用于对影响混合推进系统的一个动力系统的故障进行处理的训练方法与流程
本发明涉及一种用于辅助训练飞行器驾驶员处理故障的方法,该故障影响装备有冗余混合推进系统的飞行器的一组至少两个冗余并联动力系统中的动力系统。本发明适用于固定翼飞行器或旋转翼飞行器(直升机)或垂直起降飞行器(vtol,表示vertical take-off and landing aircraft)的推进和升力系统。
背景技术:
1、模拟影响引擎(发动机)的故障以训练双引擎(或三引擎)直升机飞行员的技术已问世多年。
2、模拟影响多引擎直升机的发动机的故障的原理是已知的,包括将两个(或两个以上)引擎的功率降低到与一个单一引擎(或在影响其中一个引擎的故障之后仍然可用的引擎)能够提供的紧急最大功率的水平(所谓的oei/2模拟方法,表示“一台发动机失效(oneengine inoperative)”)。
3、从文献[1]中已知一种用于使飞行器驾驶员解决影响飞行中的多引擎飞行器的一个或多个引擎的故障的方法。软件使用由软件施加在模拟为故障的引擎上的输出功率限制,来模拟引擎故障。例如,在两个引擎的情况下,通过以下方式在两个引擎之间产生不平衡:在发生影响另一引擎的故障并且模拟为有缺陷的另一引擎为旋翼(rotor)提供补充(所谓的显著较低的水平)的情况下,使模拟为运行的引擎达到其连续最大功率(或oeic功率,表示“一台发动机连续失效(one engine inoperative continuous)”功率)。
4、从文献[2]中已知一种用于模拟多引擎飞行器中故障引擎的状况(oei方法)的方法和系统,其涉及引擎在非零功率设置以上的运行,并且每个发动机相对于彼此运行,以模拟在影响至少一个引擎的实际故障期间经历的功率损失。更具体地,通过瞬态地将两个引擎提供的功率限制在它们的紧急最大功率以下来模拟当真正的引擎故障发生时飞行员经历的瞬态功率缺失(trou de puissance transitoire)。
5、混合动力装置管理架构和方法也是已知的,包括一个或多个主引擎和一个或多个辅引擎,旨在能够补偿至少一个主引擎的功率损失。文献[3]和[4]涉及这些解决方案。
6、在混合推进系统的情况下,用于处理影响引擎的故障的训练的简单且众所周知的解决方案是将同一引擎设置为怠速,使得它几乎不向旋翼提供动力。然后,飞行员就可以在只有一个(或多个)剩余动力系统可用的情况下接受飞行训练,该(或这些)动力系统可以仅通过性质不同于模拟为故障的引擎(例如,一个(或多个)电动机)的一个(或多个)辅引擎来实现。
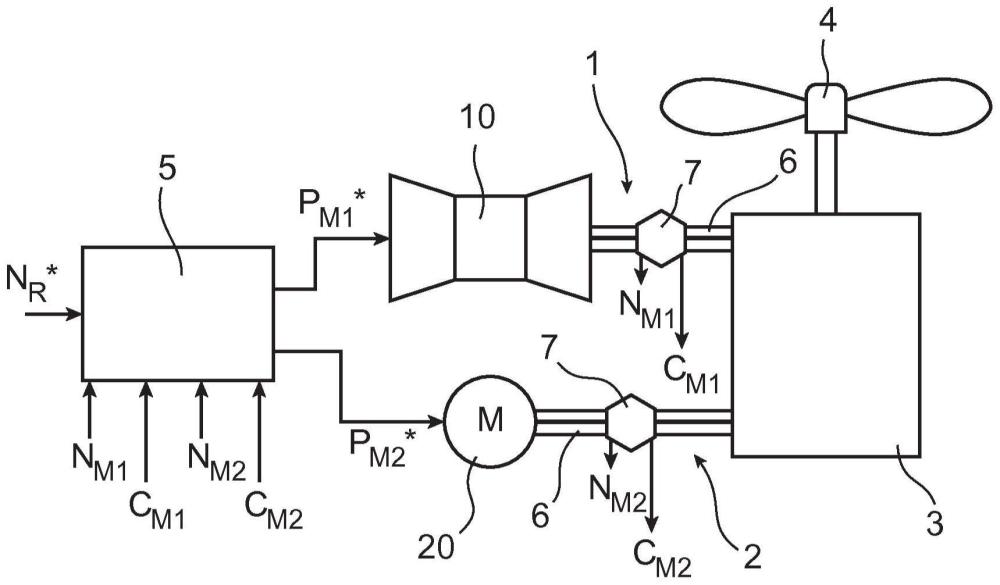
7、飞行器及其混合推进系统的代表性但非限制性示例可以包括配备有主旋翼和尾旋翼(称为反扭矩旋翼)的直升机。
8、直升机配备有主动力系统,该主动力系统具有主引擎通过主传动单元(btp)向两个旋翼提供机械动力。例如,该主引擎可以是直升机涡轮轴发动机;该主引擎提供直升机飞行所需的大部分动力。
9、直升机还配备了电动辅动力系统,包括:
10、-电动机,通过btp上的第二输入向两个旋翼提供机械动力;
11、-动力和控制电子设备,可调节电动机提供的动力;
12、-配电构件;以及
13、-电力源,可以是电池。
14、这种辅动力系统基本上是为了提供最小的动力水平,以确保飞行器安全而快速地着陆。因此,电动机可用的最大功率明显低于主引擎提供的功率。因此,飞行范围和允许的机动性非常有限。
