一种用于小册子的翻页装置的制作方法
1.本实用新型属于包装设备技术领域,具体涉及一种用于小册子的翻页装置。
背景技术:
2.在食品医药等对产品质量控制要求严格的领域,产品箱包装过程中需要将一端封胶的小册子(如合格证、说明书等)撕下放入药品箱内,确保合格证等序号顺序连贯便于对质量的控制管理,现有通常的做法大部分是采用人工一张一张撕下放入,费时费力,或采用吸盘式的设备,容易造成一次吸附放置多张小册子纸的问题,误差大。
技术实现要素:
3.本实用新型要解决的技术问题是:提供一种用于小册子的翻页装置,以解决现有技术问题中存在的问题。
4.本实用新型的技术方案: 一种用于小册子的翻页装置,包括分页滚轮和分页电机,分页滚轮固定连接在轮轴上,轮轴与分页电机的电机轴固定连接,分页电机固定连接在竖直板一侧,竖直板下端固定连接在支撑架后端,支撑架固定连接在支撑板上,竖直板前侧安装有电动升降机构,电动升降机构上安装有小册子放置槽,分页滚轮正对小册子放置槽宽度方向中部且位于小册子放置槽上方右侧。
5.优选的,上述升降机构包括导轨、滑块、丝杠和丝母,导轨安装在安装板上,与导轨使用的配合滑块固定连接在小册子放置槽侧面,丝杠两端通过轴承座固定连接在安装板上下部且一端伸出后固定连接有升降电机的电机轴,升降电机固定安装在安装板上,与丝杠相配合使用的丝母固定连接在滑块上,安装板固定安装在竖直板上。
6.优选的,上述小册子放置槽包括两块l型截面板、塑胶板和底板,两块l型截面板的槽口放置有塑胶板,相对放置的两块l型截面板之间放置有底板并通过螺栓固定连接构成小册子放置凹槽,底板一端设置有限位台且限位台位于分页滚轮另一端。
7.优选的,上述支撑架包括立柱和横梁,横梁通过两根立柱固定连接在支撑板上且位于多自由度机器人左侧,竖直板安装在横梁后端。
8.优选的,上述分页滚轮柱面套接有橡胶层。
9.优选的,上述支撑架上固定连接有折弯支撑架,折弯支撑架顶端固定连接有搁置机械手自由端的橡胶条。
10.优选的,上述分页滚轮上方安装有探测其被翻起状态的探测传感器一,小册子放置槽底部安装有探测小册子是否用完的探测传感器二。
11.本实用新型的有益效果:与现有技术相比,本实用新型有如下效果:
12.(1)本实用新型采用滚轮能够翻起单页小册子呈拱起或翻起状态,翻起或拱起状态便于机器人夹持取走,采用电动升降的小册子放置槽配合分页滚轮以及分页电机,翻页精确稳定,翻页快速;
13.(2)采用丝杠丝母和滑块导轨结构,能够实现小册子放置槽高度的精确调节,便于
精确控制分页滚轮与小册子的接触力大小,升降调节稳定可靠;
14.(3)套接橡胶层,增加摩擦力,分页更稳定可靠;
15.(4)设置探测传感器一和探测传感器二,能够分别探测纸张翻起状态和小册子到位情况。
附图说明
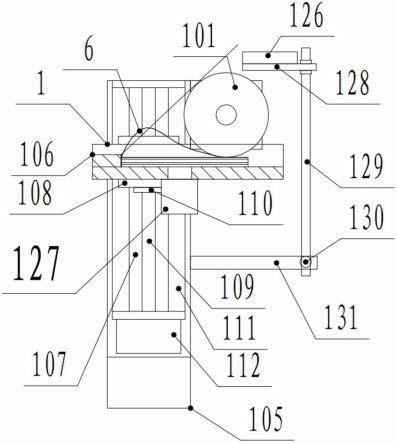
16.图1为分页装置结构示意图;
17.图2为分页装置俯视结构示意图;
18.图3为翻译机构结构示意图;
19.图4为小册子放置槽结构示意图。
具体实施方式
20.现结合如下实例对本实用新型作进一步的解释说明。
