智能翻转眼镜的制作方法
本技术属于眼镜和近视防控,具体涉及多用途智能眼镜及镜架。
背景技术:
1、目前市场上眼镜产品有很多种,其中涉及带有翻转功能的眼镜主要也有眼镜上方带有转轴的手动上翻眼镜,还有带夹片的结构的翻转太阳镜挂镜。共同特点是靠具有一定过赢配合的转轴和轴套固定在铰链位置,因此眼镜的轴套和转轴必须配合比较紧才能随时停留在某个位置,这样在翻转时感觉转轴必须有一定的紧固度,翻转较费力,时间久了铰链磨损严重会松脱失灵,手上有脏东西时会把镜片弄脏。有中间带有一根轴的手动翻转眼镜,俗称翻转拍;也有为了省力,在巨大的镜架上设置了反复间歇翻转的正反转镜,以取代手动翻转的正反转拍四个镜片,眼镜外形整体体积庞大,佩戴起来非常沉重,也不美观,只能短时间锻炼使用。微型电机安放在镜架中间需占据较大空间,影响美观。
技术实现思路
1、本实用新型旨在克服上述技术中存在的不足之处,提供一种美观实用,结构轻巧,在看近和望远时自动翻转镜片的智能翻转眼镜,使用起来轻松方便,因此本实用新型可以作为有效防控近视的眼镜。也可用作两种用途镜片或两个度数的镜片快速切换的场合。
2、本实用新型的技术解决方案是这样实现的:
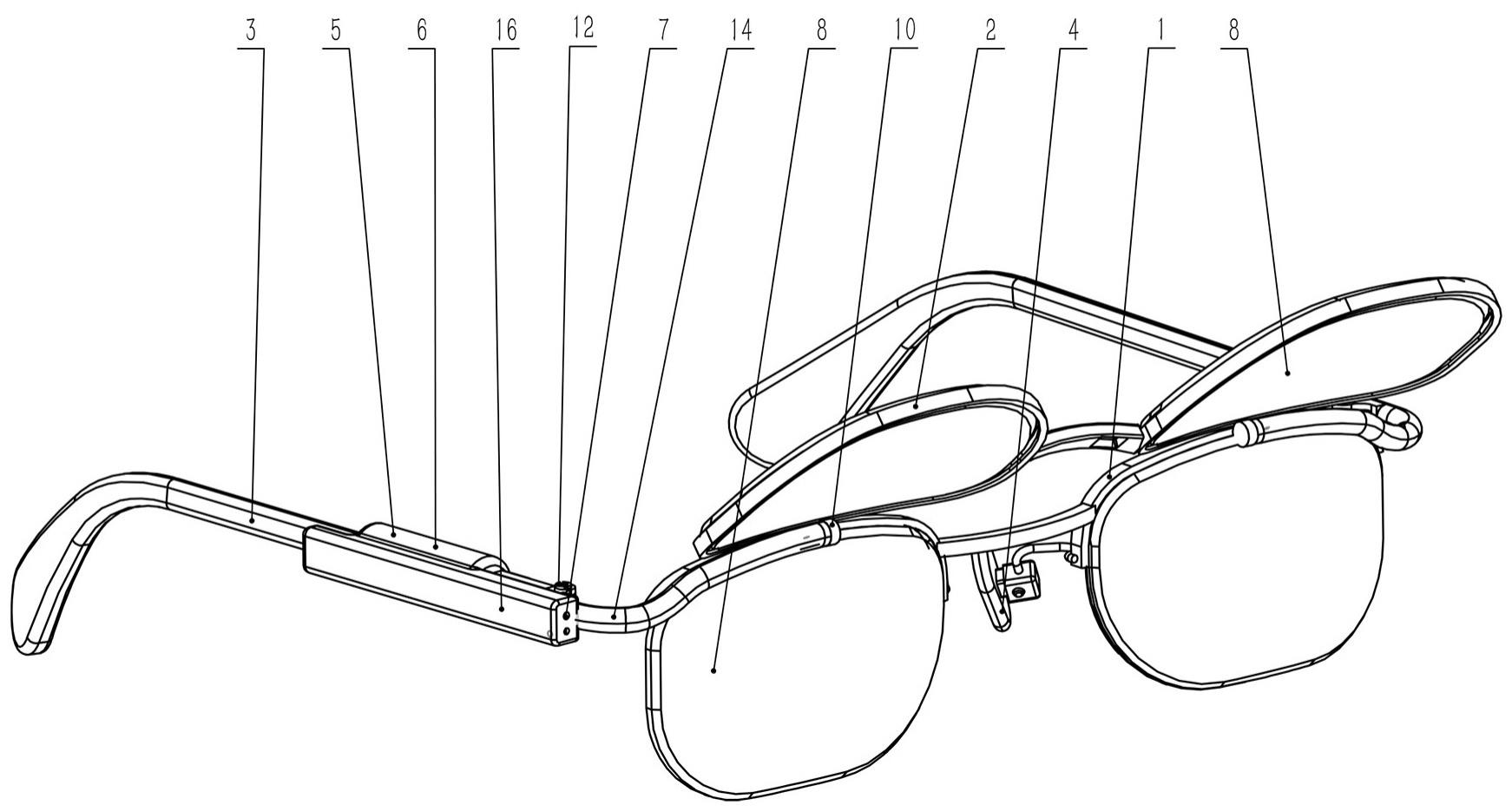
3、一种智能翻转眼镜,主要包括固定镜架、翻转镜架、镜腿和鼻托,固定镜架由翻转轴(10)铰接连接翻转镜架,其特征是:固定镜架设置空心弯管,空心弯管内滑动设置柔性传动轴,空心弯管从翻转轴一端弯曲一定弧度后转向镜腿方向,镜腿处设置微型电机和减速器,减速器输出轴驱动空心弯管内的柔性传动轴带动翻转镜框翻转。
4、进一步地,微型电机由控制器控制自动翻转,控制器的控制系统由距离传感器作为控制信号,控制微型电机旋转。
5、进一步地,所述距离传感器为红外线距离传感器或激光距离传感器。
6、进一步地,所述柔性传动轴为具有柔性弯曲传动功能的结构。
7、进一步地,柔性传动轴为蛇骨链、软轴、万向联轴器、多节管柱、方形链、或者其他项链或锁链中的至少一种。
8、进一步地,空心弯管14除了采用整体式弯管结构外,还可以是由两个壳体组合围成的空心管腔。
9、进一步地,所述减速器为齿轮减速器或行星轮减速器或谐波减速器或摆线轮减速器或齿轮减速器或涡轮蜗杆减速器或放大扭矩的微型减速器。
10、进一步地,镜腿设置微型振动电机或扬声器。
