一种应用于激光雷达的光学镜头的制作方法
本发明涉及光学领域,尤其涉及一种光学镜头和车载激光雷达。
背景技术:
1、激光雷达(laser detection and ranging, ladar 或 light detection andranging, lidar)区别于传统的以微波和毫米波作为载波的雷达,是指以激光作为载波、以光电探测器作为接收器件、以光学镜头作为天线的光雷达。
2、其工作原理是向被测目标发射激光束,然后测量反射或散射信号的到达时间、强弱程度等参数,以确定目标的距离、方位、运动状态及表面光学特性,从而建立测量目标的三维成像信息。由于探测精度高、功耗低、体积小、易于装备等特点,目前激光雷达在地形测绘、城市建模、工业制造、自动驾驶,以及预警探测、制导、引信等技术中等领域已得到广泛的应用,具有良好的应用前景。
3、激光雷达的接收光学系统-接收镜头是为了尽可能地将由探测目标反射回来的激光能量会聚到探测器上。对于激光雷达的接收镜头来说,需要其具备采集微弱光信号的能力。为了提高激光雷达分辨率和精度,激光雷达接收镜头要尽可能实现更小的相对孔径(fnum),来增加镜头的通光能力;为了提升激光雷达的探测范围,需要更大的视场角;为了更好地实现环境光抑制,接收镜头需要实现更小的主光线角度(chief ray angle,cra)。但现有的镜头结构要实现较小的fnum、cra以及较大的视场角,会造成体积很大,难以放到车载激光雷达内部使用。
技术实现思路
1、由此原因,本申请的目的在于提供一种用于车载激光雷达的光学镜头,仅由七片玻璃镜片组成,且在保证大的视场角度,fnum值较小,cra也较小的特点之外,还能够同时实现高解像力和紧凑小体积的结构。
2、本发明实施例通过以下技术方案实施上述的目的。
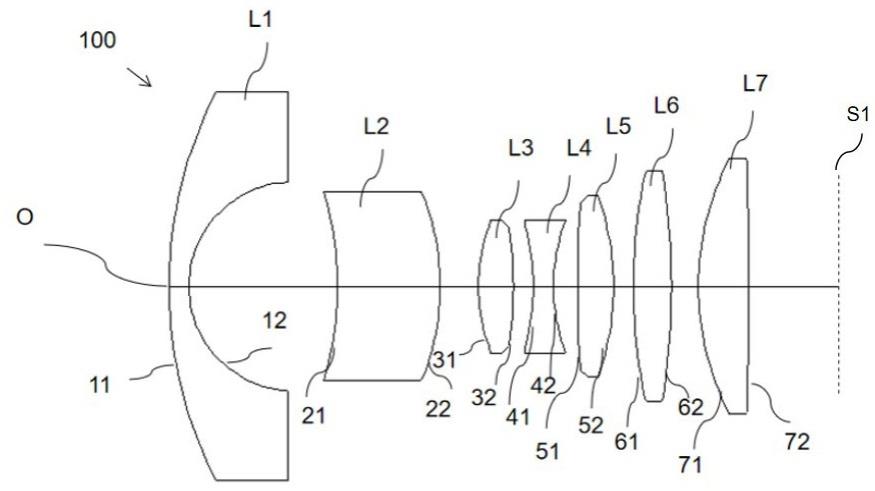
3、本发明提供一种应用于激光雷达的光学镜头,沿光轴从物侧到成像面依次包括:
4、具有负光焦度的第一透镜,所述第一透镜的像侧面为凹面;
5、具有正光焦度的第二透镜,所述第二透镜的物侧面为凹面,所述第二透镜的像侧面为凸面;
6、具有正光焦度的第三透镜,所述第三透镜的物侧面为凸面,所述第三透镜的像侧面为凸面;
7、具有负光焦度的第四透镜,所述第四透镜的物侧面为凹面;
8、具有正光焦度的第五透镜,所述第五透镜的像侧面为凸面;
9、具有正光焦度的第六透镜,所述第六透镜的物侧面为凸面,所述第六透镜的像侧面为凸面;
10、具有正光焦度的第七透镜,所述第七透镜的物侧面为凸面;
11、其中,所述光学镜头满足条件式:6.1<ttl/f<6.5,其中,ttl表示所述光学镜头的光学总长,f表示所述光学镜头的有效焦距;
12、其中,所述光学镜头满足条件式:1.70<tan(hfov)/fnum<1.80,其中,hfov为所述光学镜头的最大视场角的一半,tan(hfov)为hfov角度的正切,fnum为所述光学镜头的相对孔径;
13、其中,所述光学镜头满足条件式:cra<10°,其中cra为所述光学镜头在所述镜头最大视场角fov所对应的主光线角度。
14、进一步的,所述光学镜头满足条件式:-2.4<f1/f<-1.5,其中,f1表示所述第一透镜的焦距。
15、进一步的,所述光学镜头满足条件式:1.5<f3/f<2.4,其中,f3表示所述第三透镜的焦距。
16、进一步的,所述光学镜头满足条件式:-1.1<f4/f<-6,其中,f4表示所述第四透镜的焦距。
17、进一步的,所述光学镜头满足条件式:3.5<f7/f<5.9,其中,f7表示所述第七透镜的焦距。
18、进一步的,所述光学镜头满足条件式:0.8<r2/f<1.2,其中,r2表示所述第一透镜的像侧面的曲率半径。
19、进一步的,所述光学镜头满足条件式:10.1mm<ttl/tan(hfov)<10.8mm。
20、与现有技术相比,本发明的有益效果在于:
21、本发明实施例提供的一种光学镜头,包括一些设置的第一透镜至第七透镜,通过将第一透镜设置为具有负光焦度,当入射光线经过具有负光焦度的第一透镜l1,能够有效地将较大视场范围的光线耦合进入光学镜头中,配合第一透镜的物侧面、像侧面分别为凸面、凹面的面型设计,从而增大光学镜头的视场角,并且缩短光学镜头的光学总长。第二透镜具有正光焦度,且第二透镜的物侧面为凸面、像侧面为凹面,有助于降低光线在第二透镜的物侧面和第二透镜的像侧面上的入射角度,降低光线在透镜的表面上的反射,并且还能校正像差。第三透镜具有正光焦度,且第三透镜的物侧面、像侧面于为凸面,有利于合理分配光学镜头的光焦度,使得光学镜头整体的光焦度朝物侧方向移动的幅度减小,有助于缩短光学镜头的光学总长,实现小型化设计需求。搭配具有负光焦度的第四透镜,能够较好的矫正光学镜头的场曲和像散。通过将第四透镜的物侧面和像侧面均设置为凹面,能够进一步缩短光学镜头的光学总长,使得四片透镜的结构更为紧凑。第五透镜具有正光焦度,且第五透镜的像侧面为凸面,有助于降低光线在透镜表面上的入射角,进一步压缩主光线角度,同时还能校正像差。第六透镜具有正光焦度,有助于降低光线在透镜表面上的入射角,进一步压缩主光线角度,同时还能校正像差。第七透镜具有正光焦度,有助于降低光线在透镜表面上的入射角,进一步压缩主光线角度,同时还能校正像差,并且能够与具有较大主光角的图像传感器相匹配,从而提高成像质量。
22、当光学镜头满足6.1<ttl/f<6.5时,通过限定光学镜头的光学总长与焦距关系,能够在满足光学镜头实现小型化设计的同时满足光学镜头具有较大景深的效果。另一方面,光学镜头满足上述关系式时,还能确保光学镜头的光学总长较小,从而使得光学镜头具有较小的体积,当光学镜头用于车载激光雷达时,满足车载激光雷达的空间的需求。
23、以此法设计的车载激光雷达的光学镜头,仅由七片玻璃镜片组成,且在保证大的视场角度,fnum值较小,cra也较小的特点之外,还能够做到结构紧凑、压缩体积,同时实现高解像力。
技术特征:
1.一种应用于激光雷达的光学镜头,其特征在于,沿光轴从物侧到成像面依次包括:
2.根据权利要求1所述的光学镜头,其特征在于,所述光学镜头满足条件式:-2.4<f1/f<-1.5,其中,f1表示所述第一透镜的焦距。
3.根据权利要求1所述的光学镜头,其特征在于,所述光学镜头满足条件式:1.5<f3/f<2.4,其中,f3表示所述第三透镜的焦距。
4.根据权利要求1所述的光学镜头,其特征在于,所述光学镜头满足条件式:-1.1<f4/f<-6,其中,f4表示所述第四透镜的焦距。
5.根据权利要求1所述的光学镜头,其特征在于,所述光学镜头满足条件式:3.5<f7/f<5.9,其中,f7表示所述第七透镜的焦距。
6.根据权利要求1所述的光学镜头,其特征在于,所述光学镜头满足条件式:0.8<r2/f<1.2,其中,r2表示所述第一透镜的像侧面的曲率半径。
7.根据权利要求1所述的光学镜头,其特征在于,所述光学镜头满足条件式:10.1mm<ttl/tan(hfov)<10.8mm。
技术总结
本发明公开一种激光雷达光学镜头,该光学镜头共有七片具有屈折力的透镜,所述光学镜头包括:具有负光焦度的第一透镜,具有正光焦度的第二透镜,具有正光焦度的第三透镜,所述第三透镜的物侧面为凸面,具有负光焦度的第四透镜,具有正光焦度的第五透镜,具有正光焦度的第六透镜,具有正光焦度的第七透镜;所述光学镜头满足条件式:6.1<TTL/f<6.5,其中TTL为所述第一透镜的物侧面到所述光学镜头的成像面于所述光轴上的距离,f为所述光学镜头的焦距。从而能够保证光学镜头的光学总长保持在合理范围内,从而缩小光学镜的长度,同时保持在大视场角、小相对孔径的要求下的成像质量。
技术研发人员:刘祥彪,刘洋,梁薇
受保护的技术使用者:武汉墨光科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!