设有六维力传感器,所述六维力传感器分别设置在上平台与液压电动缸的连接节点处,所述六维力传感器设置在六自由度平台上。
26.作为优选的技术方案,所述运动平台还设有手持终端,所述手持终端与微型控制器无线连接。
27.本实用新型与现有技术相比,具有如下优点和有益效果:
28.(1)本实用新型在进行机动车驾驶培训时,驾驶员处于室内固定环境,不受驾驶培训场地、天气、车辆、行人等因素影响,这将有效降低驾驶员初学驾驶时的心理恐惧感,培训过程具有更高的安全性,避免因各种现实环境因素对实车操作造成的影响,即便在虚拟环境中出现车辆剐蹭、碰撞等情况,也不会造成实际人员伤亡,进而提高了机动车驾驶培训的安全系数;同时,本实用新型在驾驶培训时仅采用电能等可再生能源,无燃油消耗和真车磨损,驾驶培训方式更加绿色环保,因此本实用新型在机动车驾驶培训过程更加安全、环保。
29.(2)相比于传统头戴式虚拟现实技术,本实用新型透过3d眼镜将投屏在oled高清显示屏上的视频内容转化为3d画面,同时利用3d眼镜的透光性质,为驾驶员可准确定位机动车仿真模拟系统中的各组件,例如方向盘装置、加速踏板装置、行车制动装置、驻车制动装置、离合装置等,从而利用mr技术有效解决驾驶员在虚拟环境中与机动车仿真模拟系统无法准确互动的问题。
附图说明
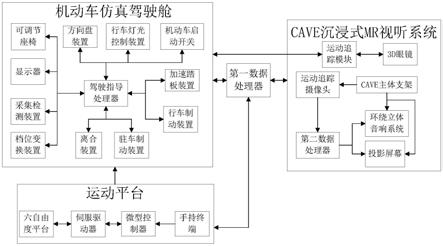
30.图1为本实用新型实施例1中基于mr技术的机动车驾驶智能培训系统的结构示意图;
31.图2为本实用新型实施例1中投影屏幕采用四边形的环状结构的示意图;
32.图3为本实用新型实施例2中投影屏幕采用三角形的环状结构的示意图;
33.图4为本实用新型实施例2中投影屏幕采用圆形的环状结构的示意图;
34.图5为本实用新型实施例2中投影屏幕采用u型结构的示意图。
35.其中,1
‑
机动车仿真驾驶舱,2
‑
运动平台,3
‑
投影屏幕。
具体实施方式
36.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
37.实施例
38.实施例1
39.如图1所示,本实施例提供了一种基于mr技术的机动车驾驶智能培训系统,该系统包括机动车仿真驾驶舱1、运动平台2、第一数据处理器以及cave沉浸式mr视听系统,其中cave为cave automatic virtual environment,即洞穴式自动虚拟环境。第一数据处理器分别与运动平台2、机动车仿真驾驶舱1、cave沉浸式mr视听系统连接,机动车仿真驾驶舱1还与运动平台2、cave沉浸式mr视听系统连接。
40.机动车仿真驾驶舱1用于为驾驶员提供驾驶操作环境,运动平台2用于模拟行车过程中的车辆振动情况,例如转弯、刹车等,将模拟的行车路况及车辆驾驶进行实时反馈以提高驾驶员的驾驶体验。
41.在本实施例中,机动车仿真驾驶舱1固定设置在运动平台2上,该机动车仿真驾驶舱1设有可调节座椅、方向盘装置、行车灯光控制装置、机动车启动开关、加速踏板装置、行车制动装置、驻车制动装置、离合装置、档位变换装置、采集检测装置、驾驶指导处理器以及显示器。
42.驾驶指导处理器分别与可调节座椅、方向盘装置、行车灯光控制装置、机动车启动开关、加速踏板装置、行车制动装置、驻车制动装置、离合装置、档位变换装置、采集检测装置、显示器连接。采集检测装置分别与方向盘装置、加速踏板装置、行车制动装置、驻车制动装置、离合装置、档位变换装置连接。各组件配合使用以模拟驾驶员实车操作过程,驾驶人员对各组件操作生成驾驶员操作指令,机动车仿真驾驶舱1采集驾驶员操作指令并传送至第一数据处理器进行处理。相应路况信息及车辆位姿状态经第一数据处理器解算后反馈至运动平台2和cave沉浸式mr视听系统,从而带动机动车仿真驾驶舱1模拟出车辆振动、加速、减速、转弯、撞击等效果以增加驾驶员在mr环境中的感官效果。同时驾驶指导处理器内嵌在显示器内作为平板电脑,驾驶指导处理器为驾驶员提供实时行车的指导信息,例如车速、与前车安全距离、转弯时是否打转向灯、换挡时机、油门及制动情况,显示器用于显示实时行车的指导信息。