11、进一步地,在固定镜架侧面拐角处设置两个圆锥齿轮,两个圆锥齿轮轴互成90︒±30︒角度。
12、进一步地,所述柔性传动轴通过快速连接传动结构进行连接。
13、进一步地,所述的固定镜框和/或翻转镜框设置镜片。
14、进一步地,所述控制器和电池设置在眼镜腿内。
15、进一步地,所述镜片为凹透镜片或凸透镜片或棱镜之一或其组合,或者是其他功能镜片。
16、进一步地,所述翻转镜架内镶装镜片,固定镜架内不镶装镜片。
17、有益效果
18、与现有技术相比,本实用新型的智能翻转眼镜的有益效果是:
19、1.外形美观。本实用新型采用柔性传动轴和空心弯管把占据较大体积的微型电机和减速器放到了镜腿上并能把动力传动给翻转镜架,柔性传动轴和空心弯管解决了翻转镜架与镜腿上的电机之间复杂空间曲线的传动难题,使镜架上再没有多出的物体,外观与普通眼镜差异不大,不会产生不自然的感觉,变角度空间曲线传动部件没有突出物不影响眼镜的美观,微型电机和减速器和自动控制器件安放在镜腿上带有科幻感。
20、2.使用方便。采用了激光距离传感器和控制系统智能控制镜片的翻转,在看近时镜片向上翻起来,看远时,镜片自动下翻,反之亦然,不再用手去翻转,使用非常方便。
21、3.自动提醒。镜腿内设置微型振动电机或微型扬声器或微型喇叭,在视物距离太近时发出振动提示或者语音提示,改变用眼距离或坐姿,防控近视的发展。
22、3.视野更开阔。本实用新型在看书写字和平视望远时都可以用整个镜片来观看,视野和单光普通镜片一样开阔。
23、4.安全。本实用新型不开刀不做激光手术,镜片与眼睛不接触,采用纯物理方法,用于近视防控无任何伤害和副作用。
24、5.应用范围广。本实用新型不仅适合防控近视,也适合做老花镜,翻转镜架1内的镜片8为偏光镜或太阳镜片即成为太阳镜。本实用新型也适合其他快速切换内外镜片的场合,如控制系统经专门设计后也能作为视功能训练眼镜。眼镜还可以结合耳机和mp3、摄像头拍照、打电话等功能,成为多功能智能眼镜。
技术特征:
1.一种智能翻转眼镜,主要包括固定镜架(1)、翻转镜架(2)、镜腿(3)和鼻托(4),固定镜架(1)由翻转轴(10)铰接连接翻转镜架(2),其特征是:固定镜架(1)设置空心弯管(13),空心弯管(13)内滑动设置柔性传动轴(14),空心弯管(13)从翻转轴(10)一端弯曲一定弧度后转向镜腿(3)方向,镜腿(3)处设置微型电机(5)和减速器(6),减速器(6)输出轴(9)驱动空心弯管(13)内的柔性传动轴(14)带动翻转镜架(2)翻转。
