仿真爬行机器人及其控制方法与流程
本发明涉及仿真机器人相关,具体为仿真爬行机器人及其控制方法。
背景技术:
1、仿真机器人又叫仿生机器人,是指模仿生物、从事生物特点工作的机器人,仿真机器人在各个领域都有着广阔的应用前景,在教育领域仿真机器人可以教育学生各种生物学知识,可以避免课本教学的枯燥乏味,也无需真实接触危险的生物,其中比较有代表性的就是蜘蛛仿真机器人。
2、传统的蜘蛛仿真爬行机器人,如中国专利cn205984082u一种教学用仿真机器蜘蛛,作为教育用机器人,与蜘蛛外观相似度不足,难以让学生联想到蜘蛛本身,且难以模拟出蜘蛛在蛛网上爬行的姿态,难以让学生了解到蜘蛛真实的外观及活动姿态,仿真效果不佳,同时结构复杂,局限性较大。
技术实现思路
1、本发明的目的在于提供仿真爬行机器人及其控制方法,以解决上述背景技术提出的目前传统的蜘蛛仿真爬行机器人仿真效果不佳,使用局限性较大的问题。
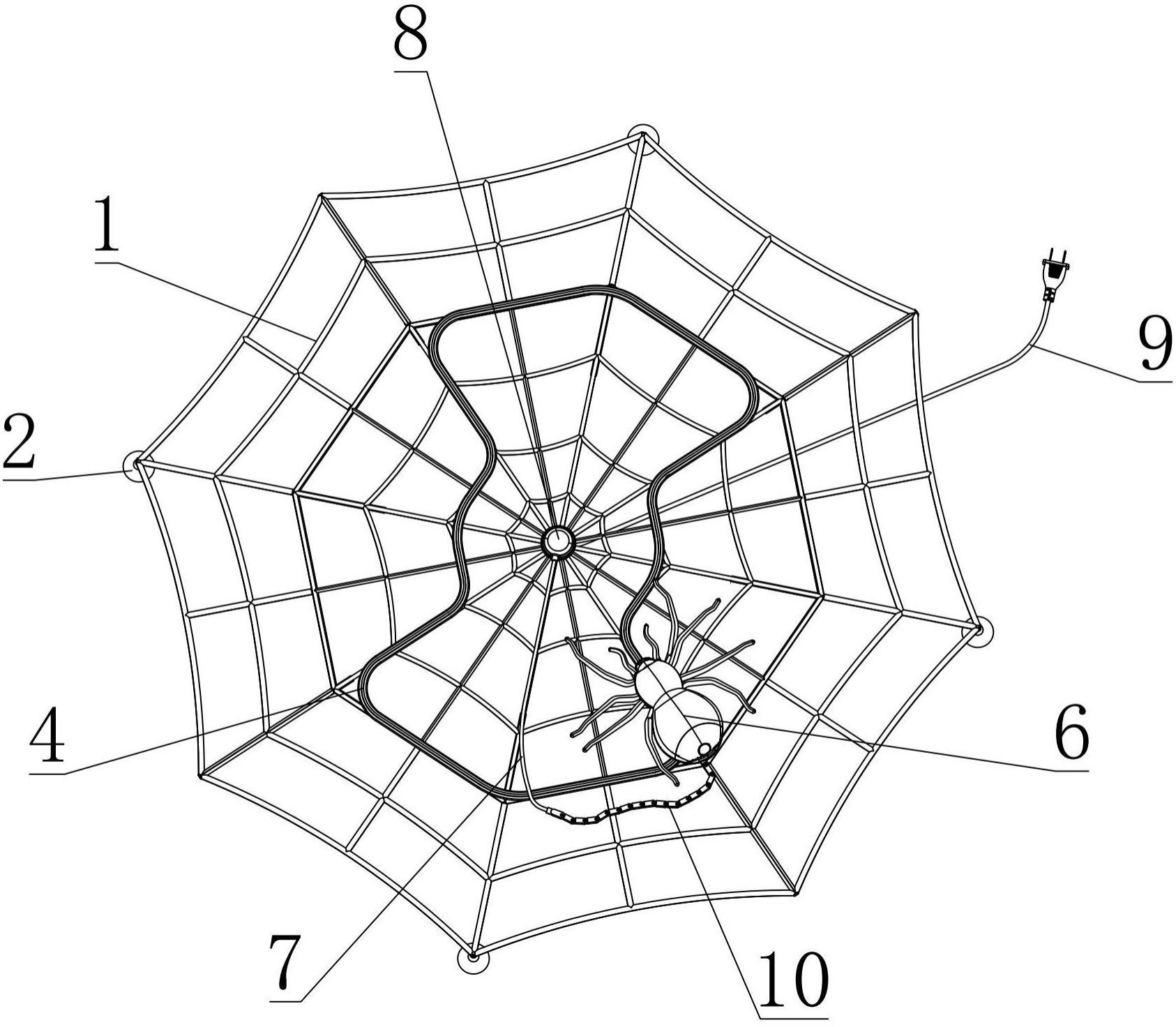
2、为实现上述目的,本发明提供如下技术方案:仿真爬行机器人,包括蛛网支撑架,所述蛛网支撑架上通过轨道固定螺钉固定安装有弧形轨道,所述弧形轨道上通过跨坐轮组活动安装有蜘蛛仿生机器人,所述蜘蛛仿生机器人通过随动接电线与蛛网支撑架中心的旋转接头连接,所述旋转接头下方连接有电源线,所述蜘蛛仿生机器人内设置有齿轮驱动机构来驱动其前进,所述齿轮驱动机构通过齿轮传动连接有蛛腿随动机构,所述蛛腿随动机构通过齿轮传动连接有仿生蛛腿,所述蜘蛛仿生机器人眼睛处设置有两组led灯珠;所述蜘蛛仿生机器人尾部固定连接有链条护套,所述链条护套,所述随动接电线穿过链条护套与旋转接头连接。
3、进一步地,所述蛛网支撑架包括八边形内蛛网和拼接外蛛网,所述八边形内蛛网呈八边形,位于蛛网支撑架中间,所述蛛网支撑架四周设置有四组拼接外蛛网,所述八边形内蛛网四周下方设置有卡和连接块,所述拼接外蛛网上开设有卡和连接槽,所述八边形内蛛网和拼接外蛛网通过卡和连接块和卡和连接槽的配合卡和连接。
4、进一步地,所述拼接外蛛网尖端处卡和连接有固定吸盘。
5、进一步地,所述弧形轨道呈弧形弯曲围绕蛛网支撑架一周,所述弧形轨道的路径贴合蛛网支撑架的蛛网骨架的位置,便于轨道固定螺钉的连接以及美观。
