无人机控制原理演示教具的制作方法
本技术涉及无人机教学,尤其是涉及无人机控制原理演示教具。
背景技术:
1、无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
2、现有的技术中,市面上缺乏可以用于科普无人机飞行原理的教具,更没有可以系统的直观演示的科普教具。因此,导致很多学生只能在书中学习无人机控制的原理,无法在实践中理解无人机的飞行原理,降低了学生的学习兴趣与积极性。
技术实现思路
1、针对现有技术存在的不足,本实用新型的目的是提供无人机控制原理演示教具,其能够清晰的演示无人机的飞行姿态,并能够直接的说明无人机的飞行原理,从而提高了学生对于无人机的学习兴趣与积极性。
2、本实用新型的上述实用新型目的是通过以下技术方案得以实现的:
3、无人机控制原理演示教具,包括升力演示装置、反扭演示装置以及姿态演示装置;
4、所述升力演示装置用于演示及探究无人机旋翼的工作原理;
5、所述反扭演示装置用于演示及探究无人机控制自旋的工作原理;
6、所述姿态演示装置用于演示及探究无人机各轴状态对姿态的整体控制原理。
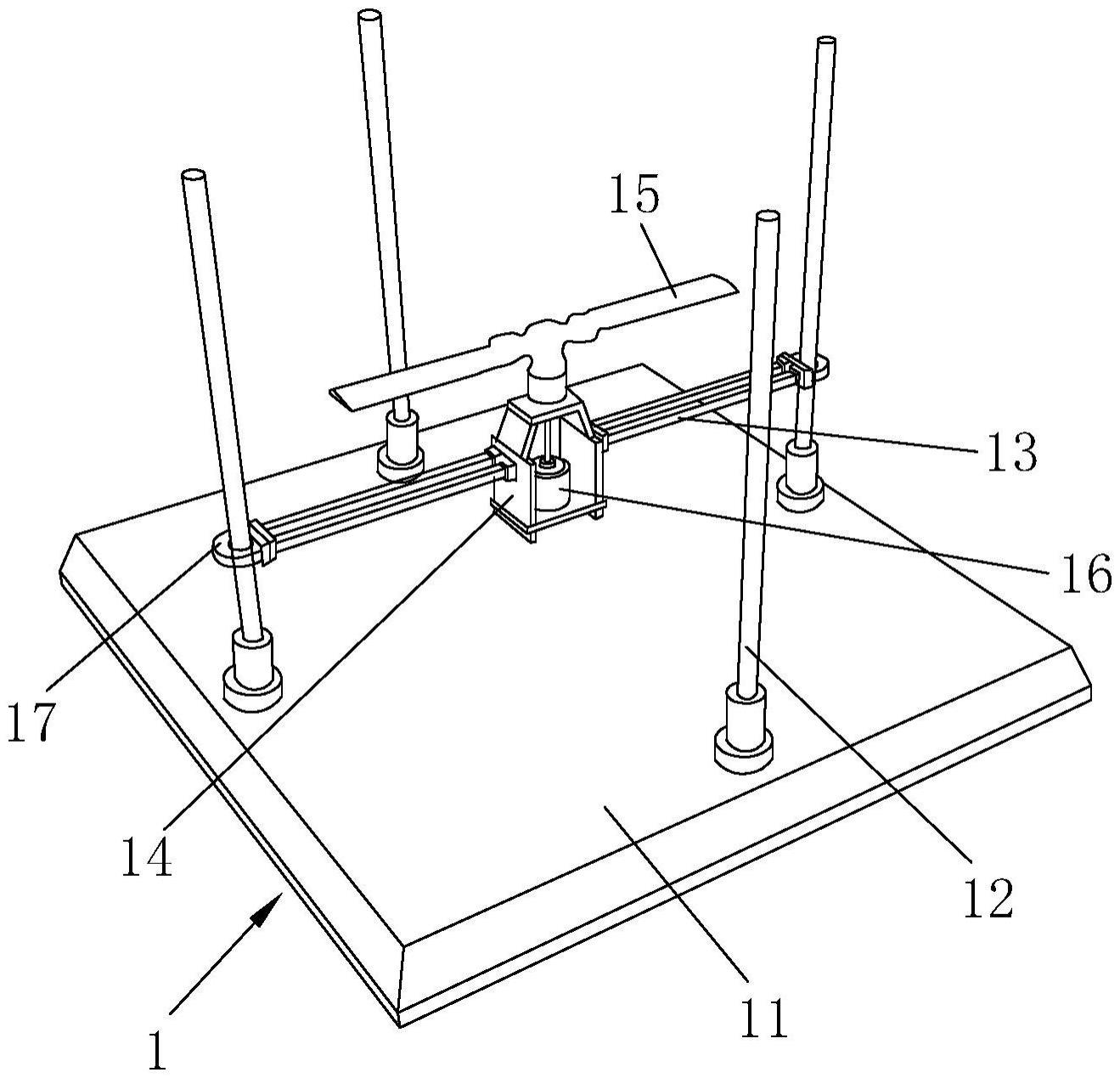
7、本实用新型在一较佳示例中可以进一步配置为:所述升力演示装置包括第一底板、四个立柱、固定杆、升力座、旋翼以及无刷电机,四个所述立柱垂直固定在所述第一底板上且分别分布于靠近所述第一底板的四个边沿上;
8、所述固定杆的两端分别可拆卸固定在相对的两个所述立柱上,所述升力座安装在所述固定杆的中间位置处,所述旋翼安装在所述升力座的上方,所述无刷电机固定在所述升力座内,所述无刷电机的输出轴与所述旋翼传动连接。
9、本实用新型在一较佳示例中可以进一步配置为:所述固定杆的两端分别设置有滑动环,所述滑动环上开设有与所述立柱过渡配合的通孔。
10、本实用新型在一较佳示例中可以进一步配置为:所述反扭演示装置包括直升机反扭矩演示仪与多旋翼反扭矩演示仪,所述直升机反扭矩演示仪用于演示直升机克服反扭矩时的状态,所述多旋翼反扭矩演示仪用于演示多旋翼无人机克服反扭矩时的状态。
11、本实用新型在一较佳示例中可以进一步配置为:所述直升机反扭矩演示仪包括第二底板、旋翼控制器、支撑座、支撑杆以及导电滑环,直升机通过所述导电滑环安装在所述支撑杆的顶端,所述支撑杆的另一端通过所述支撑座垂直固定在所述第二底板上,所述旋翼控制器安装在所述第二底板上,所述旋翼控制器通过电线与所述直升机控制连接。
12、本实用新型在一较佳示例中可以进一步配置为:所述多旋翼反扭矩演示仪与所述直升机反扭矩演示仪的结构相同,多旋翼无人机的多旋翼安装在支撑杆上。
13、本实用新型在一较佳示例中可以进一步配置为:所述支撑座呈花瓣状,所述支撑座的四周固定连接有固定板,所述固定板上开设有安装孔。
