一种空间机械臂扰动模拟装置的制作方法
本发明属于模拟空间飞行器对所搭乘机械臂产生扰动的地面工装设备,尤其涉及一种空间机械臂扰动模拟装置。
背景技术:
1、搭载在空间飞行器上的机械臂在轨工作工程中不可避免地会受到来自外界的扰动,包含:飞行器调姿、轨道机动、太阳帆板展收、力矩陀螺仪旋转等。这种扰动将直接影响机械臂的工作性能,如影响空间机械臂抓捕动作能否顺利实施、捕获后组合体能否平稳转运,除此之外还会影响手眼相机的图像质量及分辨率等。考虑到空间机械臂的研发成本和发射成本都非常昂贵,因此在进入太空之前,需要开展扰动工况下的地面实验验证和测试。如何真实有效地对产生的扰动进行模拟是亟需研究和解决的关键问题。
2、目前针对有效载荷扰动的模拟方法主要有两种:
3、一种是将扰动源的数据进行特征提取和数学建模,之后将所建立的数学模型作为模拟的输入,通过仿真分析的方法研究扰动对载荷工作的影响,这种模拟方法存在过程复杂、通用性、真实性差、准确性难以保证的缺点。
4、另一种方法是以飞行模拟器为代表的多自由度运动平台,其中的六自由度运动平台可以将载荷运动到任意位置任意姿态实现对扰动的模拟,其工作原理如图1所示。空间机械臂受到关节性能局限,无法克服地面重力的影响,无法在地面完成在轨轨迹的遍历,需要借助气浮或悬丝技术开展地面试验。此时以飞行模拟器为代表装置便不能满足试验需求,无法很好的模拟扰动对空间机械臂在轨工作的影响。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供了一种空间机械臂扰动模拟装置,能够简单有效地模拟机械臂受到的扰动,有力的支撑了地面试验。
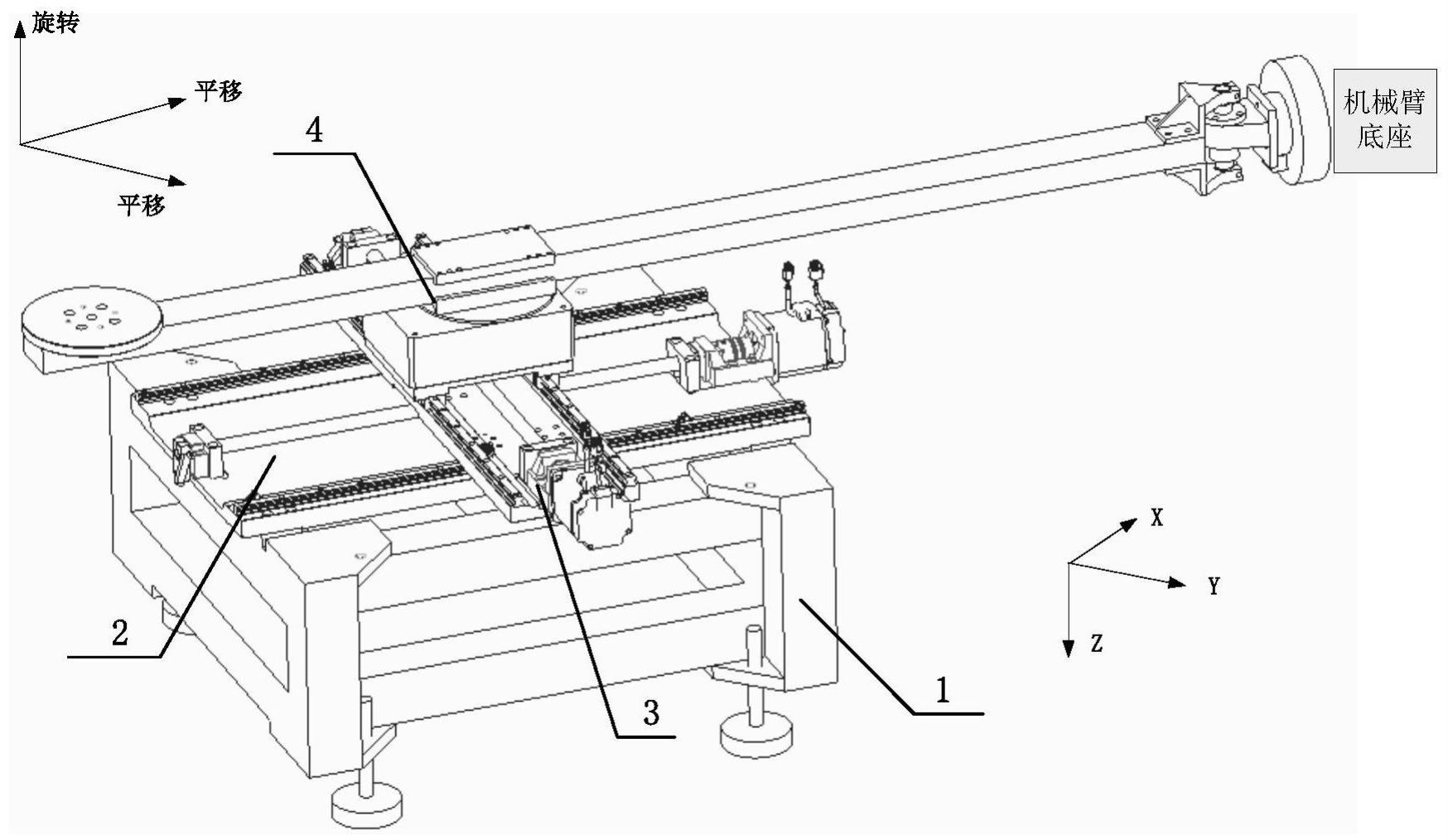
2、本发明目的通过以下技术方案予以实现:一种空间机械臂扰动模拟装置,包括:基座、x移动单元、y移动单元和z旋转单元;其中,所述x移动单元与所述基座相连接;所述y移动单元与所述x移动单元相连接,所述y移动单元能够沿着x方向进行平移;所述z旋转单元与所述y移动单元相连接,所述z旋转单元能够沿着y方向进行平移;所述z旋转单元具有沿z方向的旋转能力。
3、上述空间机械臂扰动模拟装置中,所述x移动单元包括第一基板、第一伺服电机、第一编码器、第一联轴器、第一滚珠丝杠、第一丝母、第一简支梁导轨、第一滑块、第一限位开关、第一零位开关和第一感应片;其中,所述第一基板与所述基座相连接;所述第一伺服电机通过所述第一联轴器与所述第一滚珠丝杠相连接;所述第一丝母与所述第一滚珠丝杠螺纹连接;所述第一编码器安装在所述第一伺服电机的一侧,所述第一编码器用于记录第一伺服电机的转动圈数;所述第一简支梁导轨安装在所述第一基板上;所述第一滑块设置于所述第一简支梁导轨上;所述第一限位开关有两个,两个第一限位开关固定在第一基板上,两个第一限位开关沿x方向一前一后布置;所述第一零位开关固定在第一基板上,所述第一零位开关位于两个第一限位开关的中间位置;所述第一感应片固定在y移动单元的第二基板上,所述第一感应片能够随着第二基板沿x方向运动。
