一种面向人机共驾测评的驾驶模拟器高拟真触觉反馈系统
1.本发明属于驾驶模拟器领域,具体涉及一种面向人机共驾测评的驾驶模拟器高拟真触觉反馈系统。
背景技术:
2.随着人机共驾技术的不断发展,驾驶模拟器在科研和工业领域的应用越来越广泛。高拟真的驾驶模拟器可以测试人机共驾系统的功能特性,验证人机共驾系统的接管特性,对构建人机共驾测评体系有着重要的影响。
3.驾驶模拟器主要分为静态模拟器和动态模拟器。在静态模拟器中,视觉和听觉系统负责参与运动感知。而在动态模拟器中,身体其他感官系统也要参与构建驾驶体验。而方向盘、油门、刹车作为现实中驾驶员和车辆系统交互的桥梁,成为构建车辆动态反馈的重要部分。设计一种集成力反馈方向盘、油门和刹车的驾驶模拟器触觉反馈系统为人机共驾测试与评价等研究做出积极影响。
4.现目前定制化的高端驾驶模拟器系统价格昂贵,其面向特定场景进行开发,难以实现其他功能,并且高端模拟器一般受到国外技术限制,系统高度集成化,开发难度大。传统普通驾驶模拟器系统一般将方向盘、油门、刹车等部件独立控制,没有实现完整的一套系统进行协同控制,并且仅依靠直流电机完成力感反馈的控制,会造成方向盘力反馈触感失真,降低驾驶模拟器的沉浸感。
技术实现要素:
5.为解决上述问题,提高驾驶模拟器触觉反馈系统的沉浸感,更好测试与评价人机共驾系统,本发明提供了一种面向人机共驾测试与评价的驾驶模拟器高拟真触觉反馈系统。
6.本发明采用的技术方案如下:
7.一种面向人机共驾测评的驾驶模拟器高拟真触觉反馈系统,包括电子刹车踏板(1)、电子油门踏板(2)、力反馈方向盘(3)和微控制器(4)。
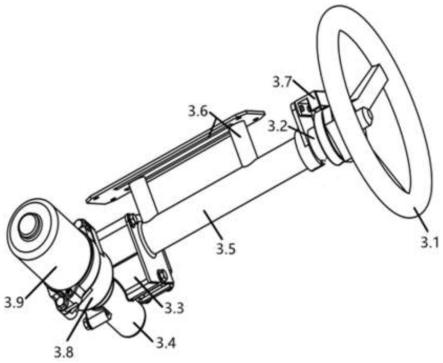
8.所述力反馈方向盘(3)包括方向盘(3.1)、转向轴(3.2)、涡轮(3.3)、蜗杆(3.4)、转向管柱(3.5)、固定支撑结构(3.6)。
9.所述转向管柱(3.5)通过固定支撑结构(3.6)与模拟器驾驶舱连接;所述转向轴(3.2)设置于转向管柱(3.5)内,并通过轴承与转向管柱(3.5)实现相对旋转;所述转向轴(3.2)的上端通过花键与方向盘(3.1)啮合,驾驶员转动方向盘时,方向盘带动转向轴转动;所述转向轴(3.2)的下端与涡轮(3.3)通过花键啮合。
10.所述涡轮(3.3)与蜗杆(3.4)啮合,啮合接触时为线接触,蜗杆(3.4)带动涡轮(3.3)旋转,可以得到大传动比,并且传动平稳、噪音小。
11.其特征在于,所述力反馈方向盘(3),还包括直流助力电机(3.9)、电磁离合器(3.8)、磁环编码器(3.7)。
12.所述直流助力电机(3.9)、电磁离合器(3.8)、蜗杆(3.4)共轴连接;直流助力电机(3.9)带动电磁离合器(3.8)转动,将反力矩传输至方向盘(3.1)。
13.所述电磁离合器(3.8)用于将直流助力电机(3.9)提供的初始驱动力传输到蜗杆(3.4),蜗杆(3.4)带动涡轮(3.3)旋转。
14.所述磁环编码器(3.7),用于读取方向盘(3.1)的转角和转速,并发送给微控制器(4)。