15、在故障影响飞行器的至少一个推进引擎的情况下,特别是具有旋转翼的情况下,可用的最大功率低于正常运行条件下(无故障)可用的功率。驾驶飞行器变得更加复杂,需要飞行员专门学习和训练。通常来说,这些训练包括“模拟”飞行中影响引擎的故障,并要求飞行员在这些下降的条件下驾驶飞行器和着陆。
16、技术的发展使得能够引入混合推进系统,集成不同于一个(或多个)主引擎的一个或多个动力系统。特别是电动或液压动力系统。
17、这些动力系统的性质与一个(或多个)主引擎不同,其尺寸可以设计成能够提供相当于或明显低于一个(或多个)主引擎的最大功率;它们的基本功能可以是在主引擎发生故障时提供紧急“备用”功率。
18、这些混合动力系统的特殊性(相比于安装几个相同的引擎)在于最大功率机制和功率的动态变化可能与主引擎非常不同。因此,在实际故障或故障训练情况下,控制人机工程学可能会受到很大影响。因此,这些训练应该忠实于这些行为差异,以便代表实际的故障情况。
19、最后,上述用于处理引擎故障(即,将引擎设置为怠速时被视为故障)的训练技术的主要缺点是,在训练期间影响剩余动力系统中的一个动力系统的实际故障的情况下,怠速引擎的重新激活和通电时间非常长。因此,在影响动力系统的故障发生后的几秒钟内,飞行的安全性可能会大大降低。
20、涡轮轴发动机制造商开发了所谓的“caa”(表示“民航局(civil aviationauthority)”)训练来解决安全问题,但有时会损害代表性。由于两个引擎的功率都被限制在oei/2,这种训练模式也被称为oei/2。
21、综上所述,本发明旨在提供以下问题的解决方案:
22、-允许训练飞行员在有故障的引擎的情况下飞行(即当模拟影响推进链或升力链的一个元件的故障时);
23、-通过维持模拟为在运行机制下受到故障影响的引擎,使其在实际故障影响模拟为运行的动力系统时具有足够的反应能力,来确保高水平的安全性(特别地,需要能够在训练期间处理影响动力系统的任何实际故障,而不会对飞行器造成任何危险,这涉及到在实际故障后仍在运行的动力系统的元件的良好反应能力);
24、-在装备有混合推进系统的飞行器上,该混合推进系统包括n个并联动力系统(n为大于或等于2的整数),该n个并联动力系统包括本质上不同的至少一个第一动力系统和一个第二动力系统,第一动力系统和第二动力系统优选地具有非常不同的功率和/或动态性能;事实上,通过模拟相当于第一动力系统的最大功率的功率量的损失,所有n个链将被用于模拟影响第一链的故障;例如,对于第一动力系统和第二动力系统的数量级,就功率而言,第二动力系统的最大功率水平可能比第一动力系统的最大功率水平低至少30%,并且就动态性而言,第二动力系统的动态性至少是第一动力系统的两倍;
25、-不过度加载保持活动状态的一个(或多个)动力系统的每个元件。
技术实现思路
1、为此,本发明的目的是一种用于训练飞行员处理影响飞行器的混合推进系统的动力系统的故障的方法,所述飞行器包括在传输单元上并联连接的n个动力系统,n是大于或等于2的整数,所述n个动力系统包括本质上不同的第一动力系统和第二动力系统,所述方法包括在飞机的飞行期间,通过实施以下步骤来模拟影响所述第一动力系统的故障:
2、-将由所述第一动力系统提供的瞬时功率pm1inst降低到训练功率pm1ecol,并保持所述功率pm1ecol直到所述模拟结束,其中:
3、pm2最大_oei>pm1ecol>pm1最小