21.实施例1:如图1-4所示,一种用于小册子的翻页装置,包括分页滚轮101和分页电机102,分页电机102采用步进电机,分页滚轮101通过螺母固定连接在轮轴103上,轮轴103与分页电机102的电机轴通过联轴器121固定连接,分页电机102固定连接在电机安装板120上,电机安装板120焊接在竖直板104上部一侧,竖直板104下端固定连接在支撑架105后端,支撑架105固定连接在支撑板3上,竖直板104前侧安装有电动升降机构,电动升降机构上安装有小册子放置槽106,分页滚轮101正对小册子放置槽106宽度方向中部且位于小册子放置槽106上方右侧,分页滚轮101接触单页小册子长度方向的自由端与中部之间位置(大概四分之三位置),采用电动升降的小册子放置槽配合分页滚轮以及分页电机,翻页精确稳定,翻页快速。
22.优选的,上述升降机构包括导轨107、滑块108、丝杠109和丝母110,导轨107安装在安装板111上,与导轨107使用的配合滑块108固定连接在小册子放置槽106侧面,丝杠109两端通过轴承座固定连接在安装板111上下部且一端伸出后固定连接有升降电机112的电机轴,升降电机112固定安装在安装板111上,与丝杠109相配合使用的丝母110固定连接在滑块108上,安装板111固定安装在竖直板104上,升降电机112采用步进电机,采用丝杠丝母和滑块导轨结构,能够实现小册子放置槽高度的精确调节,便于精确控制分页滚轮与小册子的接触力大小,升降调节稳定可靠。
23.优选的,上述小册子放置槽106包括金属材料制作的两块l型截面板113、塑胶板114和底板115,两块l型截面板113的槽口放置有塑胶板114,相对放置的两块l型截面板113之间放置有底板115并通过螺栓116固定连接构成小册子放置凹槽,底板115一端设置有限位台117且限位台117位于分页滚轮101另一端,小册子放置槽结构简单,螺栓连接的可拆卸结构,便于针对不同大小的小册子进行适应性的凹槽大小调节,设置限位台便于快速放置封胶的小册子。
24.优选的,上述支撑架105包括方管制作的立柱118和方管制作的横梁119,横梁119通过两根立柱118固定连接在支撑板3上且位于多自由度机器人2左侧,竖直板104安装在横梁119后端,该结构简单,支撑稳定可靠,也便于将多自由度机器人不使用时,将机器人的机械臂搁置在横梁上,横梁上方可以防止橡胶层,起到缓冲保护作用,避免损坏机械臂。
25.优选的,上述分页滚轮101柱面套接有橡胶层,增加摩擦力,分页更稳定可靠。
26.实施例2:如图1-4所示,一种药厂用小册子分页装置,包括翻页机构1和多自由度机器人2,翻页机构1安装在支撑台3后侧,多自由度机器人2安装在支撑台3右侧,多自由度机器人2的执行端安装有气动手指4,采用翻页机构翻起单页小册子6呈拱起状态或翻起状态(即搭接在翻页机构上),采用多自由度机器人配合气动手指夹持拱起或翻起的小册子进行撕裂,撕裂后将其放入到药品放置箱或输送带上,完成单页小册子的分页,省时省力,劳动强度大大降低,效率高,分页精确,规避一次多张导致的误差问题。
27.优选的,上述多自由度机器人2至少设置有三个自由度,采用佛山市指擎科技有限公司的指擎桌面3轴机械手臂工业机器人,包括旋转底座、安装在旋转底座上的俯仰臂一和与俯仰臂一铰接的俯仰臂二,气动手指安装在俯仰臂二的末端。