15.所述微控制器(4)实时采集方向盘(3.1)的转角和转速、电子刹车踏板(1)和电子油门踏板(2)的信号,并根据采集的信息发送控制信号给直流助力电机(3.9)和电磁离合器(3.8);所述直流助力电机(3.9)根据控制信号调整自身的转速和转向,所述电磁离合器根据控制信号调节开启和关断的频率,给驾驶员提供模拟的反力矩,实现方向盘的力反馈或自动回正,使驾驶员获得真实的路感。
16.进一步地,所述电磁离合器(3.8)为干式电磁离合器,包括同轴设置的从动端转轴(3.8.2)、主动端转轴(3.8.3)、主动端支撑件(3.8.4)、从动端支撑件(3.8.5)、磁轭(3.8.6)、线圈(3.8.7)、主动端摩擦片(3.8.8)、从动端摩擦片(3.8.9)、复位弹簧(3.8.10)、衔铁(3.8.1)。
17.所述主动端转轴(3.8.3)与直流助力电机(3.9)同轴固定连接,主动端转轴(3.8.3)在直流助力电机(3.9)驱动下旋转。
18.所述主动端支撑件(3.8.4)套接在主动端转轴(3.8.3)上。所述磁轭(3.8.6)安装在主动端支撑件(3.8.4)的磁轭安装槽内,线圈(3.8.7)内嵌于磁轭(3.8.6)内部;所述磁轭(3.8.6)用于收束线圈、约束感应漏磁向外扩散。
19.所述从动端支撑件(3.8.5)套接在从动端转轴(3.8.2)上;从动端支撑件(3.8.5)在复位弹簧(3.8.10)处设置两个衔铁插槽,插槽外套复位弹簧(3.8.10),衔铁(3.8.1)插入从动端支撑件(3.8.5)衔铁插槽内,并通过复位弹簧(3.8.10)与从动端支撑件(3.8.5)连接。
20.所述衔铁(3.8.1)与线圈(3.8.7)之间的空隙设置有主动端摩擦片(3.8.8)和从动端摩擦片(3.8.9),其中主动端摩擦片(3.8.8)与主动端支撑件(3.8.4)固定连接,从动端摩擦片(3.8.9)与衔铁(3.8.1)连接;当线圈(3.8.7)通电时,衔铁(3.8.1)向线圈(3.8.7)方向贴合,主动端摩擦片(3.8.8)和从动端摩擦片(3.8.9)通过摩擦片间摩擦力传递力矩。
21.进一步地,所述磁环编码器(3.7),采用非接触式读取方式,包括磁环编码器磁头(3.7.1)、磁环编码器读头(3.7.2)、磁环编码器固定支架(3.7.3);所述磁环编码器读头(3.7.2)通过磁环编码器固定支架(3.7.3)固定在转向管柱(3.5)上端;所述磁环编码器磁头(3.7.1)固定在转向轴(3.4)上部,随转向轴(3.4)与方向盘(3.1)进行同轴旋转。
22.在现有技术中,单独驱动直流助力电机的控制方式对电机的损耗较大,直流助力电机承受驾驶员操作方向盘的反力矩,当方向盘停止转动,此时直流助力电机还要提供驾驶员真实的方向盘转矩时,相当于直流助力电机堵转,使得直流助力电机线圈通过的电流过大,长时间会烧毁电机的线圈,导致方向盘力反馈系统不能正常工作。本发明采用干式电磁离合器装置,直流助力电机可以保持一定的转速运转,通过调节电磁离合器的开启和关断的频率控制直流助力电机输出给方向盘力矩的大小,从而使得驾驶模拟器力反馈更加真实,也不会使得电机直接堵转,烧毁电机。
23.本发明提供的驾驶模拟器触觉反馈系统,主要根据驾驶员的操作给予驾驶员反向力矩,增强方向盘的跟随性能,模拟方向盘转角回正特性;当施加在方向盘的力矩减少时,直流助力电机会带动转向轴使方向盘自动回正。例如在车辆高速行驶时,方向盘小的转角都会使得车辆失控,因此驾驶员需要较大的力才能转动方向盘,避免由于误打方向盘使得车辆失控。