4、pm2最大_oei为所述第二动力系统在不处于训练模式时能够提供的瞬时最大功率,以及pm1最小为所述第一动力系统能够提供的瞬时最小功率;以及
5、-将由所述第二动力系统提供的瞬时功率pm2inst增加至低于或等于在所述训练模式期间适用于所述第二动力系统的上限功率pm2lim_ecol的功率,以及在所述模拟过程中调节所述功率pm2inst,使得在所述训练模式中通过所述第一动力系统和所述第二动力系统提供的瞬时总功率ptot_ecol小于或等于pm2最大_oei,其中:
6、ptot_ecol=pm1ecol+pm2inst
7、ptot_ecol≤pm2最大_oei
8、pm2inst≤pm2lim_ecol<pm2最大_oei
9、pm2lim_ecol+pm1ecol=pm2最大_oei
10、pm2lim_ecol是所述第二动力系统在所述训练模式中使得ptot_ecol不超过pm2最大_oei所能够提供的最大功率;
11、所述方法还包括:在执行所述模拟的同时,检查所述推进系统的所述n个动力系统的状态,以及如果检测到影响所述n个动力系统中的一个动力系统的故障,则停止所述模拟并增加由所述第一动力系统和所述第二动力系统中的至少一个提供的瞬时功率,使得通过所述n个动力系统提供的瞬时功率之和大于或等于pr最小_oei,pr最小_oei是所述飞行器持续飞行所需的最小总瞬时功率。
12、更具体地,pr最小_oei是在令人满意的安全条件下持续飞行所需的最小功率;该功率仅取决于飞行器的特性,与处于训练模式、正常飞行或故障情况无关。例如,在双引擎直升机上,这通常对应于oei30”(或sep,表示“超级应急功率(super-emergency power)”),在单引擎直升机上,在90% mtop(maximum take-off power,表示“最大起飞功率”)。
13、为了清楚地区分在训练模式中(即在模拟期间)应用的限制和在不在训练模式中时(例如在真实故障情况下)存在的限制,还分别添加了索引“_ecol”和“_oei”(例如,在训练模式期间pm2lim和pm2最小写为pm2lim_ecol和pm2最小_ecol,以及当不在训练模式下时pm2最大写为pm2最大_oei)。
14、此外,需要指出的是,pm2最大_oei和pm2最大完全相同,两者都是指第二动力系统在实际故障情况下(即不处于训练模式时)可以提供的最大功率。
15、此外,需要指出的是,在本发明的上下文中,对训练或训练模式的说法是不加区分的。
16、该方法的某些优选的但非限制性的方面如下:
17、有利的是,所述第二动力系统选自液压型动力系统或电动型动力系统,以及所述第一动力系统选自燃气轮机型动力系统。
18、根据本发明的变型,其中,所述第二动力系统是可逆的,在增加通过所述第二动力系统提供的所述瞬时功率pm2inst的步骤之前,可以先进行以下步骤:通过所述第二动力系统将由所述第一动力系统提供的瞬时功率pm1的一部分汲取到所述传动单元,从而获得在所述模拟期间由所述第一动力系统和所述第二动力系统提供的瞬时总功率ptot_ecol的更快下降。
19、根据一个变型,减少由所述第一动力系统提供的所述瞬时功率pm1inst的步骤包括:将所述第一动力系统的功率瞬态降低到pm1ecol以下,随后将所述第一动力系统的功率增加到pm1ecol。
20、根据一个变型,触发增加由所述第二动力系统提供的所述瞬时功率pm2inst的步骤被延迟和/或由所述第二动力系统提供的所述瞬时功率pm2inst的增加被减慢,从而产生瞬态功率缺失。
