基于人工智能的智能车辅助教学方法、装置、介质及设备与流程
本技术涉及人工智能领域,具体涉及一种基于人工智能的智能车辅助教学方法、装置、介质及设备。
背景技术:
1、随着半导体在汽车中的应用日益普及,汽车电子应用已涵盖了从汽车电子控制装置到车载汽车电子装置的所有系统,汽车的电子化已成为行业发展的必然趋势,在这样的行业背景下,为了培养面向未来的科技尖端人才,智能车教学成为了院校培养人才的重要实验课程之一。
2、智能车是电子计算机等最新科技成果与现代汽车工业相结合的产物,现有的智能车教学通常是学生通过反复调试智能车程序,使得智能车能够自动变速、自动识别道路,以自动驾驶通过各种赛道元素。但在实际的实验教学过程中,由于智能车的理论实践知识难度大、实验偶然性强,且智能车的运行速度较快,当智能车实验失败时,学生无法及时发现故障原因,从而无法根据故障原因进行调试,进而导致智能车的调试效率过低。
技术实现思路
1、本技术提供一种基于人工智能的智能车辅助教学方法、装置、介质及设备,可以提高智能车的调试效率。
2、在本技术的第一方面提供了一种基于人工智能的智能车辅助教学方法,包括:
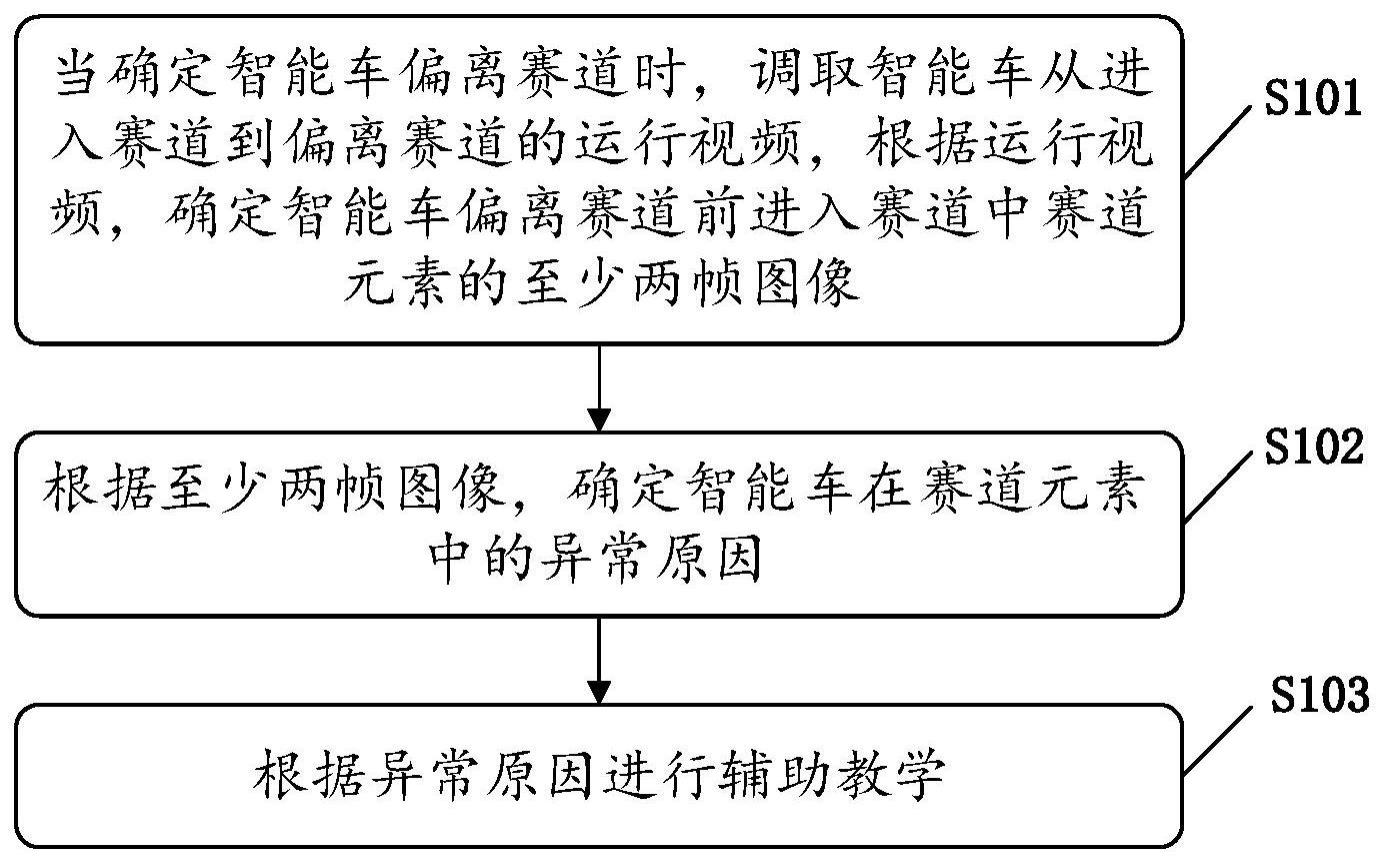
3、当确定智能车偏离赛道时,调取所述智能车从进入所述赛道到偏离所述赛道的运行视频,根据所述运行视频,确定所述智能车偏离所述赛道前进入所述赛道中赛道元素的至少两帧图像;
4、根据所述至少两帧图像,确定所述智能车在所述赛道元素中的异常原因;
5、根据所述异常原因进行辅助教学。
6、通过上述技术方案,调取智能车偏离赛道前的视频信息,并确定智能车偏离赛道前进入赛道中赛道元素的两帧以上图像,根据图像确定智能车在该赛道元素中的异常原因,从而根据异常原因进行辅助教学,使得学生可以及时发现故障原因,并根据故障原因进行调试,进而提高智能车的调试效率。
7、可选的,所述赛道元素包括弯道元素、环岛元素、横断元素以及岔路元素,所述根据所述至少两帧图像,确定所述智能车在所述赛道元素中的异常原因,包括:
8、在确定所述智能车进入所述弯道元素、所述环岛元素、所述横断元素以及所述岔路元素中的任意一种之前,根据所述至少两帧图像,计算所述智能车的第一运行速度;
9、若所述第一运行速度超过第一速度阈值,则确定所述智能车在所述赛道元素中出现超速异常。
10、通过采用上述技术方案,当智能车进入弯道元素、环岛元素、横断元素以及岔路元素时,需要做减速处理,因此由于超速造成的智能车偏离赛道的可能性较大,通过两帧以上的图像分析智能车的运行速度,进而确定智能车是否出现超速异常。
