一款红外识别追踪光学成像系统的制作方法
本发明属于光学成像系统,更具体地,涉及一款应用于智能消费电子产品的眼球追踪光学成像系统。
背景技术:
1、近年来,随着智能家居、电动汽车、虚拟现实交互等行业的更新迭代、不断发展,眼球追踪也逐渐开始逐步应用到这些领域。以往采用基于陀螺仪的头动感知方式来锁定目标,这会让使用者不自然的移动头部去锁定目标,容易产生头晕等不适。正常情况下,头动控制视野,眼动锁定目标才是符合人性与自然。为了实现眼球追踪的可行性,需要一款符合要求的红外识别追踪镜头,本专利是基于此背景下提出的。
技术实现思路
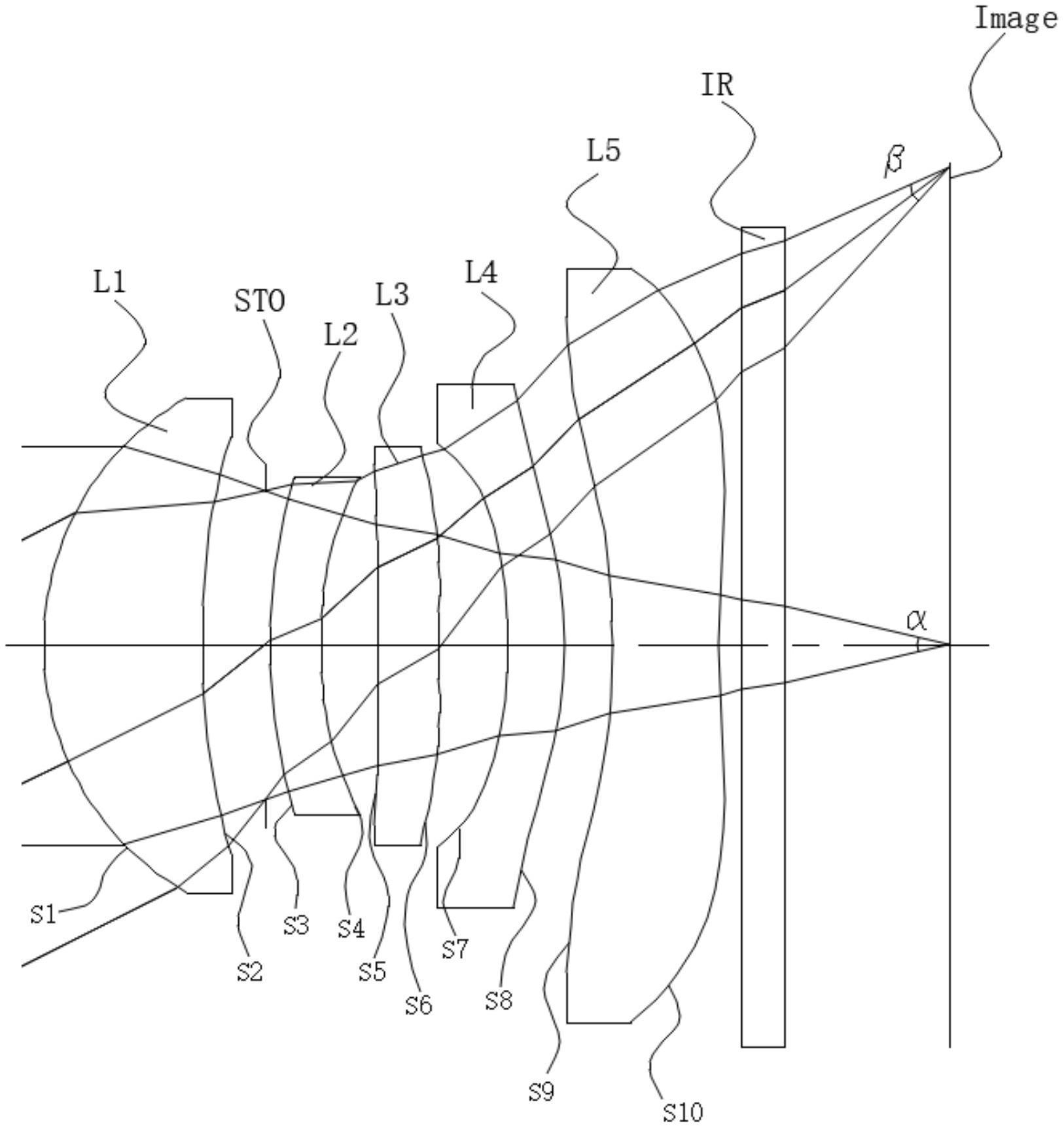
1、本发明提供了一款红外识别追踪光学成像系统,包含五片非球面透镜,从物面至像面依次为:第一透镜(l1)、光阑(sto)、第二透镜(l2)、第三透镜(l3)、第四透镜(l4)、第五透镜(l5)。所述第一透镜(l1)为正透镜,其物侧面为凸面,像侧面为凹面;所述第二透镜(l2)为负透镜,其物侧面为凸面,像侧面为凹面;所述第三透镜(l3)为正透镜,其物侧面为凹面,像侧面为凸面;所述第四透镜(l4)为正透镜,其物侧面为凹面,像侧面为凸面;所述第五透镜(l5)为负透镜,其物侧面为凹面,像侧面为凹面;所述红外识别追踪光学成像系统满足以下关系式:0.7<f1/f<1.1;-4.6<f2/f<-3.7;6.1<f3/f<6.8;1.7<f4/f<2.2;-1.1<f5/f<-0.6;其中,f1为所述第一透镜元件(l1)的有效焦距,f2为所述第二透镜元件(l2)的有效焦距,f3为所述第三透镜元件(l3)的有效焦距,f4为所述第四透镜元件(l4)的有效焦距,f5为所述第五透镜元件(l5)的有效焦距,f为所述红外识别追踪光学成像系统的有效焦距。
2、优选地,所述第一透镜(l1),第二透镜(l2),第三透镜(l3),第四透镜(l4),第五透镜(l5)的材质均为塑胶且满足下列关系式:2<ct1/et1<3;0.5<ct2/et2<1;1<ct3/et3<2;0.5<ct4/et4<1;1<ct5/et5<2;其中,ct1为所述第一透镜(l1)在光轴上的厚度,et1为所述第一透镜(l1)最大口径处的厚度;ct2为所述第二透镜(l2)在光轴上的厚度,et2为所述第二透镜(l2)最大口径处的厚度;ct3为所述第三透镜(l3)在光轴上的厚度,et3为所述第三透镜(l3)最大口径处的厚度;ct4为所述第四透镜(l4)在光轴上的厚度,et4为所述第四透镜(l4)最大口径处的厚度;ct5为所述第五透镜(l5)在光轴上的厚度,et5为所述第五透镜(l5)最大口径处的厚度。
3、优选地,还满足下列关系式:f/d<2.3;其中,f为所述红外识别追踪光学成像系统的有效焦距;d为所述红外识别追踪光学成像系统的入瞳直径。
