智能机巡专用杆塔标示牌及其控制方法与流程
本申请涉及电网巡检的,特别是涉及一种智能机巡专用杆塔标示牌及其控制方法。
背景技术:
1、随着无人机技术的发展,配网线路巡检作业也在向自动化、智能化方向发力,目前无人机巡线已大规模进入应用领域。现阶段,无人机能够在险要、复杂地形下安全、高效地执行巡视任务,并通过拍照回传,对配电线路本体缺陷、通道隐患进行核查。
2、无人机独特的空中视角有利于查找常规手段难以发现的设备缺陷,但传统的架空线路标示牌主要供人工巡视使用,却无法进入无人机镜头。因此,现阶段主要依靠运维人员辨认无人机获取的机巡照片中电力设备周围参照物来确认缺陷或隐患位置,效率和精准度低,且对现场经验要求高。此外,随着城市快速发展,架空线路设备迁改频繁,地理环境经常发生变化,人工通过周围参照物确认缺陷或隐患位置的方式在适应环境变化方面存在欠缺。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高无人机巡检照片使用效能的智能机巡专用杆塔标示牌及其控制方法。
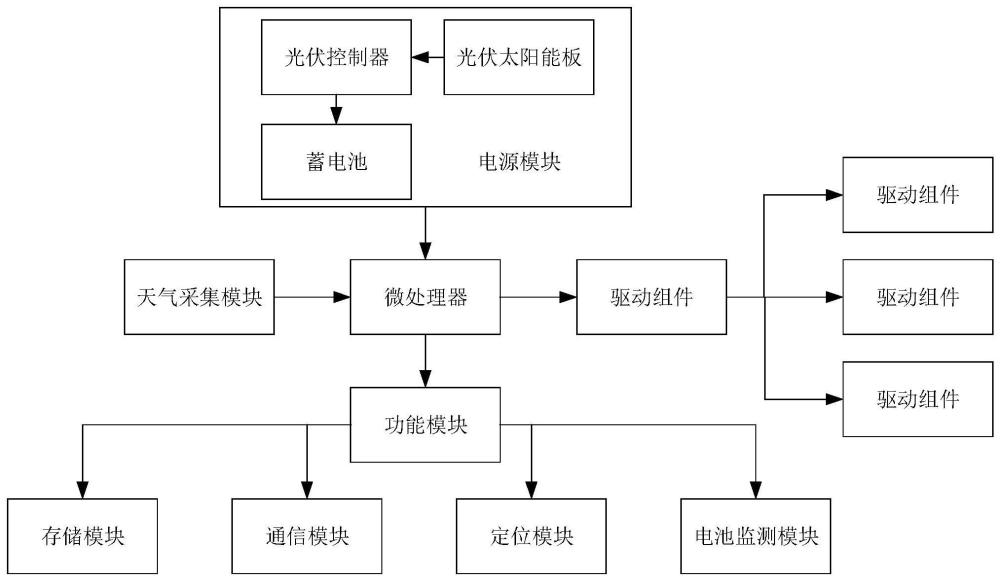
2、第一方面,本申请提供了一种智能机巡专用杆塔标示牌,包括:
3、固定板,用于显示杆塔信息;
4、驱动组件,与固定板连接,用于驱动固定板运动;
5、定位模块,用于获取固定板的位姿信息;
6、通信模块,用于与无人机无线通信并获取无人机的位置信息;
7、微处理器,与驱动组件、定位模块和通信模块连接,用于根据固定板的位姿信息和无人机的位置信息控制驱动组件动作,以令固定板运动至杆塔信息暴露于无人机的云台视线覆盖范围内。
8、在其中一个实施例中,驱动装置包括:
9、第一电机,用于驱动固定板沿竖直方向升降运动;
10、第二电机,用于驱动固定板绕竖直轴线360°旋转;
11、第三电机,用于驱动固定板在垂直方向180°翻转。
12、在其中一个实施例中,定位模块包括:位于固定板上的至少三个定位芯片。
13、在其中一个实施例中,杆塔标示牌还包括与微处理器连接的天气采集模块;
14、天气采集模块用于获取包括气象信息;
15、微处理器用于根据气象信息控制驱动组件调整固定板的位姿。
16、在其中一个实施例中,杆塔指示牌还包括与微处理器连接的电源模块;电源模块包括光伏太阳能板、光伏控制器和蓄电池。
17、在其中一个实施例中,杆塔指示牌还包括电池监测模块,用于监测蓄电池的电量及故障情况。
18、第二方面,本申请提供了一种智能机巡专用杆塔标示牌的使用方法,应用于上述智能机巡专用杆塔标示牌,使用方法包括:
19、通过微处理器基于固定板的位姿信息和无人机的位置信息,获取固定板与无人机的相对位置;
20、通过微处理器根据相对位置控制驱动组件动作,以令固定板运动至杆塔信息暴露于无人机的云台视线覆盖范围内,实现无人机镜头追踪功能。
21、在其中一个实施例中,智能机巡专用杆塔标示牌通过配置在固定板上的光伏太阳能板储能供电,使用方法还包括:
22、获取太阳辐射角;
23、通过微处理器根据太阳辐射角控制驱动组件调整固定板的位姿,实现太阳追踪功能。
24、在其中一个实施例中,通信模块包括待机状态和工作状态;通信模块在无人机移动至信号接收范围内时,由待机状态转换至工作状态,并在工作状态下获取无人机的位置信息;
25、当通信模块在工作状态时,关闭微处理器的太阳能追踪功能;
