用于仿生学教育的模块化气动形变积木教具及仿生机器人
本发明属于教育玩具,具体涉及一种用于仿生学教育的模块化气动形变积木教具及仿生机器人。
背景技术:
1、当前市场上缺乏能够让儿童直观学习和动手操作的仿生学教育工具,特别是可以促进steam教育的实践学习工具。现有仿生学教育工具多数为软体机器人,机器人技术在教育领域的应用已引起广泛关注,特别是作为增强儿童实践能力和创新思维的教学工具,其潜力不容忽视。机器人技术特别适用于培养儿童模仿生物机械动作的能力,从而在解决问题和创新方面激发他们的潜力。
2、尽管如此,现有的可编程机器人系统存在明显局限。首先,传统机器人通常依赖重型机械组件,如电机和伺服器,这些组件的刚性结构限制了机器人的动作流畅性。例如,它们难以准确模仿鱼类的优美滑行或蠕虫的有节奏蠕动,这种动作的局限性可能会抑制儿童的创造力和想象力。其次,尽管软体机器人技术在仿生设计方面取得了显著进展,并且其灵活性和适应性更适合模仿各种生物动作,但其在教育领域的应用仍面临重大挑战。特别是在steam(科学、技术、工程、艺术和数学)教育中,软体机器人的制造和气动控制过程复杂度高,需要专业知识和特定设备,这些要求超出了大多数教育环境的资源和能力范围。同时,其往往依赖复杂的数字和电气系统,这对儿童来说是一个很高的门槛。
3、基于此,本发明提供一种新型机器人系统,该系统结合了软体机器人的更贴近自然运动的变形方式,相对于现有技术能够更为适合儿童教育环境,激发和培养儿童的实践技能和创新,同时可以极大降低其制作与学习成本。
技术实现思路
1、本发明的目的在于针对现有技术的不足,提供一种用于仿生学教育的模块化气动形变积木教具及仿生机器人,该方案无需依赖复杂的数字和电气系统,易于组装,并具有高度可扩展性,可促进儿童对生物模仿的理解和应用。
2、本发明采用的技术方案如下:
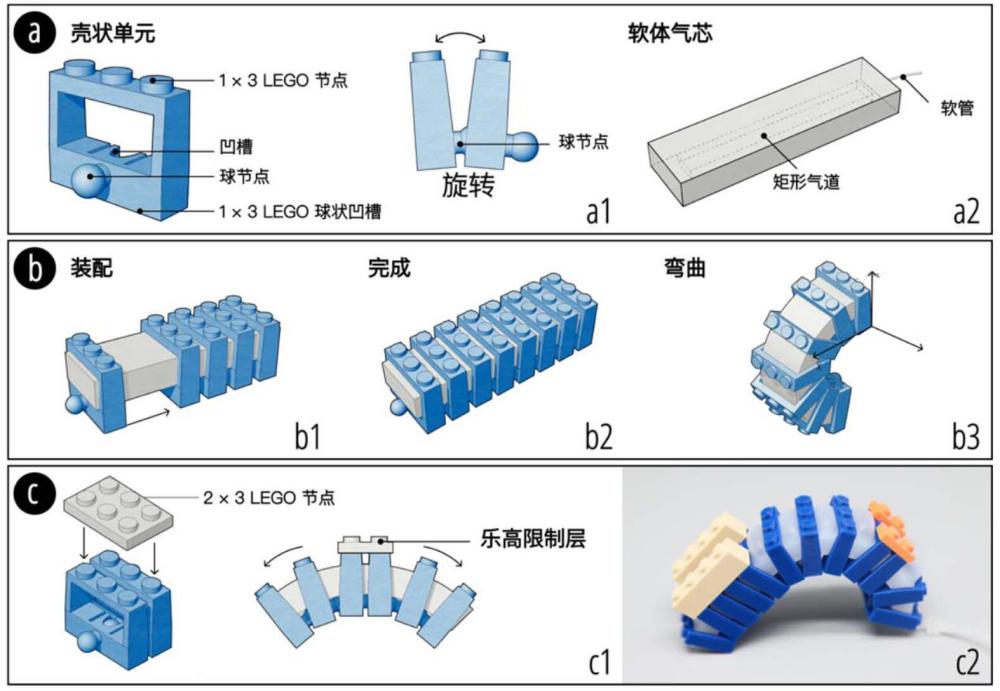
3、一种用于仿生学教育的模块化气动形变积木教具,包括变形模组,变形模组由软体气芯嵌套在壳体内形成,所述软体气芯通过软管连接气泵,所述壳体由一种或多种框架形壳状单元构成,用于限制所述软体气芯的变形,通过控制壳状单元的种类及连接可以控制变形模组的柔性变形方式。
4、上述技术方案中,进一步地,所述壳状单元上还设有球节点,球节点包括凸出的球体及球状的凹槽,不同壳状单元之间能够通过球节点进行插接。
5、进一步地,变形模组的柔性变形方式包括如下五种基础变形:单轴弯曲、双轴弯曲、三轴弯曲、伸长变形、及扭转变形。
6、进一步地,单轴弯曲的变形模组中:壳状单元为方形框架,在方形框架的一边中点处设有球节点,凸出的球体及球状的凹槽分别设于方向框架的两侧表面,该种壳状单元通过球节点拼插构成壳体,软体气芯插入于该壳体内,通过气泵向软体气芯内充气则变形模组发生单轴弯曲变形;
7、双轴弯曲的变形模组、三轴弯曲的变形模组均与单轴弯曲的变形模组构成相同,不同的是双轴弯曲的变形模组中其壳状单元的球节点设置在方形框架的一边端点处,通过气泵向软体气芯内充气则变形模组发生双轴弯曲变形;而三轴弯曲的变形模组中其壳状单元的框架形状为平行四边形,通过气泵向软体气芯内充气则变形模组发生三轴弯曲变形;