21、根据一个变型,所述第二动力系统是可逆的,以及pm1ecol被选择为高于或等于pr最小_ecol(pr最小_ecol是所述飞行器在训练模式下持续飞行所需的最小总瞬时功率),在增加由所述第二动力系统提供的功率的步骤期间,通过所述第二动力系统至少执行一次将由所述第一动力系统提供的功率的一部分汲取到传动单元的步骤,能够汲取的最大部分pm2最小_ecol是负值,且在绝对值上等于所述第二动力系统在所述训练模式下能够从所述传动单元汲取的最大功率,其中,pm1ecol+pm2最小_ecol≤pr最小_ecol。选择pm1ecol≥pr最小_ecol使得在故障训练阶段(训练)期间最大化第一动力系统的功率,以便在该训练阶段期间发生影响(n-1)个其他动力系统中的一个的真实故障的情况下,能够提供第一动力系统的最大响应以返回到其最大功率;换言之,约束条件可概括如下:
22、-为了符合最低功率:
23、pm1ecol+pm2最小_ecol=pr最小_ecol
24、其中,pm2最小_ecol是在训练模式下第二动力系统所能汲取的最大功率(绝对值)(已知pm2最小_ecol可以是负数);以及
25、-为了符合最大功率:
26、pm1ecol+pm2lim_ecol=pm2最大_oei
27、其中,pm2lim_ecol是第二动力系统在训练模式中使得ptot_ecol不超过pm2最大_oei所能够提供的最大功率。
28、根据一个变型,在所述模拟期间实时调整所述第一动力系统的功率pm1ecol和所述第二动力系统的功率极限pm2lim_ecol,使得在所述模拟期间所述第二动力系统的功率的平均值等于为保证驾驶所述飞行器的余量而选择的参考功率pm2réf,其中,pm2最小<pm2réf<pm2lim_ecol且pm2lim_ecol(t)+pm1ecol(t)=pm2最大_oei。
29、本发明的另一个目的是在影响飞行器混合推进系统的动力系统的故障下用于训练飞行员的装置,所述混合推进系统包括n个动力系统,n是大于或等于2的整数,所述n个动力系统包括本质上不同且在传动单元上并联连接的第一动力系统和第二动力系统,所述装置包括被配置为实现根据本发明定义的训练方法的控制装置。
30、控制装置可以包括:调节系统,该调解系统将调节第一动力系统和第二动力系统的相应功率,以及控制系统,该控制系统将控制n个动力系统的相应功率。
31、最后,本发明的目的是一种飞行器,配备有混合推进系统以及根据本发明定义的训练装置,混合推进器系统包括n个动力系统,n是大于或等于2的整数,所述n个动力系统包括本质上不同且在传动单元上并联连接的第一动力系统和第二动力系统。
32、根据本发明的方法使得能够在模拟影响动力系统中的一个动力系统的故障的降级条件下对飞行员进行飞行训练。
33、根据本发明的方法使得能够以巧妙的方式分配由至少两个动力系统提供的功率,使得:
34、-在模拟过程中,将提供给两个动力系统的总功率限制在被认为可正常工作的动力系统的最大功率之内;
35、-将模拟为故障的动力系统保持在足够的运行机制,使其保持反应性,同时使其对飞行员“透明”;
36、-提供行为和变化动态性,以使得提供给飞行器的功率与被视为可运行的动力系统完全对应;
37、-在训练期间检测到影响被认为可运行的动力系统的故障发生时,中断训练操作,并非常迅速地重新启动模拟为有故障的动力系统,使其提供在令人满意的安全条件下持续飞行所需的动力。
- 还没有人留言评论。精彩留言会获得点赞!