一种机器人运动仿真平台的制作方法
本技术涉及运动仿真平台,尤其涉及一种机器人运动仿真平台。
背景技术:
1、公告号为cn201921022476.x的中国实用新型专利,公开了机器人综合仿真教学平台,包括平台主体,平台主体上分别安装有仿真演示器、示教器、伺服电机、伺服驱动器、运动控制器、外部io拓展模块、电机调试模块,伺服电机的输出端与伺服驱动器的输入端连接,伺服驱动器的输出端与运动控制器连接,仿真演示器包括显示器;所述平台主体上设置有滑轨,滑轨内套设有滑块,滑块的另一端交接有升降机构,升降机构的另一端通过止推轴承与仿真演示器连接;仿真演示器的下端设置有支板,支板置于平台主体上。上述专利提供了一种仿真演示器方便移动以保证观看效果、避免阻挡其他装置的机器人综合仿真教学平台。
2、但是发明人认为现有的机器人活动关节数量不同,相应的针对具有不同活动关节的机器人仿真平台上的伺服电机、伺服驱动器的数量也不同,因此具有一定数量伺服电机、伺服驱动器的仿真平台只能针对具有相同数量伺服电机、伺服驱动器的机器人进行仿真。
技术实现思路
1、为解决背景技术中存在的技术问题,本实用新型提出一种机器人运动仿真平台。
2、本实用新型提出的一种机器人运动仿真平台,包括台体、控制器、多个运动仿真驱动模块,控制器安装在台体上,多个运动仿真驱动模块均与台体可拆卸连接,且多个运动仿真驱动模块均与控制器连接。
3、优选地,台体上开设有多个插接槽,多个插接槽内一一对应插接有多个安装件,多个运动仿真驱动模块一一对应固定在安装件上。
4、优选地,插接槽内设有与控制器连接的插头,安装件插接端上开设有与插头适配连接的插接件,且插接件与运动仿真驱动模块连接,安装件插接到插接槽内时,插头与插接件插接以连接运动仿真驱动模块与控制器。
5、优选地,运动仿真驱动模块包括驱动器、伺服电机,插接件与插头插接状态下,伺服电机连接控制器,且驱动器与伺服电机之间电连接。
6、优选地,运动仿真驱动模块还包括插接模块,插接模块上具有一个或多个第一接口、第二接口,第一接口通过第一外接线与驱动器连接,第二接口通过第二外接线与伺服电机连接以连接驱动器和伺服电机。
7、优选地,安装件上安装有紧固螺栓,台体上开设有与紧固螺栓适配旋接的螺纹孔。
8、优选地,台体上还安装有显示屏、开关按钮、电气元件、示教器照明灯。
9、本实用新型中所提出的机器人运动仿真平台通过设置的多个可拆卸的运动仿真驱动模块,使得该装置满足具有不同数量活动关节的机器人的仿真需求,扩大使用范围,运动仿真驱动模块的安装与拆卸简便快捷,另外用于安装运动仿真驱动模块的安装件在插入到台体上的插接槽内时,插接件与插头插接以连接控制器与运动仿真驱动模块中的驱动器,方便控制器与驱动器之间的连接。
技术特征:
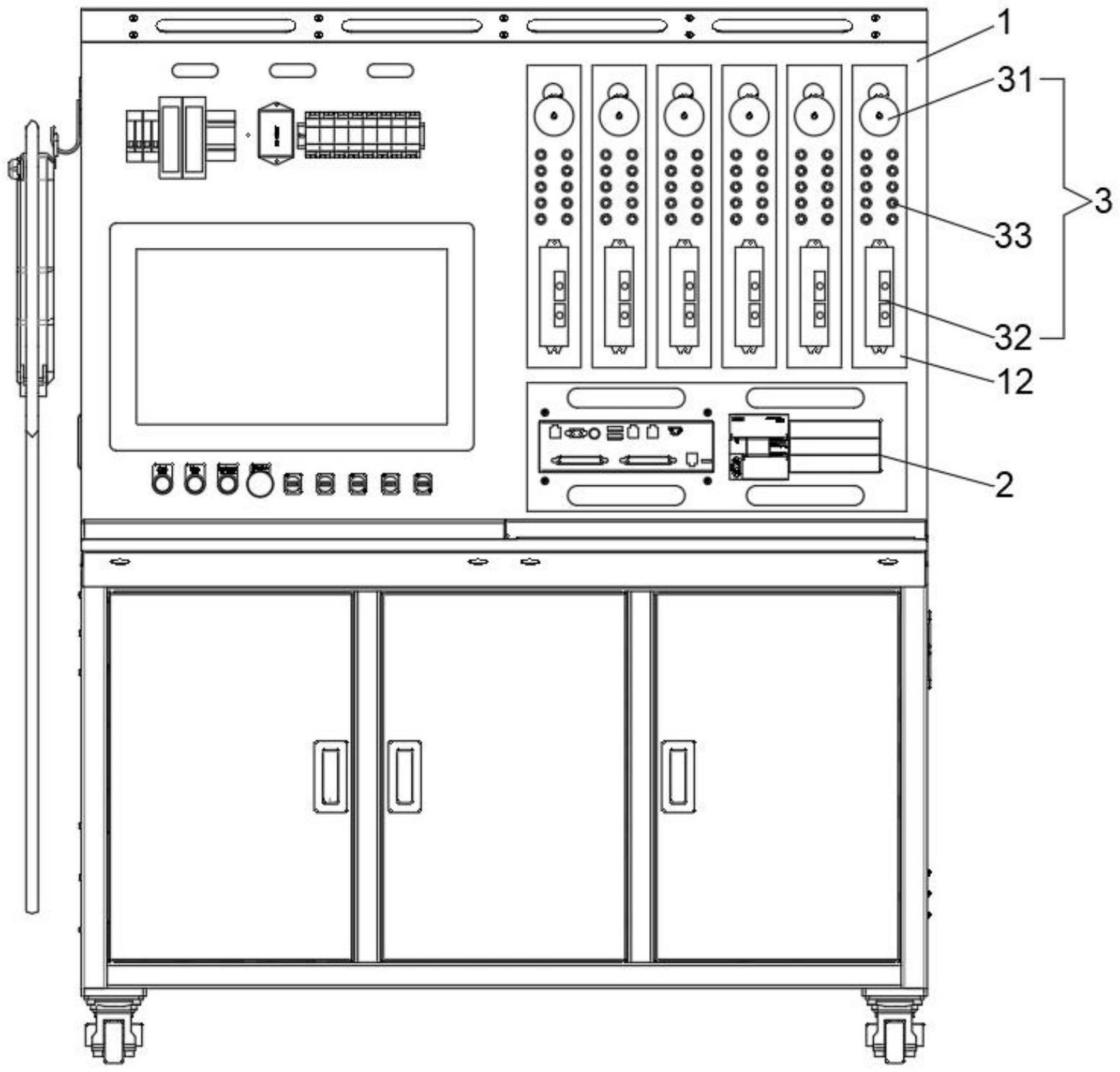
