一种基于VR视景仿真的新型飞行器训练方法及系统与流程
本技术涉及飞行器训练的,特别是一种基于vr视景仿真的新型飞行器训练方法及系统。
背景技术:
1、当前各种形式的单人飞行器正在不断的被研发出来,包括采用电动的大型载人4旋翼飞行器,采用涡喷发动机的背负式或脚踏式飞行器。此类单人飞行器具有设计新颖、前沿技术应用多、人机耦合性大的特点,传统的载人飞行器例如飞机等飞行员通过按钮操控杆等间接的控制飞机,不会直接控制飞机。但新型的单人飞行器飞行过程与人体姿态、重心等变化耦合极大,很难通过传统飞机的方式在地面搭建一整套模拟系统对飞行员进行模拟训练,但直接由飞行员进行自由飞行又有着巨大的安全风险,因此迫切需要开发出一套既能在实际飞行器上进行训练,又能相对的保证安全的系统。
技术实现思路
1、本发明针对于单人飞行器,飞行员训练难度大,风险高,成本高的问题,提供一种基于vr视景仿真的新型飞行器训练方法及系统。不同于传统的飞机,单人飞行器的飞行效果和飞行状态极大的受到飞行员个人能力和操作的影响,全模拟的效果很难创造真实的状态,真实状态飞行员直接进行大机动的训练风险又很高。本技术提供的方案应用于新型单人飞行器的飞行训练系统,将vr视景仿真与实际飞行结合起来,通过借助vr的模拟现实与真实飞行器结合来实现飞行员对于单人飞行训练。
2、第一方面,提供了一种基于vr视景仿真的新型飞行器训练方法,包括:
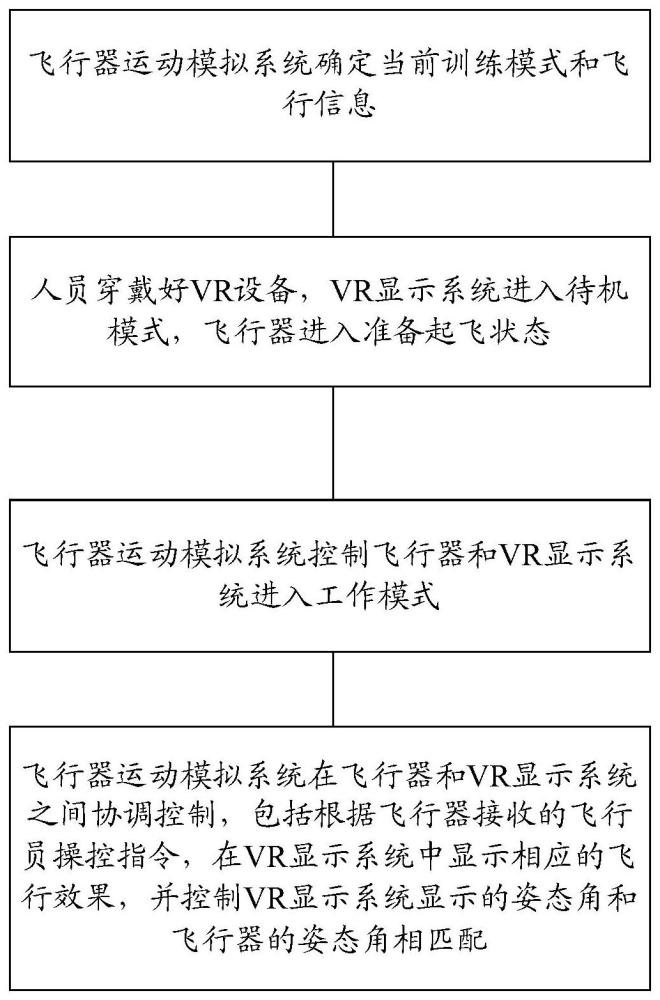
3、控制飞行器和vr显示系统进入工作模式;
4、在飞行器和vr显示系统之间协调控制,包括根据飞行器接收的飞行员操控指令,在vr显示系统中显示相应的飞行效果,并控制vr显示系统显示的姿态角和飞行器的姿态角相匹配。
5、结合第一方面,在第一方面的某些实现方式中,所述方法还包括:
6、确定训练模式;
7、在开始训练后,根据设定的训练模式,向vr显示系统与飞行器发送指令。
8、结合第一方面,在第一方面的某些实现方式中,所述训练模式包括纯vr模式与飞行模式;
9、如果是纯vr模式,则在开始训练后,向飞行器发送原地待命指令;
10、如果是飞行模式,则在开始训练后,向飞行器发送悬浮指令或低速飞行指令。
11、结合第一方面,在第一方面的某些实现方式中,所述方法还包括:
12、确定飞行信息;
13、在开始训练后,根据设定的飞行信息,向vr显示系统发送指令,以使vr显示系统显示所述飞行信息对应的画面。
14、结合第一方面,在第一方面的某些实现方式中,所述飞行信息包括以下至少一项:位置信息、飞行状态、飞行航路、最大飞行速度。
15、结合第一方面,在第一方面的某些实现方式中,所述根据设定的飞行信息,向vr显示系统发送指令,包括:
16、根据预先设定的位置信息,调用全球地形海拔高度数据库,得到对应的地形数据;
17、获取卫星图片,并将卫星图片和地形数据结合在一起,在地形上加载出地貌;
