一种定量研究刚体转动陀螺仪的实验装置及使用方法与流程
本发明属于教学实验装置,具体涉及一种定量研究刚体转动陀螺仪的实验装置及使用方法。
背景技术:
1、陀螺仪广泛应用在导航、传感和监测等技术领域,具体地,如应用在手机、汽车、航天航空器等上,其与现代科技、生活息息相关,因此在教学中对其引入是十分必要的。随着电子、信息时代来临,陀螺仪已经发展为微尺寸的mems(微机电)陀螺仪,根据其原理还发展出多种多样的陀螺仪,比如:刚体转动陀螺仪、音叉振动陀螺仪、半球谐振陀螺仪、光纤陀螺仪等。其中,刚体转动陀螺仪作为最初的机械陀螺仪,是刚体转动最为典型的模型。
2、目前教学过程中使用的刚体转动陀螺教学设备,通常仅为演示型设备,只能对陀螺的定轴、进动和章动现象做定性演示,无法对刚体转动陀螺模型中的各物理量变化做定量研究和相互关联性的研究,即现有的刚体转动陀螺教学设备不能全面的展示刚体转动陀螺的特性,因此,有必要开发一种能全面定量研究刚体转动陀螺特性的实验装置。
技术实现思路
1、本发明的目的在于提供一种定量研究刚体转动陀螺仪的实验装置及使用方法,该装置可调节自转轮的转速、砝码的质量及力臂长度,进而实现自转角速度和重力矩的连续调节,能很好地用于定量研究刚体转动陀螺仪的运动规律。
2、为实现上述目的,本发明采用了如下技术方案:
3、一种定量研究刚体转动陀螺仪的实验装置,包括:
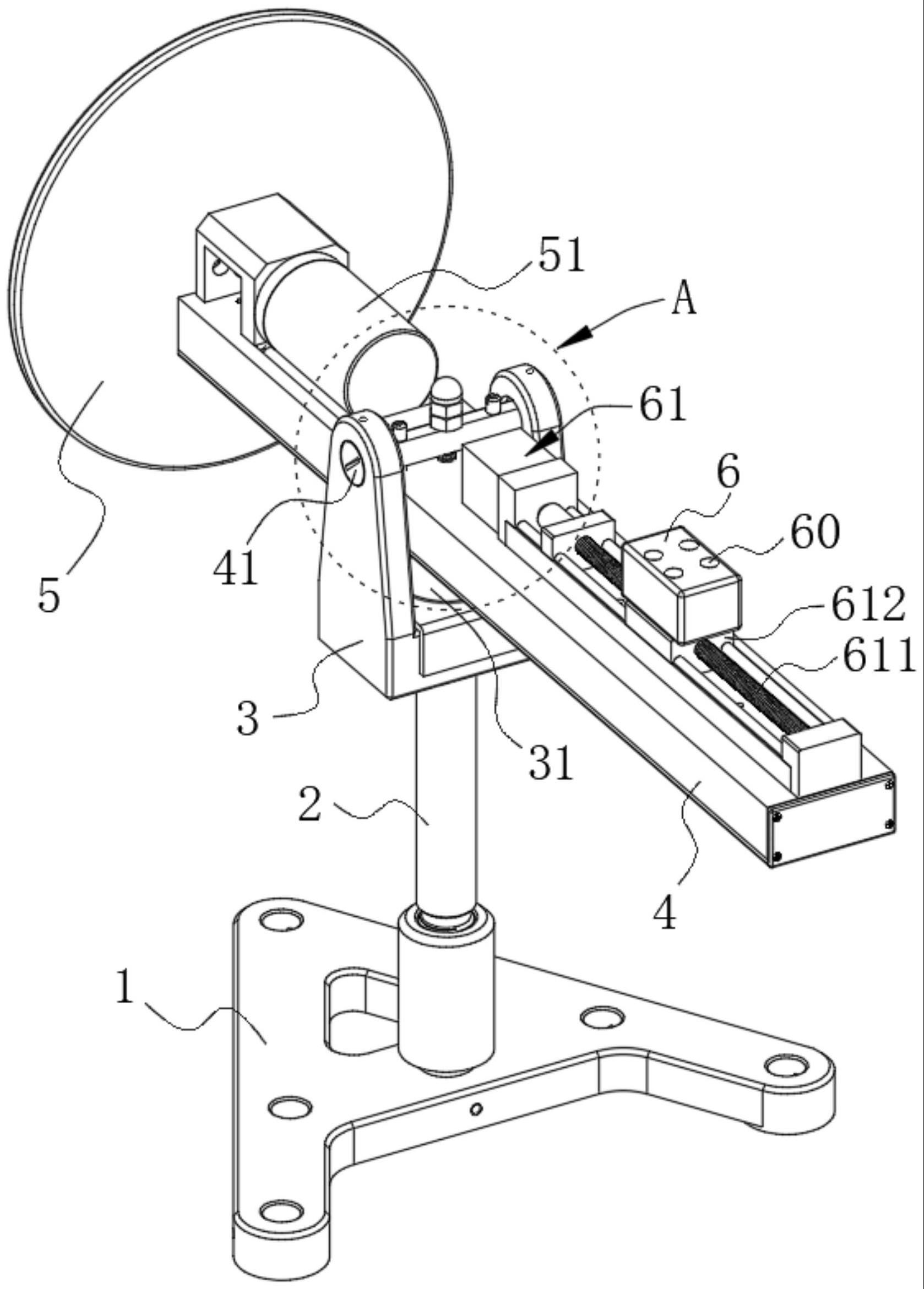
4、支撑杆,其竖向设置;
5、连接座,经进动轴承安装于所述支撑杆的上端,所述连接座可绕所述支撑杆水平转动;
6、横杆(4),其中部经俯仰轴承安装于所述连接座上,所述横杆可在竖直方向上下摆动;
7、自转轮,可转动地安装于所述横杆的一端;
8、砝码,滑动且可拆卸地安装在所述横杆上,所述砝码的滑动范围被限定在所述横杆的另一端与所述俯仰轴承之间的区域;
9、第一驱动机构和第二驱动机构,所述第一驱动机构与所述自转轮连接,用以驱动所述自转轮转动;所述第二驱动机构安装于所述横杆上,且与所述砝码相连接,用以驱动所述砝码沿所述横杆的长度方向往复移动。
10、在本技术的一种实施例中,还包括电池,所述电池与所述第一驱动机构、第二驱动机构电性连接。
11、在本技术的一种实施例中,还包括:
12、第一传感器,安装于所述横杆上,用于测量所述自转轮的转速或角速度;
13、第二传感器,安装于所述连接座或横杆上,用于测量所述连接座的转速或角速度;
14、第三传感器,安装于所述横杆上,用于测量所述横杆的俯仰角度、俯仰频率或俯仰角速度。