43.实际应用时,当驾驶员完成一次车辆驾驶培训后,可通过位于方向盘装置一侧的平板电脑了解其相关的车辆驾驶情况,以帮助驾驶员提高机动车驾驶技巧。
44.在完成机动车的运动及视听仿真输出后,通过采集检测装置进行采集驾驶员的具体动作信息,从而为驾驶绩效分析提供数据支持。实际应用时,采集检测装置包括转向角度传感器、压力传感器、位移传感器中的一种或多种,转向角度传感器用于检测方向盘的旋转角度,压力传感器用于检测刹车踏板和油门在踩踏过程中承受的压力,位移传感器用于检测刹车踏板和油门在踩踏过程中发生的位移。实际应用时,转向角度传感器采用一种用于确定方向盘轴的角位置的设备,如转向柱,其包括线圈组、线圈支座和耦合器元件,该耦合器元件具有与方向盘轴的角位置有关的耦合器角位置。线圈组包括发送器线圈和至少一个接收器线圈,该耦合器元件用于改变发送器线圈、信号处理电路和至少一个接收器线圈之间的电感耦合。信号处理电路从线圈组接收线圈信号和参考信号,并且使用接收器信号和参考信号确定角位置,该参考信号与轴向位移有关,然而在别的方面基本上独立于角位置。方向盘左转或右转都会被转向角传感器检测到,从而发出正确的转向指令。而方向盘的转动角度是为汽车实现转向幅度提供依据,使汽车按照驾驶员的转向意图行驶。转向角传感器由光电耦合元件、开孔槽板等组成。光电耦合元件为发光二极管和光敏晶体管。开孔槽板置于发光二极管和光敏晶体管之间。开孔槽板有许多小孔。当方向盘转动时,开孔槽板会跟随转动。光敏晶体管依据穿过开孔槽板的光线来动作,并且会输出数字脉冲信号。并以此信号来辨认方向盘的转向角度、转动方向和转速。压力传感器采用油压传感器,其内设有半导体应变片,应变片形变时电阻也发生变化;另外还设有金属薄片,通过金属膜片应变片检测出压力的变化,并将其转换成电信号后对外输出。位移传感器采用磁致伸缩位移传感器,通过内部非接触式的测控技术精确地检测活动磁环的绝对位置来测量刹车踏板和油门在踩
踏过程中发生的实际位移值。
45.第一数据处理器用于接收由机动车仿真驾驶舱1中各组件采集的驾驶员操作指令及驾驶数据、模拟机动车驾驶过程中的运动及视听场景。具体地,第一数据处理器将驾驶运动过程数据实时反馈至运动平台2和cave沉浸式mr视听系统,进而将机动车驾驶过程中的运动及视听场景进行仿真输出。实际应用时,驾驶员操作指令包括方向盘转角控制、油门控制、刹车控制、离合控制、档位控制等,驾驶数据包括方向盘转角、各类踏板的开合幅度以及档位数值。
46.在本实施例中,运动平台2设有六自由度平台、伺服驱动器以及微型控制器,伺服驱动器分别与六自由度平台、微型控制器连接。伺服驱动器用于驱动六自由度平台,微型控制器用于提供伺服驱动器的驱动参数。
47.在本实施例中,六自由度平台包括上平台、固定设置在地面上的下平台以及6个液压电动缸,6个液压电动缸分别与上平台、下平台连接,六自由度平台采用stewart结构进而利用液压电动缸支撑上平台。具体地,各液压电动缸采用虎克铰与上平台、下平台连接。实际应用时,6个液压电动缸通过伺服驱动器进行驱动实现六自由度平台的运动,具体地,第一数据处理器接收由机动车仿真驾驶舱1采集的驾驶员操作指令及驾驶数据,通过对运动平台2位姿、液压电动缸缸长进行解算得到液压电动缸缸长调节值,进而将液压电动缸缸长调节值发送给微型控制器进行调节液压电动缸缸长,从而实现上平台在六个自由度的运动;其中上平台在六个自由度的运动具体为笛卡尔坐标系内的三个平移运动和环绕三个坐标轴的转动。
48.在本实施例中,运动平台2还设有六维力传感器和手持终端,六维力传感器分别设置在上平台与液压电动缸的连接节点处,六维力传感器设置在六自由度平台上。当六自由度平台开始工作时,六维力传感器实时感知这六个连接节点处的压力大小值,反馈至第一数据处理器。手持终端与微型控制器无线连接,手持终端用于紧急制动伺服驱动器,使六自由度平台停止运行,进而对机动车仿真驾驶舱1实现制动效果,避免设备失控情况下无法制动导致驾驶员出现意外。
49.在本实施例中,机动车仿真驾驶舱1具体固定设置在上平台的上方。