4、优选地,其特征在于,满足下列关系式:0.7<β/α<1;其中,β为最外视场光线汇聚到像面上的光锥角角度;α为中心视场光线汇聚到像面上的光锥角角度。
5、优选地,还满足下列关系式:0.25<t1/∑t<0.30;0.20<t2/∑t<0.25;0.25<t3/∑t<0.30;0.18<t4/∑t<0.23;其中,∑t为第一透镜(l1)、第二透镜(l2)、第三透镜(l3)、第四透镜(l4)、第五透镜(l5)之间在光轴上空气间隔的总和,t1,t2,t3,t4分别为第一透镜(l1)和第二透镜(l2)之间、第二透镜(l2)和第三透镜(l3)之间、第三透镜(l3)和第四透镜(l4)之间、第四透镜(l4)和第五透镜(l5)之间在光轴上的空气间隔。
6、(1)本发明具有较小的f数,光圈大,进光量充足;(2)本发明边缘视场拥有较高的相对照度,保证了整体画面的亮度均匀;(3)本发明的各透镜中心与边缘厚度适中,空气间隔小,有利于减小光学系统总长,有利于实现小型化;(4)本发明通过正负透镜相互组合、平衡各个镜片的光焦度,有利于减小像散、畸变,提高成像质量。
技术特征:
1.一款红外识别追踪光学成像系统,其特征在于,所述红外识别追踪光学成像系统包含五片非球面透镜,从物面至像面依次为:第一透镜(l1)、光阑(sto)、第二透镜(l2)、第三透镜(l3)、第四透镜(l4)、第五透镜(l5);
2.如权利要求1所述的红外识别追踪光学成像系统,其特征在于,所述第一透镜(l1),第二透镜(l2),第三透镜(l3),第四透镜(l4),第五透镜(l5)的材质均为塑胶且满足下列关系式:
3.如权利要求1所述的红外识别追踪光学成像系统,其特征在于,满足下列关系式:
4.如权利要求1所述的红外识别追踪光学成像系统,其特征在于,满足下列关系式:
5.如权利要求1所述的红外识别追踪光学成像系统,其特征在于,满足下列关系式:
技术总结
本发明公开了一款红外识别追踪光学成像系统,包含五片非球面透镜,从物面至像面依次为:第一透镜(L1)、光阑(STO)、第二透镜(L2)、第三透镜(L3)、第四透镜(L4)、第五透镜(L5)。第一透镜(L1)为正透镜;第二透镜(L2)为负透镜;第三透镜(L3)为正透镜;第四透镜(L4)为正透镜;第五透镜(L5)为负透镜。所述红外识别追踪成像系统满足关系式:0.7<f1/f<1.1;‑4.6<f2/f<‑3.7;6.1<f3/f<6.8;1.7<f4/f<2.2;‑1.1<f5/f<‑0.6。正负透镜组合有利于降低系统的公差敏感性、降低像差,具有良好的成像效果。
技术研发人员:钟有杰,朱佳巍,王旗
受保护的技术使用者:中山市众盈光学有限公司
技术研发日:20221227
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!