26、当通信模块在待机状态时,启用微处理器的太阳能追踪功能。
27、在其中一个实施例中,使用方法还包括:
28、获取风力等级;
29、通过微处理器根据风力等级控制驱动组件调整固定板的位姿;当风机等级大于阈值时,将固定板调整至防风状态。
30、上述智能机巡专用杆塔标示牌及其使用方法,该杆塔指示牌包括:固定板,用于显示杆塔信息;驱动组件,与固定板连接,用于驱动固定板运动;定位模块,用于获取固定板的位姿信息;通信模块,用于与无人机无线通信并获取无人机的位置信息;微处理器,与驱动组件、定位模块和通信模块连接,用于根据固定板的位姿信息和无人机的位置信息控制驱动组件动作,以令固定板运动至杆塔信息暴露于无人机的云台视线覆盖范围内。通过将杆塔标示牌改为可以调整位姿的结构,结合通信模块定位无人机位置,从而令杆塔标示牌可根据无人机的位置调整位姿使固定板朝向无人机,令无人机在巡检时拍摄的巡检照片均带有杆塔信息,以便快速且准确地定位巡检照片所对应的位置,进而便于快速且准确地定位缺陷或隐患位置。
技术特征:
1.一种智能机巡专用杆塔标示牌,其特征在于,所述杆塔标示牌包括:
2.根据权利要求1所述的智能机巡专用杆塔标示牌,其特征在于,所述驱动装置包括:
3.根据权利要求1所述的智能机巡专用杆塔标示牌,其特征在于,所述定位模块包括:位于所述固定板上的至少三个定位芯片。
4.根据权利要求1所述的智能机巡专用杆塔标示牌,其特征在于,所述杆塔标示牌还包括与所述微处理器连接的天气采集模块;
5.根据权利要求1所述的智能机巡专用杆塔标示牌,其特征在于,所述杆塔指示牌还包括与所述微处理器连接的电源模块;所述电源模块包括光伏太阳能板、光伏控制器和蓄电池。
6.根据权利要求5所述的智能机巡专用杆塔标示牌,其特征在于,所述杆塔指示牌还包括电池监测模块,用于监测所述蓄电池的电量及故障情况。
7.一种智能机巡专用杆塔标示牌的使用方法,其特征在于,应用于如权利要求1至6任一项所述智能机巡专用杆塔标示牌,所述使用方法包括:
8.根据权利要求7所述的智能机巡专用杆塔标示牌的使用方法,其特征在于,所述智能机巡专用杆塔标示牌通过配置在所述固定板上的光伏太阳能板储能供电,所述使用方法还包括:
9.根据权利要求8所述的智能机巡专用杆塔标示牌的使用方法,其特征在于,所述通信模块包括待机状态和工作状态;所述通信模块在所述无人机移动至信号接收范围内时,由待机状态转换至工作状态,并在工作状态下获取所述无人机的位置信息;
10.根据权利要求7所述的智能机巡专用杆塔标示牌的使用方法,其特征在于,所述使用方法还包括:
技术总结
本申请涉及一种智能机巡专用杆塔标示牌及其控制方法。标示牌包括固定板,用于显示杆塔信息;驱动组件,与固定板连接,用于驱动固定板运动;定位模块,用于获取固定板的位姿信息;通信模块,用于与无人机无线通信并获取无人机的位置信息;微处理器,与驱动组件、定位模块和通信模块连接,用于根据固定板的位姿信息和无人机的位置信息控制驱动组件动作,以令固定板运动至杆塔信息暴露于无人机的云台视线覆盖范围内。采用本申请公开的智能机巡专用杆塔标示牌及其控制方法能够提高无人机巡检照片使用效能。
技术研发人员:王喜军,王毅,曾松涛,李梦阳,王府,申浩播
受保护的技术使用者:广东电网有限责任公司广州供电局
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!