4、上述空间机械臂扰动模拟装置中,所述y移动单元包括第二基板、第二伺服电机、第二编码器、第二联轴器、第二滚珠丝杠、第二丝母、第二简支梁导轨、第二滑块、第二限位开关、第二零位开关和第二感应片;其中,所述第二基板均与所述第一丝母和所述第一滑块相连接;所述第二伺服电机通过所述第二联轴器与所述第二滚珠丝杠相连接;所述第二丝母与所述第二滚珠丝杠螺纹连接;所述第二编码器安装在所述第二伺服电机的一侧,所述第二编码器用于记录第二伺服电机的转动圈数;所述第二简支梁导轨安装在所述第二基板上;所述第二滑块设置于所述第二简支梁导轨上;所述第二限位开关有两个,两个第二限位开关固定在第二基板上,两个第二限位开关沿y方向一前一后布置;所述第二零位开关固定在第二基板上,所述第二零位开关位于两个第二限位开关的中间位置;所述第二感应片固定在z旋转单元的第二基座上,所述第二感应片能够随着第二基座沿y方向运动。
5、上述空间机械臂扰动模拟装置中,所述z旋转单元包括第三伺服电机、第三编码器、第三联轴器、第二基座、传动机构、转台、配重装置、长杆、铰链和传感器;其中,所述第二基座与所述y移动单元相连接;所述传动机构设置于所述第二基座的上部;所述第三伺服电机通过所述第三联轴器与所述传动机构相连接,所述第三伺服电机带动所述传动机构沿z方向的转动;所述转台与所述传动机构相连接,所述传动机构带动所述转台相对于所述第二基座转动;所述长杆与所述转台相连接;所述配重装置设置于所述长杆的一端;所述长杆的另一端通过所述铰链与所述机械臂底座相连接;所述传感器设置于所述铰链上。
6、上述空间机械臂扰动模拟装置中,所述第二伺服电机的最大推力通过如下公式得到:
7、fmax=m·amaxy+m·wy·vmaxy+m·l·αmaxz+2m·wy×v′y;
8、其中,fmax为第二伺服电机的最大推力,m为机械臂质量,amaxy为y方向的最大运动加速度,αmaxz为沿着z方向的最大转动加速度,l为质心偏移量,wy为沿y方向的角频率,vmaxy为沿y方向的最大速度,v′y为沿y方向的实时加速度。
9、上述空间机械臂扰动模拟装置中,所述转台的最大转矩通过如下公式得到:
10、m=j·αmaxz+m·axy·l;
11、其中,m为转台的最大转矩,m为机械臂质量,l为质心偏移量,αmaxz为z方向的最大运动加速度,αxy为平面运动的加速度,j为整套扰动装置的z旋转单元在z方向上的转动惯量。
12、上述空间机械臂扰动模拟装置中,所述传动机构采用锥齿轮的方式将沿电机的运动转换为沿z方向的转动。
13、上述空间机械臂扰动模拟装置中,所述第一基板的长度方向与所述第二基板的长度方向相互垂直。
14、上述空间机械臂扰动模拟装置中,所述基座的每个底角设置有支撑座。
15、上述空间机械臂扰动模拟装置中,所述第一简支梁导轨的数量为两个,两个第一简支梁导轨并行排列。
16、本发明与现有技术相比具有如下有益效果:
17、(1)本发明采用电机加丝杠丝母驱动、滑块导向的方法,克服了传统的多自由度飞行模拟平台无法实现在气浮平台上的扰动模拟,可以有效地模拟飞行器对空间机械臂等空间结构在微重力条件下的扰动模拟;
18、(2)本发明采用了串联叠加的分布方式,将y移动单元放置在x移动单元上,将z旋转单元防止在y移动单元上,最大限度地减少了装置的电气组件数目,避免了并联构型存在的不对称、不协调、相互较劲的问题,保证了整套装置的平稳可靠;