18、控制vr显示系统进行地形、地貌的显示加载;
19、根据预先设定的飞行航路和最大飞行速度,规划出预计的飞行路线,并通过vr显示系统显示。
20、结合第一方面,在第一方面的某些实现方式中,所述根据飞行器接收的飞行员操控指令,在vr显示系统中显示相应的飞行效果,并控制vr显示系统显示的姿态角和飞行器的姿态角相匹配,包括:
21、调用飞行仿真模型,实时计算在飞行员的操控指令下飞行器飞行的模拟仿真信息,所述模拟仿真信息包括模拟速度、模拟位置和模拟姿态信息;
22、将全部的模拟仿真信息发送给vr显示系统,vr显示系统根据接收到的模拟仿真信息更新显示内容;
23、将模拟仿真信息中的模拟姿态信息发送给飞行器,以使飞行器在飞行员的操控指令下实现相应的姿态变化。
24、结合第一方面,在第一方面的某些实现方式中,所述飞行员操控指令包括手柄摇杆指令,用于指示vr显示系统显示的飞行效果。
25、结合第一方面,在第一方面的某些实现方式中,所述飞行效果包括飞行速度,手柄摇杆指令解算飞行速度通过以下方程进行:
26、vxcmd=(ka1×px+ka2×px×px×px)×kv_x
27、vycmd=(ka1×py+ka2×py×py×py)×kv_y
28、vzcmd=(ka1×pz+ka2×pz×pz×pz)×kv_z
29、其中ka1与ka2和kv分别为计算系数和速度比例系数,vxcmd是期望向前的飞行速度,vycmd是期望的侧向飞行速度,vzcmd是高度方向期望速度,px是前进后退方向的摇杆摆动量,py是左右的摇杆摆动量,pz是高度推杆摆动量,对于px、py和pz,摇杆摆动量均是-1到+1变化,当摇杆处于中间位置时,摆动量为0,输出的期望飞行速度也是0,摇杆摆动到底,摆动量为1,输出为最大的期望速度kv m/s。
30、结合第一方面,在第一方面的某些实现方式中,所述飞行效果包括飞行高度,手柄摇杆指令解算飞行高度通过以下方程进行:
31、
32、vz=[c5 c6]z
33、z=zold+tz*vz
34、其中,vz是vr显示系统显示的高度方向的速度,z是当前高度,zold是上一步的高度,tz为高度计算的时间步长,c1至c6的系数通过高度方向速度传递函数计算得到。
35、结合第一方面,在第一方面的某些实现方式中,所述飞行效果包括飞行姿态角,手柄摇杆指令解算飞行姿态角通过以下方程进行:
36、angle_x=vx*k
37、angle_y=vy*k
38、angle_x为vr显示系统显示的俯仰角,angle_y为vr显示系统显示的方位角,vx是vr显示系统显示的前向速度,vy是vr显示系统显示的侧向速度,k为系数。
39、结合第一方面,在第一方面的某些实现方式中,所述控制vr显示系统显示的姿态角和飞行器的姿态角相匹配,包括:
40、根据飞行器当前角度和vr显示系统输出的当前姿态角的偏差,确定飞行器姿态角的控制指令。