6、进一步地,所述弧形轨道截面呈“十”字形,所述弧形轨道下方一侧加工有轨道弧形齿条。
7、进一步地,所述跨坐轮组包括定位轮支撑架,所述定位轮支撑架两端活动连接有跨坐定位轮,所述跨坐定位轮设置有两组,且两组跨坐定位轮分别位于弧形轨道两侧,两组跨坐定位轮将弧形轨道夹在中间,所述定位轮支撑架后侧设置有对位夹紧轮,所述对位夹紧轮一侧设置有动力齿轮,所述对位夹紧轮和动力齿轮将弧形轨道夹在中间,所述跨坐定位轮、对位夹紧轮和动力齿轮中间部位均设置有与弧形轨道截面形状相配合的卡和槽,避免跨坐轮组脱出弧形轨道。
8、进一步地,所述齿轮驱动机构包括驱动电机,所述蜘蛛仿生机器人内设置有驱动电机,所述驱动电机的输出端通过键槽固定连接有小带轮,所述小带轮通过皮带传动连接有大带轮,所述大带轮下方固定连接有第一齿轮,所述第一齿轮啮合有第二齿轮,所述第二齿轮上方固定连接有第三齿轮,所述第三齿轮啮合有第四齿轮,所述第四齿轮下方固定连接有第五齿轮,所述第五齿轮啮合有第六齿轮,所述第六齿轮下方固定连接有第七齿轮,所述第七齿轮啮合有第八齿轮,所述第八齿轮与动力齿轮固定连接。
9、进一步地,所述蛛腿随动机构包括第九齿轮,所述第一齿轮啮合有第九齿轮,所述第九齿轮啮合有第十齿轮,所述第十齿轮下方固定连接有蜗杆,所述蜗杆传动连接有蜗轮,所述蜗轮一侧通过传动杆固定连接有偏心连杆,所述偏心连杆上通过偏心套筒活动连接有仿生蛛腿;所述偏心套筒和仿生蛛腿共设置有四组,且每一组仿生蛛腿处的偏心连杆依次存在九十度相位差。
10、本发明还公开了一种仿真爬行机器人的控制方法,用于控制所述仿真爬行机器人;所述仿真爬行机器人的控制方法包括有:
11、获取多个爬行速度控制策略对目标仿真爬行机器人的可信爬行速度控制变化数据,并基于所述可信爬行速度控制变化数据生成所述目标仿真爬行机器人的训练依据簇,所述训练依据簇包括各爬行速度控制策略对应的训练依据;
12、将所述目标仿真爬行机器人的速度控制环境配置特征输入初始化模型权重参数的爬行速度控制决策模型,生成所述目标仿真爬行机器人的爬行速度控制决策数据簇,所述爬行速度控制决策数据簇包括各爬行速度控制策略对应的爬行速度控制决策数据;
13、基于所述训练依据簇、所述爬行速度控制决策数据簇以及所述爬行速度控制决策数据簇中的爬行速度控制变化态势,确定所述爬行速度控制决策模型的模型收敛指标;
