一种工业机器人操作与运维考证设备的制作方法
1.本实用新型涉及实训教学技术领域,尤其涉及一种工业机器人操作与运维考证设备。
背景技术:
2.随着工业的发展的深度,简单的课程以不能应对复杂的工业现状;面向机器人的实训教育也变得越来越重要,急需对学员的机器人操作、运维运用能力进行培养,机器人考证考试也应运而生,迫切需要对学习机器人操作、运维的考试设备。
技术实现要素:
3.本实用新型提供一种工业机器人操作与运维考证设备,为实训教育考试提供考试设备。
4.本实用新型采用以下技术方案:
5.一种工业机器人操作与运维考证设备,其特征在于,包括:机柜、设置在机柜内部的电气控制模块、以及设置在机柜上方工业机器人和考试功能模块;电气控制模块与考试功能模块电连接,考试功能模块与机柜活动连接以满足考试项目删减需求。
6.所述考试功能模块包括立库模块,立库模块包括支架,支架底部设有安装在所述机柜上方的底座,支架相对两侧设置把手;支架中央设置一立库电机,其输出轴通过轴承连接一转盘,转盘上设置用于放置物料的工位,转盘一侧设置库存传感器。
7.所述考试功能模块包括码垛模块、装配模块和轨迹模块,三者垂直叠放,每个模块下方设置托架,托架相对两侧设置把手;相邻模块的托架可拆卸连接;底层托架与一安装座可拆卸连接,该安装座可拆卸与所述机柜顶部连接。
8.所述考试功能模块包括模拟焊接模块,模拟焊接模块包括电机、与电机输出轴端部连接的安装座,安装座用于安装工件。
9.所述考试功能模块包括模拟压铸模块,模拟压铸模块包括用于依次落入工位的工件物料通道和两个气缸,该通道一侧设置第一压铸板,压铸板上设置通孔,通道一侧设置的气缸将就位的工件推出通孔,通道相对一侧的气缸推压第二压铸板,气缸的推板、第一压铸板和第二压铸板合模压铸工件。
10.所述考试功能模块包括模拟打磨模块,模拟打磨模块包括气缸、与气缸连接的防屑罩、电机以及与电机连接的打磨头,防屑罩设置在打磨头的上方,随气缸活塞的移动带动防屑罩遮住和露出打磨头。
11.所述机柜侧壁上设置通风口,通风口处设置风扇。
12.所述电气控制模块在机柜内是活动抽拉方式可以拉出机柜。
13.所述机柜的顶部周围设置围合的线槽,所述考试功能模块的模块与所述电气控制模块之间通过线槽走线。
14.有益效果
15.本实用新型符合了《工业机器人操作与运维职业技能等级标准》三/四级的考核标准,使学员更直观地对搬运、压铸、装配、抛光、打磨、弧焊、点焊、视觉、仓储等工序以及电气自动化中的人机界面、视觉检测、plc、系统集成和远程控制等建立清晰理解,不仅方便考试使用,还可以方便老师教学和学员的学习,有效的提高了学习效率和学习的积极性,同时提高了学生们的动手和排故、维修的能力。
附图说明
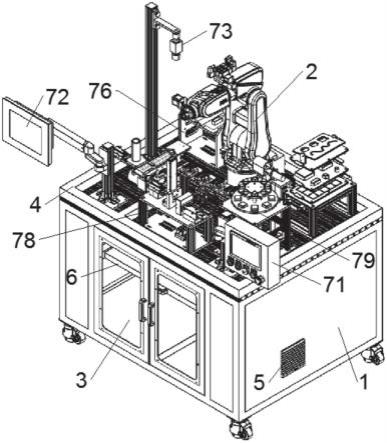
16.图1是本实用新型实施例提供的一种工业机器人操作与运维考证设备的总装结构示意图;
17.图2是本实用新型实施例提供的立库模块的爆炸结构示意图;
18.图3是本实用新型实施例提供的码垛模块、装配模块和轨迹模块的爆炸结构示意图;
19.图4是本实用新型实施例提供的模拟焊接模块的爆炸结构示意图;
20.图5是本实用新型实施例提供的模拟压铸模块的爆炸结构示意图;
21.图6是本实用新型实施例提供的模拟打磨模块的爆炸结构示意图。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
23.参见图1,是本实用新型提供的一种工业机器人操作与运维考证设备,其包括机柜1、设置在机柜内部的电气控制模块、以及设置在机柜上方工业机器人2 和考试功能模块。
24.工业机器人,为六轴机器人具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能的机构。
25.机柜的侧面设置可打开的门3,方便检测、维修电气控制模块。
26.机柜的顶部周围设置围合的线槽4,可选地,线槽围合内部可以加装线槽。考试功能模块的模块与模块之间通过线槽走线达到连接通讯的效果,互不干涉,大大方便了后续的诊断以及维修学习。
27.机柜相对两侧壁设置通风口5,通风口处设置风扇,可保证设备在运行时,且亚克力门关闭时起到散热通风等作用。机柜侧壁还配置挂钩以及电源线缆口,挂钩用于示教器的放置,便于操作,并底部采用福马轮,可以很方便的进行自由移动,同时福马轮也具有带锁功能,能起到固定的作用。
28.机柜的内部设置钣金件6,钣金件两侧设置阻尼缓冲轨道,电气控制模块通过螺丝锁定在钣金件上,实现抽拉式电控盘,抽出来可以很清晰、很直观的观察到各个元器件的结构、接线情况,便于考试者检测、维修。
29.电气控制模块为设备提供电源以及可编程控制器连接各个模块与执行器 (气缸)的信号,进行逻辑运算和算法处理。