19、(3)本发明装置末端连接空间机械臂底座的部位采用了铰链式的连接方式,保证了机械臂底座在竖直方向上具备一定的调节余量,有效解决了装置与底座高度不一致带来的干扰力,提高了扰动模拟的精度;
20、(4)本发明设计了长杆一端的配重装置,通过配重可以实现整套装置与机械臂整体的质心落在z旋转轴上,减少因质心偏移引起的干扰力,提高扰动模拟的精度。
技术特征:
1.一种空间机械臂扰动模拟装置,其特征在于包括:基座(1)、x移动单元(2)、y移动单元(3)和z旋转单元(4);其中,
2.根据权利要求1所述的空间机械臂扰动模拟装置,其特征在于:所述x移动单元(2)包括第一基板(312)、第一伺服电机(322)、第一编码器(332)、第一联轴器(342)、第一滚珠丝杠(352)、第一丝母(362)、第一简支梁导轨(372)、第一滑块(382)、第一限位开关(392)、第一零位开关(3102)和第一感应片(3112);其中,
3.根据权利要求2所述的空间机械臂扰动模拟装置,其特征在于:所述y移动单元(3)包括第二基板(31)、第二伺服电机(32)、第二编码器(33)、第二联轴器(34)、第二滚珠丝杠(35)、第二丝母(36)、第二简支梁导轨(37)、第二滑块(38)、第二限位开关(39)、第二零位开关(310)和第二感应片(311);其中,
4.根据权利要求1所述的空间机械臂扰动模拟装置,其特征在于:所述z旋转单元(4)包括第三伺服电机(41)、第三编码器(42)、第三联轴器(43)、第二基座(44)、传动机构(45)、转台(46)、配重装置(47)、长杆(48)、铰链(49)和传感器(410);其中,
5.根据权利要求3所述的空间机械臂扰动模拟装置,其特征在于:所述第二伺服电机(32)的最大推力通过如下公式得到:
6.根据权利要求4所述的空间机械臂扰动模拟装置,其特征在于:所述转台(46)的最大转矩通过如下公式得到:
7.根据权利要求4所述的空间机械臂扰动模拟装置,其特征在于:所述传动机构(45)采用锥齿轮的方式将沿电机的运动转换为沿z方向的转动。
8.根据权利要求3所述的空间机械臂扰动模拟装置,其特征在于:所述第一基板(312)的长度方向与所述第二基板(31)的长度方向相互垂直。
9.根据权利要求1所述的空间机械臂扰动模拟装置,其特征在于:所述基座(1)的每个底角设置有支撑座。
10.根据权利要求2所述的空间机械臂扰动模拟装置,其特征在于:所述第一简支梁导轨(372)的数量为两个,两个第一简支梁导轨(372)并行排列。
技术总结
本发明公开了一种空间机械臂扰动模拟装置,包括:基座、X移动单元、Y移动单元和Z旋转单元;其中,所述X移动单元与所述基座相连接;所述Y移动单元与所述X移动单元相连接,所述Y移动单元能够沿着X方向进行平移;所述Z旋转单元与所述Y移动单元相连接,所述Z旋转单元能够沿着Y方向进行平移;所述Z旋转单元具有沿Z方向的旋转能力。本发明能够简单有效地模拟机械臂受到的扰动,有力的支撑了地面试验。
技术研发人员:段嘉琪,王燕波,李科,陈志鸿,蔡赫
受保护的技术使用者:北京精密机电控制设备研究所
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!