50.在本实施例中,cave沉浸式mr视听系统包括cave主体支架、投影屏幕3、第二数据处理器、多组运动追踪摄像头、运动追踪模块和3d眼镜以及环绕立体音响系统。第一数据处理器分别与多组运动追踪摄像头、投影屏幕3、第二数据处理器连接,cave主体支架分别与多组运动追踪摄像头、环绕立体音响系统连接,第二数据处理器分别与投影屏幕3、环绕立体音响系统连接,运动追踪模块分别与机动车仿真驾驶舱1、3d眼镜连接。
51.如图2所示,投影屏幕3采用多个oled高清显示屏,具体地,4个oled高清显示屏依次连接形成四边形的环状结构,投影屏幕3和环绕立体音响系统分别固定设置在cave主体支架上,从而形成一个环绕的洞穴式立体视听空间。多组运动追踪摄像头用于捕捉驾驶员在模拟驾驶过程中的运动情况,运动追踪模块用于捕获驾驶员视线位置信息、机动车仿真驾驶舱1位置信息;多组运动追踪摄像头分别固定设置在视听空间的不同维度,多组运动追踪摄像头悬挂在cave主体支架的四周角落区域,或者多组运动追踪摄像头悬挂在cave主体支架的四周侧面,通过拍照以获取更精准的驾驶动作信息;运动追踪模块设有多个,包括第一运动追踪部件和第二运动追踪部件,第一运动追踪部件固定设置在3d眼镜上,第二运动
追踪部件设置在机动车仿真驾驶舱1的前端部位上;实际应用时,运动追踪模块采用定位仪,具体为蓝牙定位器。多组运动追踪摄像头采集驾驶员驾驶图像。
52.当驾驶员进行虚拟驾驶活动时,利用3d眼镜结合投影屏幕3进行显示,将双通道不同频率输出的2d视频画面转化为3d影像,结合运动追踪摄像头和运动追踪模块得到运动追踪情况,第二数据处理器将驾驶员操作指令及驾驶数据传输至第一数据处理器进而调节运动平台2,第二数据处理器还将视频画面反馈于4个高清oled显示屏上,进而投影屏幕3上的输出画面会随驾驶员头部及车辆的运动情况进行实时调整,以减少驾驶员在虚拟现实环境下产生的眩晕感等不良效果。具体地,第二数据处理器对运动追踪情况进行解析并将运动追踪视频、运动追踪音频信号实时输出至oled高清显示屏及环绕立体音响系统,通过3d眼镜将投屏在oled高清显示屏上的视频内容转化为3d画面以增强驾驶员在mr环境中的视听效果,从而为驾驶员提供机动车仿真驾驶环境,进而对机动车进行操控,例如加速、刹车、换挡、转弯等。
53.在本实施例中,投影屏幕3用于显示虚拟驾驶场景的交互界面。
54.在本实施例中,基于mr技术的机动车驾驶智能培训系统还设有数据存储器,第二数据处理器与数据存储器连接。实际应用时,第二数据处理器具体采用配置有高性能显卡的计算机组,数据存储器具体采用数据库服务器,进而数据存储器将第二数据处理器处理的数据进行存储记录。
55.在本实施例中,第一数据处理器具体采用中控计算机。此外,本领域技术人员还可根据实际情况采用基于云平台的服务器实现相应的处理分析功能,本实施例在此不对第一数据处理器作限定。
56.实施例2
57.本实施例2在实施例1的基础上对投影屏幕3的结构进行拓展,本实施例提供了拓展的环状结构和u型结构。
58.具体地,在环状结构中,如图3所示,投影屏幕3采用3个oled高清显示屏依次连接形成三角形的环状结构,oled高清显示屏在连接处形成角落区域,多组运动追踪摄像头分别悬挂在角落区域。多组运动追踪摄像头还可分别设置在各oled高清显示屏所在平面的一侧,本实施例在此对多组运动追踪摄像头的具体悬挂位置不做限定。
59.此外,本领域技术人员还可采用5个、6个或更多数量的oled高清显示屏进行依次连接形成环状结构。
60.如图4所示,投影屏幕3还可采用柔性曲面屏,该柔性曲面屏首尾相连形成圆形的环状结构,并设置在机动车仿真驾驶舱1的外周围。
61.如图5所示,在u型结构中,投影屏幕3采用3个oled高清显示屏,3个oled高清显示屏依次连接形成u型结构,3个oled高清显示屏分别设置在机动车仿真驾驶舱1的前方、左侧、右侧。此外,投影屏幕3还可采用柔性曲面屏,柔性曲面屏弯曲形成u型,该柔性曲面屏围绕在机动车仿真驾驶舱1的前方、左侧、右侧,以使驾驶员获得前、左、右方向的视野。
62.上述实施例为本实用新型较佳的实施方式,但本实用新型的实施方式并不受上述实施例的限制,其他的任何未背离本实用新型的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1