2.根据权利要求1所述的智能翻转眼镜,其特征在于:微型电机(5)由控制器(16)控制自动翻转,控制器(16)的控制系统由距离传感器(7)作为控制信号,控制微型电机(5)旋转,所述距离传感器(7)为红外线距离传感器或激光距离传感器。
3.根据权利要求1所述的智能翻转眼镜,其特征在于:所述柔性传动轴(14)为具有柔性弯曲传动功能的结构。
4.根据权利要求3所述的智能翻转眼镜,其特征在于:所述柔性传动轴(14)为蛇骨链、软轴、万向联轴器、多节管柱、方形链、项链、锁链其中的至少一种。
5.根据权利要求3所述的智能翻转眼镜,其特征在于:所述柔性传动轴(14)通过快速连接传动结构进行连接。
6.根据权利要求1所述的智能翻转眼镜,其特征在于:所述减速器(6)为齿轮减速器或行星轮减速器或谐波减速器或摆线轮减速器或齿轮减速器或涡轮蜗杆减速器或放大扭矩的微型减速器。
7.根据权利要求1所述的智能翻转眼镜,其特征在于:所述镜腿(3)设置微型振动电机或扬声器。
8.根据权利要求1所述的智能翻转眼镜,其特征在于:所述固定镜架(1)和翻转镜架(2)对应位置分别设置永久磁铁。
9.根据权利要求1所述的智能翻转眼镜,其特征在于:所述固定镜架(1)侧面拐角处设置两个圆锥齿轮,两个圆锥齿轮轴互成90°±30°角度。
10.根据权利要求1或8所述的智能翻转眼镜,其特征在于:所述的固定镜架(1)和/或翻转镜架(2)设置镜片(8)。
技术总结
本技术提供一种智能翻转眼镜,主要包括镜腿、镜架和鼻托组成,固定镜框通过翻转轴铰接连接翻转镜架,其特征是:固定镜框设置空心弯管,空心弯管从镜框端弯转一定弧度后弯向镜腿方向,空心弯管内设置柔性传动轴,柔性传动轴一端与翻转轴连接并与翻转镜架连接,镜腿上设置微型电机和减速器,微型减速电机的输出轴与柔性传动轴的另一端直接连接或通过联轴器连接,微型电机由控制系统自动控制驱动减速器输出轴带动柔性传动轴与翻转轴驱动翻转镜框和镜片翻转。
技术研发人员:刘忠臣
受保护的技术使用者:大连灵感科技有限公司
技术研发日:20221217
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!