28.优选的,上述翻页机构1包括分页滚轮101和分页电机102,分页电机102采用步进电机,分页滚轮101通过螺母固定连接在轮轴103上,轮轴103与分页电机102的电机轴通过联轴器121固定连接,分页电机102固定连接在电机安装板120上,电机安装板120焊接在竖直板104上部一侧,竖直板104下端固定连接在支撑架105后端,支撑架105固定连接在支撑板3上,竖直板104前侧安装有电动升降机构,电动升降机构上安装有小册子放置槽106,分页滚轮101正对小册子放置槽106宽度方向中部且位于小册子放置槽106上方右侧,分页滚轮101接触单页小册子长度方向的自由端与中部之间位置(大概四分之三位置),采用电动升降的小册子放置槽配合分页滚轮以及分页电机,翻页精确稳定,翻页快速。
29.优选的,上述升降机构包括导轨107、滑块108、丝杠109和丝母110,导轨107安装在安装板111上,与导轨107使用的配合滑块108固定连接在小册子放置槽106侧面,丝杠109两端通过轴承座固定连接在安装板111上下部且一端伸出后固定连接有升降电机112的电机轴,升降电机112固定安装在安装板111上,与丝杠109相配合使用的丝母110固定连接在滑块108上,安装板111固定安装在竖直板104上,升降电机112采用步进电机,采用丝杠丝母和滑块导轨结构,能够实现小册子放置槽高度的精确调节,便于精确控制分页滚轮与小册子的接触力大小,升降调节稳定可靠。
30.优选的,上述小册子放置槽106包括金属材料制作的两块l型截面板113、塑胶板114和底板115,两块l型截面板113的槽口放置有塑胶板114,相对放置的两块l型截面板113之间放置有底板115并通过螺栓116固定连接构成小册子放置凹槽,底板115一端设置有限位台117且限位台117位于分页滚轮101另一端,小册子放置槽结构简单,螺栓连接的可拆卸结构,便于针对不同大小的小册子进行适应性的凹槽大小调节,设置限位台便于快速放置封胶的小册子。
31.优选的,上述支撑架105包括方管制作的立柱118和方管制作的横梁119,横梁119通过两根立柱118固定连接在支撑板3上且位于多自由度机器人2左侧,竖直板104安装在横梁119后端,该结构简单,支撑稳定可靠,也便于将多自由度机器人不使用时,将机器人的机械臂搁置在横梁上,横梁上方可以防止橡胶层,起到缓冲保护作用,避免损坏机械臂。
32.优选的,上述分页滚轮101柱面套接有橡胶层,增加摩擦力,分页更稳定可靠。
33.一种用于小册子的翻页装置还包括安装在支撑台3上的输送带5,位于多自由度机器人2左侧,便于将小册子输送到机器人执行端无法覆盖的范围的包装箱。
34.优选的,上述支撑架105上固定连接有折弯支撑架122,折弯支撑架122顶端固定连
接有搁置机械手自由端的橡胶条123,能够提高放置高度,减少机器人的抬升距离,放置稳定可靠。
35.优选的,上述分页滚轮101上方安装有探测其被翻起状态的探测传感器一126,探测传感器一126固定连接在水平板128上,水平板128右端设置套筒,套筒通过双螺母固定连接在竖直杆129上,竖直杆129下端设置套筒,套筒通过双螺母固定连接在横向杆130端部,横向杆130后端设置套筒,套筒通过双螺母固定连接在纵向杆131端部,纵向杆131固定连接在竖直板后侧面上,小册子放置槽106底部设置有通孔,通孔处底部通过连接安装板安装有探测小册子是否用完的探测传感器二127且其探头正对通孔,能够实现小册子翻起状态和是否放置到位的探测。