24.本发明相比于定制化高端模拟器具有价格和技术上的优势,适用场景更加丰富,开发较为方便,沉浸感体验相似。相比传统普通的驾驶模拟器,本发明将方向盘、油门、刹车系统融合控制,根据驾驶员踩刹车和油门的力度控制方向盘转向力矩的大小,实现完整的一套触觉感知系统进行协同控制。在模拟力反馈方面,本设计在直流助力电机和方向盘转轴之间加入电磁离合器,用直流助力电机控制转速和方向,电磁离合器来提供力反馈的阻尼,方向盘力反馈部分更加真实的模拟开车的路感,提供驾驶员合适的随动性。
附图说明
25.图1为本实施例驾驶模拟器整体结构示意图。
26.图2为本实施例电子刹车踏板和电子油门踏板示意图。
27.图3为本实施力反馈方向盘结构示意图。
28.图4为本实施干式电磁离合器示意图。
29.图5为本实施磁环编码器示意图。
具体实施方式
30.本发明面向人机共驾测评的驾驶模拟器高拟真触觉反馈系统,包括电子刹车踏板1,电子油门踏板2,力反馈方向盘3和微控制器4;其中力反馈方向盘3包括方向盘3.1、转向轴3.2、涡轮3.3、蜗杆3.4、转向管柱3.5、固定支架3.6、磁环编码器磁头3.7.1、磁环编码器读头3.7.2、磁环编码器固定支架3.7.3、干式电磁离合器3.8、直流助力电机3.9。
31.所述电子刹车踏板1和电子油门踏板2通过连接轴固定在模拟器驾驶舱如图1所示的位置。所述力反馈方向盘3通过固定连接件3.6安装在模拟器驾驶舱,固定支架3.6上有四个螺孔,采用螺丝进行固定,方便安装及调整力反馈方向盘3的位置。
32.所述转向柱3.2的下端与涡轮3.3通过花键啮合,电磁离合器3.8与蜗杆3.4共轴连接。电磁离合器3.8、涡轮3.3和蜗杆3.4安装在箱体内部,当方向盘带动转向轴转动时,力会通过转向轴3.2传入电磁离合器3.8和直流助力电机3.9,由于转向轴3.2输出端没有连接前轮及转向机构,不会提供给方向盘反力矩,驾驶员不会感受到真实的路感,存在失真感觉。此时需要电磁离合器3.8和直流助力电机3.9的配合,控制直流助力电机的转速和方向以及电磁离合器开启和关闭的频率,给驾驶员提供模拟的反力矩,使驾驶员获得真实的路感。
33.所述干式电磁离合器结构包括:同轴设置的从动端转轴3.8.2、主动端转轴3.8.3、主动端支撑件3.8.4、从动端支撑件3.8.5、磁轭3.8.6、线圈3.8.7、主动端摩擦片3.8.8、从动端摩擦片3.8.9、复位弹簧3.8.10、衔铁3.8.1。
34.所述主动端转轴3.8.3与直流助力电机3.9同轴固定连接,主动端转轴3.8.3在直流助力电机3.9驱动下旋转。
35.所述主动端支撑件3.8.4套接在主动端转轴3.8.3上;所述磁轭3.8.6安装在主动
端支撑件3.8.4的磁轭安装槽内,线圈3.8.7内嵌于磁轭3.8.6内部;所述磁轭3.8.6用于收束线圈、约束感应漏磁向外扩散。
36.所述从动端支撑件3.8.5套接在从动端转轴3.8.2上;从动端支撑件3.8.5在复位弹簧3.8.10处设置两个衔铁插槽,插槽外套复位弹簧3.8.10,衔铁3.8.1插入从动端支撑件3.8.5衔铁插槽内,并通过复位弹簧3.8.10与从动端支撑件3.8.5连接。