15、在本技术的一种实施例中,还包括控制终端和与所述控制终端无线通讯连接的无线通讯控制模块,所述无线通讯控制模块安装于所述横杆内,与所述第一传感器、第二传感器、第三传感器、第一驱动机构和第二驱动机构电性连接。
16、在本技术的一种实施例中,所述第二驱动机构为丝杠电机,所述丝杠电机与设置在所述横杆上的丝杆传动连接,所述丝杆与滑块转动连接,其中,所述砝码安装于所述滑块上。
17、在本技术的一种实施例中,所述砝码包括若干不同质量的多块,任一所述砝码均能可拆卸的安装于所述滑块上。
18、在本技术的一种实施例中,所述连接座呈类u型结构,其底部经所述进动轴承与所述支撑杆的上端同轴转动连接;
19、还包括俯仰轴,所述俯仰轴水平设置,两端分别经所述俯仰轴承转动安装于所述连接座上部;所述横杆穿设与所述连接座的类u型槽口内,经连接杆与所述俯仰轴相连接。
20、定量研究刚体转动陀螺仪的实验装置的使用方法:
21、(一)当研究自转角速度与进动角速度的关系时,所述方法包括如下步骤:
22、s1-1、调节所述第二驱动机构,使所述砝码偏离平衡位置;
23、s1-2、调节所述第一驱动机构,使所述自转轮的转速改变;
24、s1-3、测量所述连接座的进动角速度和所述自转轮的自转角速度获得进动角速度随自转角速度的变化关系;
25、或者,
26、(二)当研究重力矩与进动角速度的关系时,所述方法包括如下步骤:
27、s2-1、调节所述第一驱动机构,驱动所述自转轮高速自转;
28、s2-2、调节重力矩:调节所述第二驱动机构驱动所述砝码改变位置,或者更换不同质量的所述砝码;
29、s2-3、获取重力矩的变化数据,并测量所述连接座(3)的进动角速度获得进动角速度所随重力矩的变化关系;
30、或者,
31、(三)当研究自转轮的转动惯量i0时,所述方法包括如下步骤:
32、s3-1、将所述步骤s1-3和s2-3测得的数据进行线性拟合,根据线性拟合的斜率获得所述自转轮的转动惯量i0;
33、或者,
34、(四)当研究自转角速度与章动频率f的关系时,所述方法包括如下步骤:
35、s4-1、调节重力矩,使所述连接座发生进动;
36、s4-2、对所述横杆施加瞬时力矩,所述横杆发生章动;
37、s4-3、调节所述第一驱动机构驱动所述自转轮改变自转角速度
38、s4-4、测量所述横杆(4)的章动频率f和自转轮(5)的自转角速度获得章动频率f随自转角速度的变化关系;
39、或者,
40、(五)当研究非规则分布陀螺仪的整体转动惯量i时,所述方法包括如下步骤:
41、s5-1、将所述步骤s4-4测得的数据进行线性拟合,根据线性拟合的斜率获得整体转动惯量i;
42、或者,
43、(六)当研究陀螺的阻尼系数β时,所述方法包括如下步骤:
44、s6-1、调节重力矩,使所述连接座发生进动;
