一种训练机的仿真操纵杆的制作方法
本技术涉及仿真实训,具体涉及一种训练机的仿真操纵杆。
背景技术:
1、直升机是以航空发动机驱动旋翼旋转作为升力和推进力来源,能在大气中垂直起落及悬停并能进行前、后飞、定点回转等可控飞行的重于空气的航空器。
2、为了降低训练成本并保证训练安全性,通常会对直升机进行仿真模拟,即在训练机上进行仿真实训,使学员熟悉各部件的操作。
3、相对于其他飞行器,直升机的操纵杆能对直升机进行升降、倾斜和运动等多种控制,是培训中重要的一环,因此,若能使仿真操纵杆在操纵体验上接近实战将大幅提升训练效果。
4、在专利cn201220526726.5中,公开了一种直升机电机人感仿真操纵系统,该仿真操纵系统对操纵杆的力反馈效果进行了模拟,但本身结构和布局与真实情景差距较大,导致训练效果不佳。
技术实现思路
1、本实用新型的目的在于克服现有技术的缺点,提供了一种训练机的仿真操纵杆,具体通过以下技术方案来实现:
2、一种训练机的仿真操纵杆,包括机架、杆套和摆臂,其中:
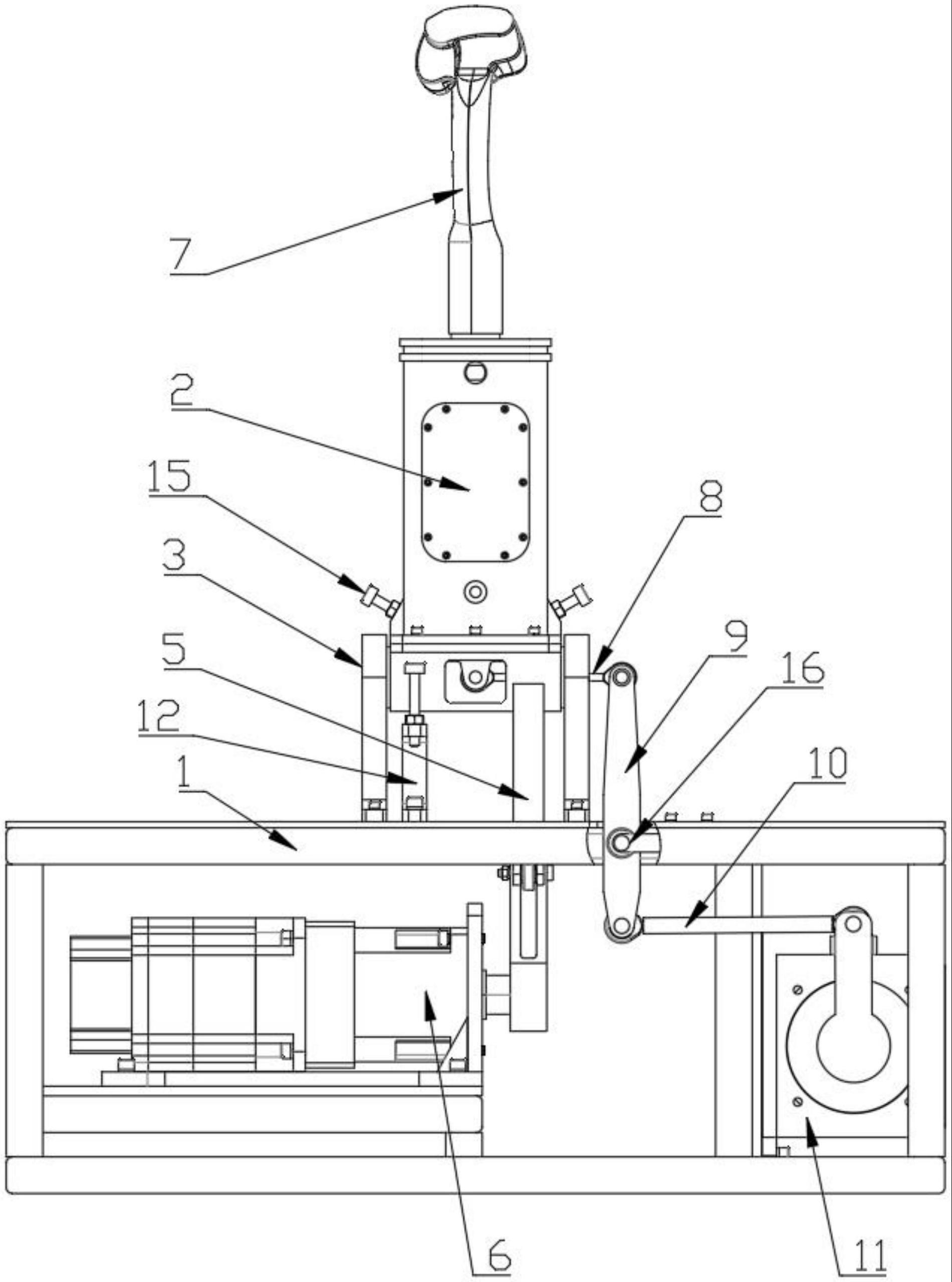
3、所述杆套的底部铰接在铰支座上;所述铰支座安装固定在机架的顶部;所述杆套内设有中置杆;所述杆套的底部还与俯仰轴支臂固定连接;所述俯仰轴支臂的另一端与电机一的输出端相连;所述电机一安装设置在机架内;所述中置杆的顶部与杆头相连,底部与关节轴承一相连;所述摆臂设置在铰支座旁,所述摆臂的一端与关节轴承一相连,另一端与关节轴承二相连;所述关节轴承二的另一端与电机二的输出端相连。
4、可选或优选地,还包括限位底座;所述限位底座安装固定在机架上,位于杆套的下方;所述杆套的下部设有凸檐;所述限位底座上设有调节螺杆;所述调节螺杆位于凸檐的下方,能够通过调节自身的高度限制杆套的前后俯仰角度。
5、可选或优选地,还包括限位螺钉;所述限位螺钉的数量为两个;每个所述限位螺钉均倾斜插设在杆套的下部,能够通过调节限位螺钉的插入深度限制杆头的左右摇摆角度。
6、可选或优选地,所述摆臂铰接在摆臂座上;所述摆臂座安装固定在机架的顶部,使摆臂仅能在竖直平面内摆动。
7、可选或优选地,所述电机一和电机二均为伺服电机;所述电机一和所述电机二的输出端均固定连接有电机摆臂;所述电机一和所述电机二均通过电机摆臂与俯仰轴支臂和关节轴承二相连。
8、可选或优选地,所述杆套和中置杆之间通过销轴相连。
9、基于上述技术方案,可产生如下技术效果:
10、本实用新型提供的一种训练机的仿真操纵杆,由电机模拟力矩,使用方便,拉动时顺滑稳定,在操纵体验和外观效果上近似于实战操纵,能提供良好的训练效果。
技术特征:
1.一种训练机的仿真操纵杆,其特征在于:包括机架(1)、杆套(2)和摆臂(9),其中:
2.根据权利要求1所述的一种训练机的仿真操纵杆,其特征在于:还包括限位底座(12);所述限位底座(12)安装固定在机架(1)上,位于杆套(2)的下方;所述杆套(2)的下部设有凸檐(13);所述限位底座(12)上设有调节螺杆(14);所述调节螺杆(14)位于凸檐(13)的下方,能够通过调节自身的高度限制杆套(2)的前后俯仰角度。
3.根据权利要求1所述的一种训练机的仿真操纵杆,其特征在于:还包括限位螺钉(15);所述限位螺钉(15)的数量为两个;每个所述限位螺钉(15)均倾斜插设在杆套(2)的下部,能够通过调节限位螺钉(15)的插入深度限制杆头(7)的左右摇摆角度。
4.根据权利要求1所述的一种训练机的仿真操纵杆,其特征在于:所述摆臂(9)铰接在摆臂座(16)上;所述摆臂座(16)安装固定在机架(1)的顶部,使摆臂(9)仅能在竖直平面内摆动。
5.根据权利要求1所述的一种训练机的仿真操纵杆,其特征在于:所述电机一(6)和电机二(11)均为伺服电机;所述电机一(6)和所述电机二(11)的输出端均固定连接有电机摆臂;所述电机一(6)和所述电机二(11)均通过电机摆臂与俯仰轴支臂(5)和关节轴承二(10)相连。
6.根据权利要求1所述的一种训练机的仿真操纵杆,其特征在于:所述杆套(2)和中置杆(4)之间通过销轴(17)相连。
技术总结
本技术提供一种训练机的仿真操纵杆,包括杆套(2)和摆臂(9),所述杆套(2)的底部铰接在铰支座(3)上,其内设有中置杆(4);所述杆套(2)的底部还与俯仰轴支臂(5)固定连接;所述俯仰轴支臂(5)的另一端与电机一(6)的输出端相连;所述中置杆(4)的顶部与杆头(7)相连,底部与关节轴承一(8)相连;所述摆臂(9)设置在铰支座(3)旁,所述摆臂(9)的一端与关节轴承一(8)相连,另一端与关节轴承二(10)相连;所述关节轴承二(10)的另一端与电机二(11)的输出端相连。本技术由电机模拟力矩,使用方便,拉动时顺滑稳定,在操纵体验和外观结果上近似于实战操纵,能提供良好的训练效果。
技术研发人员:王露国,甘雨池
受保护的技术使用者:四川知周科技有限责任公司
技术研发日:20230629
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!