8、伸长变形的变形模组中:壳状单元为不带有球节点的方形框架,一个或多个该种壳状单元构成壳体,软体气芯插入于该壳体内,通过气泵向软体气芯内充气则变形模组发生伸长变形;
9、扭转变形的变形模组中:壳状单元为带有球节点的半框架,其为所述方形框架的一半,且在半框架的两开放端一端设置凸出的球体,另一端设置球状的凹槽,该种壳状单元通过上下反向倾斜拼插构成壳体,软体气芯插入于该壳体内,通过气泵向软体气芯内充气则变形模组发生扭转变形。
10、进一步地,所述壳状单元表面设有与乐高通用的插接点,通过与乐高积木配合实现限制对应位置软体气芯的变形。
11、进一步地,所述教具还包括连接件,用于实现壳体与壳体间的连接,所述连接件可以为用于与所述插接点拼接的乐高积木,也可以为用于与所述球节点拼接的含有多个球状凹槽或含有多个凸起球体的结构单元,也可以为用于与所述软管连接的双向或多向宝塔接头。
12、进一步地,在所述软体气芯与气泵之间还设置有气阀,用于控制所述软管的通断。
13、进一步地,所述软体气芯为硅胶材料,所述壳状单元为pla材料,所述软管为硅胶材料。
14、本发明还提供一种仿生机器人,基于如上所述的任一种模块化气动形变积木教具实现,包括有一种或多种柔性变形方式的变形模组。
15、本发明还提供一种用于仿生学教育的模块化气动形变积木教学系统,包括:
16、观察学习模块,用于呈现自然界动物运动方式的静态或动态图,以及对应的抽象简化动态图,以便用户观察学习;
17、拼搭教程模块,用于展示利用模块化气动形变积木搭建模拟的与观察学校模块所展示图相对应的仿生机器人,并展示其动作原理及状态。
18、本发明的有益效果是:
19、本发明方案中通过使用基本的软体气芯作为变形执行器和可直接3d打印获得的壳状单元作为外部约束壳,实现了易于组装和高度可扩展性,同时整个模块化结构中无任何电子实体,可实现直观和有形的交互,具有更低的门槛和更高的可访问性,儿童可以构建模仿动物运动的机器,从而深入理解和应用真正的生物模仿功能。具体的,本发明现有技术相比具有如下优势:
20、- 创新的非电子解决方案:与依赖复杂电子和电气系统的现有教育工具不同,kipneu提供了一个完全气动的解决方案,降低了学习门槛,使其更具可及性。
21、- 模块化和可定制:传统的教育机器人通常很难定制和重构。kipneu通过其模块化的构建性砖块和可编程的阀门,提供了高度的定制性和灵活性。
22、- 促进生物模仿学习:kipneu不仅允许儿童构建机器人,还鼓励他们理解和模仿动物的运动,从而在steam教育中深入了解生物模仿,培养仿生思维并将其运用到创意搭建中。
23、- 安全性和互动性:灵活的形状变化和物理属性增强了教育工具的安全性,减少了与传统刚性玩具相关的潜在伤害。此外,灵活的变形允许更直观的形状和结构,以及更接近自然运动的运动,超越了传统玩具在交互可能性方面的限制。
24、- 更具有吸引力:可以动态形变的积木相较于静态的积木对于儿童来说更具有吸引力。
技术特征:
1.一种用于仿生学教育的模块化气动形变积木教具,其特征在于,包括变形模组,变形模组由软体气芯嵌套在壳体内形成,所述软体气芯通过软管连接气泵,所述壳体由一种或多种框架形壳状单元构成,用于限制所述软体气芯的变形,通过控制壳状单元的种类及连接可以控制变形模组的柔性变形方式。
2.根据权利要求1所述的用于仿生学教育的模块化气动形变积木教具,其特征在于,所述壳状单元上还设有球节点,球节点包括凸出的球体及球状的凹槽,不同壳状单元之间能够通过球节点进行插接。
3.根据权利要求2所述的用于仿生学教育的模块化气动形变积木教具,其特征在于,变形模组的柔性变形方式包括如下五种基础变形:单轴弯曲、双轴弯曲、三轴弯曲、伸长变形、及扭转变形。
4.根据权利要求3所述的用于仿生学教育的模块化气动形变积木教具,其特征在于,单轴弯曲的变形模组中:壳状单元为方形框架,在方形框架的一边中点处设有球节点,凸出的球体及球状的凹槽分别设于方向框架的两侧表面,该种壳状单元通过球节点拼插构成壳体,软体气芯插入于该壳体内,通过气泵向软体气芯内充气则变形模组发生单轴弯曲变形;
5.根据权利要求2所述的用于仿生学教育的模块化气动形变积木教具,其特征在于,所述壳状单元表面设有与乐高通用的插接点,通过与乐高积木配合实现限制对应位置软体气芯的变形。
6.根据权利要求5所述的用于仿生学教育的模块化气动形变积木教具,其特征在于,所述教具还包括连接件,用于实现壳体与壳体间的连接,所述连接件可以为用于与所述插接点拼接的乐高积木,也可以为用于与所述球节点拼接的含有多个球状凹槽或含有多个凸起球体的结构单元,也可以为用于与所述软管连接的双向或多向宝塔接头。
7.根据权利要求1所述的用于仿生学教育的模块化气动形变积木教具,其特征在于,在所述软体气芯与气泵之间还设置有气阀,用于控制所述软管的通断。
8.根据权利要求1所述的用于仿生学教育的模块化气动形变积木教具,其特征在于,所述软体气芯为硅胶材料,所述壳状单元为pla材料,所述软管为硅胶材料。
9.一种仿生机器人,其特征在于,基于如权利要求1-8任一项所述的模块化气动形变积木教具实现,包括有一种或多种柔性变形方式的变形模组。
10.一种用于仿生学教育的模块化气动形变积木教学系统,其特征在于,包括:
技术总结
本发明公开了一种用于仿生学教育的模块化气动形变积木教具及仿生机器人,所述教具包括变形模组,变形模组由软体气芯嵌套在壳体内形成,所述软体气芯通过软管连接气泵,所述壳体由一种或多种框架形壳状单元构成,用于限制所述软体气芯的变形,通过控制壳状单元的种类及连接可以控制变形模组的柔性变形方式。本发明通过使用基本的软体气芯作为变形执行器和可直接3D打印获得的壳状单元作为外部约束壳,实现了易于组装和高度可扩展性,同时整个模块化结构中无任何电子实体,可实现直观和有形的交互,具有更低的门槛和更高的可访问性,儿童可以构建模仿动物运动的机器,从而深入理解和应用真正的生物模仿功能。
技术研发人员:王冠云,郑琛达,陶冶,付彦博,祝贶祺,李孟洋,张李康,孙凌云
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!