41、结合第一方面,在第一方面的某些实现方式中,所述控制vr显示系统显示的姿态角和飞行器的姿态角相匹配,还包括:
42、根据每一步飞行器角度和vr显示系统输出的姿态角的偏差累计,确定飞行器姿态角的控制指令。
43、结合第一方面,在第一方面的某些实现方式中,所述控制vr显示系统显示的姿态角和飞行器的姿态角相匹配,还包括:
44、根据飞行器上imu输出的角速度,确定飞行器姿态角的控制指令。
45、结合第一方面,在第一方面的某些实现方式中,飞行器姿态角的控制指令满足:
46、angle_x_cmd=angle_x_error*kp+angle_x_int*ki+wx*kd
47、angle_y_cmd=angle_y_error*kp+angle_y_int*ki+wy*kd
48、anlge_i_cmd是发送给飞行器的期望角度指令,anlge_i_error是飞行器当前角度和vr显示系统输出的当前姿态角的偏差,angle_i_int是每一步飞行器角度和vr显示系统输出的姿态角的偏差累计,wi是飞行器上imu输出的角速度,kp、ki、kd均为系数,i=x,y。
49、结合第一方面,在第一方面的某些实现方式中,所述控制vr显示系统显示的姿态角和飞行器的姿态角相匹配,还包括以下至少一项:
50、根据质心偏差和对应的修正系数k1,修正飞行器姿态角的控制指令;
51、根据飞行器上imu反馈角速度anglei积分得到的角度和对应的修正系数k2,修正飞行器姿态角的控制指令,i=x,y。
52、结合第一方面,在第一方面的某些实现方式中,所述质心偏差的解算通过以下方程进行:
53、
54、
55、asj(s=1,2,3,4j=1,2,3,4)为每个压力踏板采集的压力值,g为飞行人员的体重,bsj(s=1,2,3,4j=1,2,3,4)为计算质心偏差的系数,pressx和pressy分别反映质心在前进后退方向和左右方向上的偏载程度。
56、第二方面,提供了一种飞行器运动模拟系统,所述飞行器运动模拟系统用于执行如上述第一方面中的任意一种实现方式中所述的方法。
57、第三方面,提供了一种基于vr视景仿真的新型飞行器训练系统,所述系统包括飞行器、飞行器运动模拟系统和vr显示系统,所述飞行器运动模拟系统为如上述第二方面中的任意一种实现方式中所述的飞行器运动模拟系统。
58、与现有技术相比,本技术提供的方案至少包括以下有益技术效果:
59、对于单人飞行器,目前缺乏有效的训练方法,只能通过实际飞行来锻炼飞行员的飞行能力与飞行技巧,具有较大的风险且训练时长严重不足,同时,其他类似vr训练技术,例如汽车vr训练等,在纯vr的技术状态下进行训练,与真实环境存在着较大的差异,本发明将vr技术与真实环境相结合,首次研发出了针对单人飞行器的vr训练技术,填补单人飞行器的飞行员训练技术途径的空白。
- 还没有人留言评论。精彩留言会获得点赞!