14、本实用新型在一较佳示例中可以进一步配置为:所述姿态演示装置包括第三底板、四个立杆、支撑管、四个电机控制器以及安装座,四个所述电机控制器固定在所述第三底板上,四个所述立杆垂直固定在所述第三底板上且分别分布于靠近所述第三底板的四个边沿上;
15、所述支撑管垂直固定在所述第三底板上且位于四个所述立杆的中心处,多旋翼无人机的旋翼通过所述安装座固定在所述支撑管的顶端,所述支撑管的外壁上固定有滑套,每个所述立杆上分别设置有调节环,每个所述调节环与所述滑套之间均连接有复位弹簧,所述电机控制器通过电线与所述旋翼的电机电连接。
16、综上所述,本实用新型包括以下至少一种有益技术效果:
17、本申请公开了一种无人机控制原理演示教具,其通过设置升力演示装置、反扭演示装置以及姿态演示装置,能够清晰的演示旋翼无人机与直升机的飞行姿态,并能够直接的说明原理。改申请完成了无人机控制原理演示教具从无到有的过程,让无人机的飞行控制原理的科普更为直观和有趣,并能够直接的说明无人机的飞行原理,从而提高了学生对于无人机的学习兴趣与积极性。
技术特征:
1.无人机控制原理演示教具,其特征在于,包括升力演示装置(1)、反扭演示装置以及姿态演示装置(2);
2.根据权利要求1所述的无人机控制原理演示教具,其特征在于,所述固定杆(13)的两端分别设置有滑动环(17),所述滑动环(17)上开设有与所述立柱(12)过渡配合的通孔。
3.根据权利要求1所述的无人机控制原理演示教具,其特征在于,所述直升机反扭矩演示仪(3)包括第二底板(31)、旋翼控制器(32)、支撑座(33)、支撑杆(34)以及导电滑环(35),直升机通过所述导电滑环(35)安装在所述支撑杆(34)的顶端,所述支撑杆(34)的另一端通过所述支撑座(33)垂直固定在所述第二底板(31)上,所述旋翼控制器(32)安装在所述第二底板(31)上,所述旋翼控制器(32)通过电线与所述直升机控制连接。
4.根据权利要求3所述的无人机控制原理演示教具,其特征在于,所述多旋翼反扭矩演示仪(4)与所述直升机反扭矩演示仪(3)的结构相同,多旋翼无人机的多旋翼安装在支撑杆(34)上。
5.根据权利要求3所述的无人机控制原理演示教具,其特征在于,所述支撑座(33)呈花瓣状,所述支撑座(33)的四周固定连接有固定板(331),所述固定板(331)上开设有安装孔(332)。
技术总结
本技术涉及无人机控制原理演示教具,包括升力演示装置、反扭演示装置以及姿态演示装置;所述升力演示装置用于演示及探究无人机旋翼的工作原理;所述反扭演示装置用于演示及探究无人机控制自旋的工作原理;所述姿态演示装置用于演示及探究无人机各轴状态对姿态的整体控制原理。其能够清晰的演示无人机的飞行姿态,并能够直接的说明无人机的飞行原理,从而提高了学生对于无人机的学习兴趣与积极性。
技术研发人员:华勇,姚思聪,马鸣锋
受保护的技术使用者:上海遥程信息科技有限公司
技术研发日:20221226
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!