1.一种机器人运动仿真平台,其特征在于,包括台体(1)、控制器(2)、多个运动仿真驱动模块(3),控制器(2)安装在台体(1)上,多个运动仿真驱动模块(3)均与台体(1)可拆卸连接,且多个运动仿真驱动模块(3)均与控制器(2)连接。
2.根据权利要求1所述的一种机器人运动仿真平台,其特征在于,台体(1)上开设有多个竖直布置的插接槽(11),多个插接槽(11)内一一对应插接有多个安装件(12),多个运动仿真驱动模块(3)一一对应固定在安装件(12)上。
3.根据权利要求2所述的一种机器人运动仿真平台,其特征在于,插接槽(11)内设有与控制器(2)连接的插头,安装件(12)插接端上开设有与插头适配连接的插接件,且插接件与运动仿真驱动模块(3)连接,安装件(12)插接到插接槽(11)内时,插头与插接件插接以连接运动仿真驱动模块(3)与控制器(2)。
4.根据权利要求3所述的一种机器人运动仿真平台,其特征在于,运动仿真驱动模块(3)包括驱动器(31)、伺服电机(32),插接件与插头插接状态下,伺服电机(32)连接控制器(2),且驱动器(31)与伺服电机(32)之间电连接。
5.根据权利要求4所述的一种机器人运动仿真平台,其特征在于,运动仿真驱动模块(3)还包括插接模块(33),插接模块(33)上具有一个或多个第一接口、第二接口,第一接口通过第一外接线与驱动器(31)连接,第二接口通过第二外接线与伺服电机(32)连接以连接驱动器(31)和伺服电机(32)。
6.根据权利要求2所述的一种机器人运动仿真平台,其特征在于,安装件(12)上安装有紧固螺栓,台体(1)上开设有与紧固螺栓适配旋接的螺纹孔。
7.根据权利要求1所述的一种机器人运动仿真平台,其特征在于,台体(1)上还安装有显示屏、开关按钮、电气元件、示教器照明灯。
技术总结
本技术公开了一种机器人运动仿真平台,包括台体、控制器、多个运动仿真驱动模块,控制器安装在台体上,多个运动仿真驱动模块均与台体可拆卸连接,且多个运动仿真驱动模块均与控制器连接,台体上开设有多个插接槽,多个插接槽内一一对应插接有多个安装件,多个运动仿真驱动模块一一对应固定在安装件上,本技术中所提出的机器人运动仿真平台通过设置的多个可拆卸的运动仿真驱动模块,使得该装置满足具有不同数量活动关节的机器人的仿真需求,运动仿真驱动模块的安装与拆卸简便快捷,另外用于安装运动仿真驱动模块的安装件在插入到台体上的插接槽内时,插接件与插头插接以连接控制器与运动仿真驱动模块中的驱动器。
技术研发人员:汪波,武凯,丁运峰,袁学超,杨宸,束明智
受保护的技术使用者:芜湖固高自动化技术有限公司
技术研发日:20230407
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!