37.所述衔铁3.8.1与线圈3.8.7之间的空隙设置有主动端摩擦片3.8.8和从动端摩擦片3.8.9,其中主动端摩擦片3.8.8与主动端支撑件3.8.4固定连接,从动端摩擦片3.8.9与衔铁3.8.1连接;当线圈3.8.7通电时,衔铁3.8.1向线圈3.8.7方向贴合,主动端摩擦片3.8.8和从动端摩擦片3.8.9通过摩擦片间摩擦力传递力矩。
38.所述磁环编码器3.7安装在转向管柱3.5的上端,通过磁环编码器固定支架3.7.3固定在转向管柱3.5外壁上端。磁环编码器磁头3.7.1固定在转向轴3.2上,随转向轴进行同轴旋转。磁环编码器读头3.7.2通过螺丝固定在支架3.7.3上,编码器读数头采用非接触式读取方式。磁环编码器选用了4096线编码器,用于提高检测精度。输出信号分为a、b相通道,有90度的相位差,同时采集这两组信号计算转动速度和方向。当a相信号超前b相时定义为正转,b相信号超前a相时定义为反转,因此可以判断出方向盘转动的方向。在测量转动角度时可以根据a、b相脉冲信号的数量来判断,这样就可以分析驾驶员转动方向盘的转角,以及驾驶员在转动方向盘时的速度。
39.所述方向盘3.1带动转向轴3.2转动,从而带动涡轮3.3、蜗杆3.4转动,蜗杆3.4连接到电磁离合器3.8从动端。所述电磁离合器线圈3.8.7通电时由磁轭3.8.6产生磁力吸合衔铁3.8.1,复位弹簧3.8.10发生形变,衔铁3.8.1向磁轭3.8.6移动并靠紧,衔铁3.8.1的摩擦片与磁轭3.8.6的摩擦片接触,通过两个摩擦片之间的摩擦力传递力矩,带动从动端转轴3.8.2运转,此时电磁离合器处于接合状态,复位弹簧3.8.10提供弹力。线圈3.8.7断电时由复位弹簧3.8.10提供的弹力将衔铁3.8.1弹回,复位弹簧3.8.10恢复到原来状态,衔铁3.8.1与磁轭3.8.6断开,离合器处于分离状态。主动端摩擦片3.8.8和从动端摩擦片3.8.9依靠接触面间的摩擦作用,用电磁力来传递转矩,使主动端和从动端之间可以暂时分离,又可逐渐接合。电磁离合器通电响应迅速,采用干式类接合,可以达到便捷的动作,扭力传输建立时间短。通过控制电磁离合器开启和关断的频率,可以控制直流助力电机传递给方向盘转轴的力矩。
40.所述触觉反馈系统为一个闭环控制系统,能够根据车速、前轮转角等信息控制方向盘输出转矩大小。通过对直流助力电机的控制,实现方向盘的力反馈和自动回正。方向盘直流助力电机的输入为直流,输出转矩通过微控制器输出的pwm进行控制,方向盘正反转通过安装在转向管柱上a、b相磁环编码器读头识别。
41.本发明提供的驾驶模拟器触觉反馈系统包括手部方向盘的触觉感受和脚底刹车和油门反馈的触觉感受,方向盘触觉反馈部分主要根据驾驶员的操作给予驾驶员反向力矩,增强转向盘的跟随性能,当施加在方向盘的力矩减少时,直流助力电机会带动转向轴使方向盘自动回正。当在高速直线驾驶时,方向盘小的转角都会使得车辆失控,在这种情况下微控制器会控制电机和电磁离合器提供较大力矩,使得转向变得困难,也就是说驾驶员需要较大的力才能转动方向盘,避免由于误打方向盘使得车辆失控。当场景需要转弯时,驾驶员转动方向盘,力反馈系统会提供辅助转向,提高驾驶模拟器的沉浸感。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1