30.考试功能模块包括可编程控制器(plc)未示出、触摸屏71、视觉终端72、视觉模块73、夹具模块、供料模块、模拟焊接模块76、模拟打磨模块77、模拟压铸模块78、立库模块79、码垛模块81、装配模块82和轨迹模块83,各模块的底部可拆卸安装,根据考试内容安装对应
考察的知识点。
31.立库模块79包括支架791,支架底部设有安装在机柜上方的底座792,支架相对两侧设置把手,方便更换整体的立库模块。支架中央设置一立库电机793,其输出轴通过轴承连接一转盘,转盘794上用于放置物料的工位,转盘一侧设置库存传感器,库存传感器795检测到工位上放置工件,输出信号控制立库电机驱动转盘至下一工位,等待物料放置。
32.码垛模块、装配模块和轨迹模块三者从下到上依次垂直叠放设置,码垛模块下方设置第一托架811,装配模块下方设置第二托架821,轨迹模块下方设置第三托架831,三托架分别相对设置把手,方便模块更换还,四角处则设置螺栓或其他连接方式,三托架之间依次垂直固定,第一托架下方还设置承托安装座,承托安装座下方是支撑架84,支撑架的底部设置安装到机柜顶部的安装座,支撑架相对两侧设置把手,方便将码垛模块、装配模块和轨迹模块整体结构的拆装,节省机柜顶部布置考试功能模块的空间。
33.模拟焊接模块76包括电机761、与电机输出轴端部连接的矩形安装座762,该安装座可以是环形、三角形等多种形状,保证工件的稳定连接,以及正反面露出;矩形安装座的在其周边安装工件763,机器人持焊枪到工件处焊接,电机带动工件围绕电机输出轴旋转,实现工件360度旋转,焊枪可以在工件上,也可以穿过矩形安装座进行焊接。现有技术中由于工业机器人机械限位以及布局的限制无法实现工业机器人持枪360度焊接,通过该模拟焊接模块使工件360 度旋转配合工业机器人焊枪角度的方案,突破了工业机器人焊枪机械限位的限制。
34.模拟压铸模块78,包括用于依次落入工位的工件物料通道781和两个气缸,该通道一侧设置第一压铸板7811,第一压铸板上设置通孔7812,通道一侧设置的气缸782将就位的工件推出通孔,通道相对一侧的气缸783推压第二压铸板 7831压住工件,工件在两气缸的压力下利用气缸的推板、第一压铸板和第二压铸板合模压铸工件。第一压铸板对第二压铸板有限位和压铸两个作用。
35.模拟打磨模块77,包括气缸771、与气缸连接的防屑罩772、电机773以及与电机连接的打磨头774,非工作状态下,气缸与防屑罩设置在打磨头的后方,工作状态下,打磨头打磨工件,气缸将防屑罩推出罩住打磨头的上方,防止打磨碎屑飞溅,保证安全。
36.工作时,码垛考试时,装配模块和轨迹模块进行拆卸,仅留码垛模块。供料模块为井式送料机构和传送带,井式送料机构送至传送带运输,视觉模块为工业相机,采集图像判断工件是否就位,工件被输送至工位后工业机器人获取吸盘夹具,拾取工位上的工件至码垛模块。此外,视觉模块,还会判断形状以及颜色,并对不同颜色的物料进行分类放置。
37.压铸考试时,模具准备,第一压铸板和第二压铸板在气缸带动下合模、开模,工业机器人获取气动夹具拾取压铸后的工件,放置立库模块,库存传感器当检测到立库模块转盘的工位物料满仓时,可以输出信号满仓提醒。
38.轨迹考试时,装配好轨迹模块,工业机器人拾取tcp工具在轨迹模块上画圆、画方和画弧。
39.装配考试时,将装配模块设置到最顶层,工业机器人获取吸盘工具,拾取工件至模拟打磨模块,将打磨好的工件在装配模块处进行装配。
40.焊接考试时,工业机器人拾取焊枪,将模拟焊接模块处旋转的工件进行焊接,可进行点焊、弧焊。
41.电气控制模块包括工业机器人、可编程控制器(plc)、触摸屏、视觉终端、视觉模块、供料模块、模拟焊接模块、模拟打磨模块、模拟压铸模块和立库模块。
42.触摸屏可通过plc驱动工业机器人进行不同夹具完成不同上述考试,视觉模块采集图像用于控制视觉检测物料是否到工位处,并将数据传输给plc,以控制工业机器人下一步动作。
43.可选地,视觉终端的输出端连接视觉模块的输入端,视觉终端与plc连接。视觉终端可以直接修改视觉程序内部数据,修改完后输出结果,将结果信息直接发给plc,plc通过结果信息进行判断,做出对应响应的,完成plc与视觉终端的交互,编制视觉程序控制视觉模块采集数据、数据显示、图像分析和图形处理等功能。
44.触摸屏连接plc,对工业机器人操作与运维考证设备运行程序进行选择、i/o 及报警监控,其上的按钮用于程序启动、停止、复位及紧急停止操作,用于控制设备和显示设备状态。
45.plc分别连接供料模块、模拟焊接模块、模拟打磨模块和模拟压铸模块, plc控制传送带驱动电机启停,可选地plc控制模拟焊接模块的电机启停,可选地plc控制模拟打磨模块的气动电磁阀来驱动气缸启停,可选地plc控制模拟压铸模块的气动电磁阀来驱动气缸启停。
46.可选地,本实用新型一种工业机器人操作与运维考证设备还可以作为实训设备。
47.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1