36.优选的,上述支撑架105正对输送带3处安装有吹气喷头124,吹气喷嘴的气流将夹持的纸张保持平整状态,能够将机器人夹持的纸张平躺放置在输送带上,避免歪斜导致的探测不精确,输送带3上安装有探测机械手是否将纸张落入输送带上的探测传感器三125,探测传感器三125固定连接在竖直板上,竖直板固定连接在横向水平杆132上,横向水平杆132后端设置套筒,套筒通过双螺母固定连接在皮带处竖直杆133上,皮带处竖直杆133固定连接在输送带的机架上,输送带靠后侧的机架上安装有倒立的v字形滑落板,机器人夹持的纸张掉落到滑落板后自动掉入皮带机上,滑落板相对一侧设置有挡板,避免掉出输送带,吹气喷嘴连接到电磁阀,电磁阀连接到气泵或气源。
37.分页电机、升降电机和机器人连接到控制终端,控制终端还连接到探测传感器一、探测传感器二、探测传感器三、人机交互模块(数显和按键)、报警器和吹气喷嘴连接的电磁阀,能够实现整个装置的自动控制。
38.实施例3:一种小册子分页装置的分页方法,该方法包括以下步骤:
39.(1)开机前,放置一端胶封的小册子到小册子放置槽内且胶封一端朝向小册子放置槽定位一侧,手动调节分页滚轮与小册子之间距离,确保滚轮滚动过程中能够将小册子的纸张摩擦翻起即可;
40.(2)当调节好分页滚轮按压小册子上端面时,开机,启动分页电机分页,分页滚轮开始旋转,探测传感器二探测是否有合格证,若有,进入下一步,反之,进行报警提醒;
41.(3)分页滚轮使得待分页的单页小册子拱起直到搭接到分页滚轮上,探测传感器一探测是否有纸张被翻起,若有进入下一步,反之,控制电动驱动升降机构进行抬升,直到探测到有纸张被翻起为止,进入下一步;
42.(4)多自由度机器人按照设定的规划路径(采用机器人自动记忆功能或者建立数学模型(执行端终点坐标已知)等方式设置)进行行走,气动手指夹持固定翻起(翻起的小册子自由端部会搭接在分页滚轮上,从而在小册子封胶处于滚轮之间形成气动手指的夹持间隙)的小册子后控制多自由度机器人旋转臂动作将其撕裂,摆动到输送带上方或药品放置箱上方松开气动手指,单页小册子掉落(输送带输送到药品包装箱或者直接落入包装箱);
43.(5)若掉落到输送带上,探测传感器三探测是否到位,控制皮带机行走,将其送入到药品箱,若未到位,进行报警提醒,反之,进入下一步;
44.(6)电动驱动升降机构带动小册子放置槽上移一张小册子的厚度,重复前述过程,完成下一张小册子的撕裂和放入输送带或药品放置箱,若完成小册子的分页后,停机,按照步骤1-6重复。
45.分页装置具有如下优点:
46.(1)采用翻页机构翻起单页小册子呈拱起或翻起状态,采用多自由度机器人配合气动手指夹持拱起或翻起的小册子(如一端封胶的合格证)进行撕裂,撕裂后将其放入到药品放置箱或输送带上,完成单页小册子的分页,省时省力,劳动强度大大降低,效率高,分页精确,规避一次多张导致的误差问题;
47.(2)采用电动升降的小册子放置槽配合分页滚轮以及分页电机,翻页精确稳定,翻页快速;
48.(3)采用丝杠丝母和滑块导轨结构,能够实现小册子放置槽高度的精确调节,便于精确控制分页滚轮与小册子的接触力大小,升降调节稳定可靠;
49.(4)套接橡胶层,增加摩擦力,分页更稳定可靠;
50.(5)设置输送带便于将小册子输送到机器人执行端无法覆盖的范围的包装箱;
51.(6)吹气喷嘴的气流将夹持的纸张保持平整状态,能够将机器人夹持的纸张平躺放置在输送带上,避免歪斜导致的探测不精确;
52.(7)设置探测传感器一、探测传感器二和探测传感器三,能够分别探测纸张翻起状态、小册子到位情况和纸张掉落到输送带上的情况。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1