45、s6-2、对所述横杆施加瞬时力矩,所述横杆发生章动;
46、s6-3、记录一段时长的进动及章动数据,进行拟合,得到陀螺的阻尼系数β;
47、或,
48、(七)当演示陀螺的定轴现象时,所述方法包括如下步骤:
49、s7-1、调节重力矩,使陀螺处于平衡状态;
50、s7-2、调节所述第一驱动机构,使所述自转轮高速自转;
51、s7-3、随意转动所述支撑杆,观察所述横杆及自转轮的稳定性。
52、在本技术的一种实施例中,所述进动角速度与所述自转角速度及重力矩的相关关系公式为:
53、
54、其中,δl为砝码偏离平衡位置的距离;m为砝码的质量;mgδl为重力矩;i0为自转轮的转动惯量。
55、在本技术的一种实施例中,所述章动频率f与所述自转角速度及整体转动惯量i的相关关系公式为:
56、
57、所述横杆的章动角速度与时间t的变化数据可采用如下公式进行拟合:
58、
59、其中,a、β、ω、α和c均为拟合常数;
60、连续监测的章动角速度与时间t的变化数据,可拟合获得章动频率f=ω/2π;
61、根据章动频率f与自转角速度的测量数据进行拟合,可获得非规则分布陀螺仪的整体转动惯量i;
62、同样地,通过连续监测的章动角速度与时间t的变化数据,可拟合测得陀螺的阻尼系数β。
63、与现有技术相比,本发明的有益效果是:
64、1、本技术定量研究刚体转动陀螺仪的实验装置,可通过调节自转轮的转动、砝码的质量、以及力臂长度(砝码的位置),实现自转角速度和重力矩连续、稳定的调节,便于进行自转与进动关系、重力矩与进动关系、自转与章动关系、章动衰减、及转动惯量等的定量研究,该装置结构简单,设置合理,能定量调节运行,便于更好地演示刚体转动陀螺仪的特性及运动规律。
65、2、本技术公开的实验装置设置第一传感器、第二传感器和第三传感器,实时测量自转轮的转速或角速度、连接座的转速或角速度(即进动角速度)和横杆的俯仰角度、俯仰频率或俯仰角速度(即章动角度、章动频率、章动角速度)的数值变化,实现对刚体转动陀螺仪运动过程中各物理量的定量监测,更好地进行刚体转动陀螺仪运动规律的展示,便于更深入的进行定量研究和教学。
66、3、该装置采用电池供电,并采用无线通讯的方式控制和采集数据,有效避免了设置导线对该装置运行及定量测量的干扰。
67、4、通过该定量研究刚体转动陀螺仪的实验装置及使用方法,可定性及定量研究自转角速度与进动角速度的关系、研究重力矩与进动角速度的关系、研究自转轮的转动惯量、研究自转角速度与章动频率的关系、研究非规则分布陀螺仪的整体转动惯量、研究陀螺的阻尼系数、及演示陀螺的定轴现象等,操作方便,功能晚上。
- 还没有人留言评论。精彩留言会获得点赞!