14、基于所述模型收敛指标对所述爬行速度控制决策模型的权重信息进行更新,生成训练完成的所述爬行速度控制决策模型,训练完成的所述爬行速度控制决策模型用于对任意输入的指定仿真爬行机器人的速度控制环境配置特征进行爬行速度控制决策,并根据爬行速度控制决策结果对所述指定仿真爬行机器人进行爬行速度控制。上述方法由所述仿真爬行机器人中的控制器控制处理完成。
15、进一步地,所述基于所述可信爬行速度控制变化数据生成所述目标仿真爬行机器人的训练依据簇,包括:
16、将所述多个爬行速度控制策略对所述目标仿真爬行机器人的可信爬行速度控制变化数据进行规则化转换,生成规则化转换后的可信爬行速度控制变化数据;
17、基于所述规则化转换后的可信爬行速度控制变化数据生成所述目标仿真爬行机器人的训练依据簇。
18、与现有技术相比,本发明的有益效果是:
19、1.本发明通过蛛网支撑架和弧形轨道的设置,使得蜘蛛仿生机器人可以沿着弧形轨道在蛛网支撑架上爬行,真实模拟蜘蛛的外形及日常活动状态;同时蛛网支撑架可以通过吸盘吸附挂载在黑板上,且蛛网支撑架可以拆卸成为五个部分进行折叠,从而便于存放携带;
20、2.本发明通过蛛腿随动机构和仿生蛛腿的设置,使得驱动电机在驱动蜘蛛仿生机器人沿弧形轨道前进的同时,还可以驱动仿生蛛腿进行爬动的动作,模仿蜘蛛爬行的真实肢体动作,更加逼真,仿真效果更佳,从而解决了上述背景技术提出的目前传统的蜘蛛仿真爬行机器人仿真效果不佳,使用局限性较大的问题。
21、3. 本发明基于爬行速度控制策略对目标仿真爬行机器人的可信爬行速度控制变化数据可以获得高精度的训练依据簇,通过目标仿真爬行机器人的速度控制环境配置特征以及爬行速度控制决策数据簇来完成目标仿真爬行机器人和爬行速度控制策略之间的模型构建关系,并且基于训练依据簇、爬行速度控制决策数据簇和爬行速度控制决策数据簇中的爬行速度控制变化态势来确定爬行速度控制决策模型的模型收敛指标,可以从多个模态使得建立的爬行速度控制决策模型能够更广泛地应用于仿真爬行机器人的可信爬行速度控制,从而提高爬行速度控制决策模型的爬行速度控制决策性能,从而提高仿真爬行机器人的控制效率,进一步解决了上述背景技术提出的目前传统的蜘蛛仿真爬行机器人仿真效果不佳,使用局限性较大的问题。
- 还没有人留言评论。精彩留言会获得点赞!