11、可选的,所述根据所述至少两帧图像,确定所述智能车在所述赛道元素中的异常原因,包括:
12、当确定所述智能车进入所述弯道元素、所述环岛元素、所述横断元素以及所述岔路元素中的任意一种之前,根据所述至少两帧图像,确定所述智能车的偏转方向;
13、若所述偏转方向与预设预设偏转方向不同,则确定所述智能车在所述赛道元素中出现方向异常。
14、通过采用上述技术方案,当智能车进入弯道元素、环岛元素、横断元素以及岔路元素之前,需要通过智能车上设置的摄像头进行图像识别,进而确定偏转方向,由于偏转方向错误造成的智能车偏离赛道的可能性较大,通过两帧以上的图像分析智能车的运行速度,进而确定智能车是否出现方向异常。
15、可选的,所述根据所述至少两帧图像,确定所述智能车在所述赛道元素中的异常原因,包括:
16、当确定所述智能车进入所述弯道元素、所述环岛元素、所述横断元素以及所述岔路元素中的任意一种之后,根据所述至少两帧图像,计算所述智能车的第二运行速度;
17、若所述第二运行速度与预设速度的偏差大于速度阈值,则确定所述智能车在所述赛道元素中出现速度异常。
18、通过采用上述技术方案,当智能车进入弯道元素、环岛元素、横断元素以及岔路元素之后,需要进行pid控制速度,进而确定转弯时的速度,因此由于速度错误造成智能车偏离赛道的可能性较大,通过两帧以上的图像分析智能车的运行速度与预设速度的偏差,进而确定智能车是否出现速度异常。
19、可选的,所述赛道元素包括弯道元素和环岛元素,所述根据所述至少两帧图像,确定所述智能车在所述赛道元素中的异常原因,包括:
20、当确定所述智能车进入所述弯道元素或环岛元素之前,根据所述至少两帧图像,计算所述智能车的偏转角度;
21、若所述偏转角度与预设角度的偏差大于角度阈值,则确定所述智能车在所述赛道元素中出现补线异常。
22、通过采用上述技术方案,当智能车进入弯道元素或环岛元素之前,需要通过设置在智能车上的摄像头识别赛道,对赛道进行补线操作,从而计算拟合中线,根据拟合中线控制智能车舵机的偏转角度,因此由于偏转角度造成智能车偏离赛道的可能性较大,通过两帧以上的图像分析智能车的偏转角度,进而确定智能车是否出现补线异常。
23、可选的,所述赛道元素包括横断元素,所述根据所述至少两帧图像,确定所述智能车在所述赛道元素中的异常原因,包括:
24、当确定所述智能车进入所述横断元素时,根据所述至少两帧图像,计算所述智能车在转弯时距离横断障碍物的第一距离,以及回到赛道后距离横断障碍物的第二距离;
25、若所述第一距离或所述第二距离超过距离阈值,则确定所述智能车在所述赛道元素中出现转弯异常。
26、通过采用上述技术方案,当智能车进入横断元素时,需要在距离横断障碍物一侧的一段距离之前转弯,以及横断障碍物另一侧的一段距离之后回到赛道,因此由于转弯造成智能车偏离赛道的可能性较大,通过两帧以上的图像分析智能车与横断障碍物之间的距离,进而确定智能车是否出现转弯异常。
27、可选的,所述赛道元素包括十字元素,所述根据所述至少两帧图像,确定所述智能车在所述赛道元素中的异常原因,包括:
28、当确定所述智能车进入所述十字元素时,根据所述至少两帧图像,判断所述智能车是否出现偏转现象;
29、若所述智能车出现偏转现象,则确定所述智能车在所述赛道元素中出现特征点识别异常。
30、通过采用上述技术方案,当智能车进入十字元素时,需要直接通过十字元素,由于智能车可能将十字元素中的特征点误判为弯道元素而转弯偏离赛道,因此,通过两帧以上的图像分析智能车是否出现偏转现象,进而确定智能车是否出现特征点异常。
31、在本技术的第二方面提供了一种基于人工智能的智能车辅助教学装置,所述装置包括:
32、图像捕捉模块,用于当确定智能车偏离赛道时,调取所述智能车从进入所述赛道到偏离所述赛道的运行视频,根据所述运行视频,确定所述智能车偏离所述赛道前进入所述赛道中赛道元素的至少两帧图像;
33、异常原因确定模块,用于根据所述至少两帧图像,确定所述智能车在所述赛道元素中的异常原因;
34、辅助教学生成模块,用于根据所述异常原因进行辅助教学。
35、在本技术的第三方面提供了一种计算机可读存储介质,所述计算机存储介质存储有多条指令,所述指令适于由处理器加载并执行上述的方法步骤。
36、在本技术的第四方面提供了一种电子设备,包括:处理器、存储器;其中,所述存储器存储有计算机程序,所述计算机程序适于由所述处理器加载并执行上述的方法步骤。
37、综上所述,本技术包括以下至少一种有益效果:
38、通过本技术技术方案,调取智能车偏离赛道前的视频信息,并确定智能车偏离赛道前进入赛道中赛道元素的两帧以上图像,根据图像确定智能车在该赛道元素中的异常原因,从而根据异常原因进行辅助教学,使得学生可以及时发现故障原因,并根据故障原因进行调试,进而提高智能车的调试效率。
- 还没有人留言评论。精彩留言会获得点赞!