一种用于双目立体视觉系统的定焦镜头的制作方法
本申请涉及计算机视觉,尤其涉及一种用于双目立体视觉系统的定焦镜头。
背景技术:
1、双目立体视觉(binocular stereo vision)是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。双目立体视觉测量方法具有效率高、精度合适、系统结构简单、成本低等优点,非常适合于制造现场的在线、非接触产品检测和质量控制,例如医疗导航、机器人定位系统领域。
2、目前,在医疗设备定位和导航应用中,要求双目立体视觉系统具有较小体积,并且双目立体视觉系统在搭配2/3芯片使用时,要求其能在一定范围内精确的采集到标记点信息。因此,要求与双目立体视觉系统配套使用的镜头具有较高分辨率、景深大、低畸变、小体积以及大靶面等特性。
3、而现有使用的小体积(例如m12)镜头虽然在尺寸上满足了要求,但是该镜头的景深范围小、像高小且畸变大(至少-5%),无法满足定位与导航使用过程中对景深与畸变的要求;而工业镜头焦距在6mm-12mm内的镜头均为c接口,具有较低的低畸变,但是体积太大,无法安装应用于定位和导航设备中。
4、因此,亟待一种低畸变、小体积、大靶面的应用于双目立体视觉系统的镜头。
技术实现思路
1、本申请提供一种用于双目立体视觉系统的定焦镜头,以解决现有技术中的镜头无法将体积小、畸变低以及靶面三者同时满足的问题。
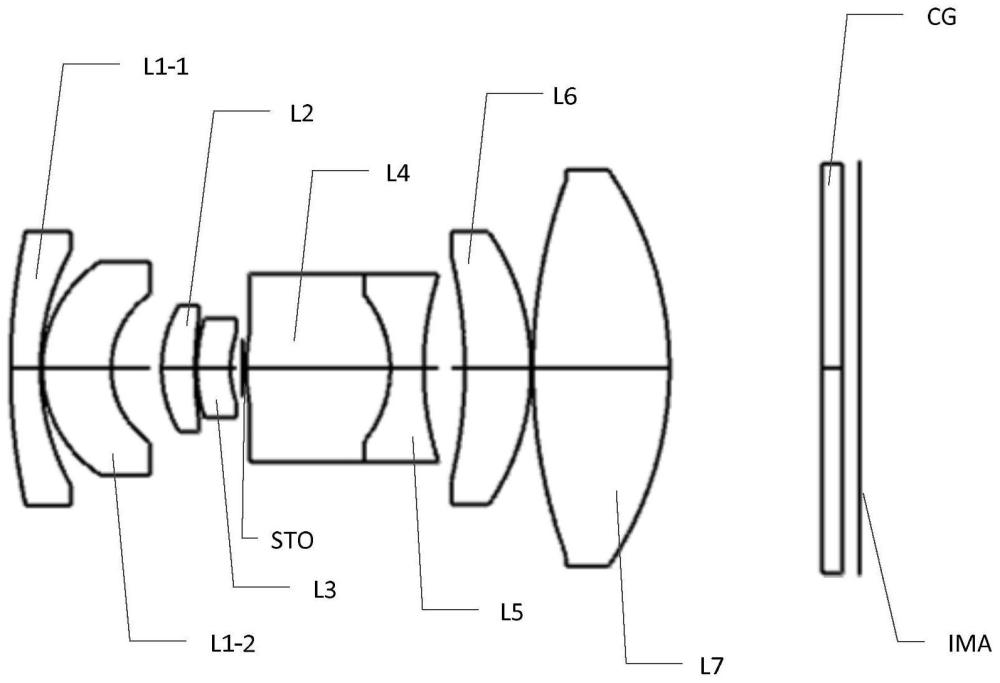
2、本申请实施例提供一种用于双目立体视觉系统的定焦镜头,包括沿光轴方向从物方到像方依次排列的第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜、第七透镜以及保护玻璃,上述透镜均为玻璃球面;
3、其中,所述第一透镜、所述第三透镜以及所述第五透镜具有负光焦度,所述第二透镜、所述第四透镜、所述第六透镜以及所述第七透镜具有正光焦度,且上述透镜满足下述参数条件:
4、0.165≤ct/(n*ic)≤0.187;
5、0.134≤(sag5-sag6)/(sag5+sag6)≤0.237;
6、0.240≤(sag9+sag10)/(sag9-sag10)≤0.331;
7、式中,ct为上述透镜的中心厚度,n为光学系统中透镜的数量,ic为镜头的像面直径,sag5、sag6分别为第三透镜对应的前表面与后表面的矢高,sag9、sag10分别为第五透镜对应的前表面与后表面的矢高。
8、本申请提供一种定焦镜头,用于双目立体视觉系统。本申请的定焦镜头通过调整镜片的光焦度、材料、数量、矢高以及光阑位置等,实现可见光波段下较好的成像质量,在保证光学系统景深范围较大的前提下,通过第三透镜和第五透镜共4个表面的形状优化来平衡整个光学系统的畸变,从而实现小畸变并获取标记点精确的物理信息;通过设定像面直径、透镜中心厚度和透镜数量的关系,实现镜头的大靶面和小体积。因此,本申请的定焦镜头在所有透镜的共同作用下,实现矫正镜头的像差达到低畸变、小体积、大靶面的效果。
技术特征:
1.一种用于双目立体视觉系统的定焦镜头,其特征在于,包括沿光轴方向从物方到像方依次排列的第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜、第七透镜以及保护玻璃,上述透镜均为玻璃球面;
2.根据权利要求1所述的定焦镜头,其特征在于,所述第一透镜的数量为一个或两个。
3.根据权利要求2所述的定焦镜头,其特征在于,所述第一透镜的数量为两个时,两个第一透镜沿光轴排列且皆具有负光焦度。
4.根据权利要求1所述的定焦镜头,其特征在于,所述第一透镜的光焦度满足-1.198≤φ1/φ≤-0.595,式中,φ1表示第一透镜总光焦度;φ表示该镜头整体的光焦度;
5.根据权利要求1所述的定焦镜头,其特征在于,所述第二透镜的阿贝数vd2和所述第三透镜的阿贝数vd3满足|vd2-vd3|≥17.965。
6.根据权利要求1所述的定焦镜头,其特征在于,所述第六透镜、所述第七透镜的折射率满足min(nd6,nd7)≥1.481,式中,nd6为第六透镜的折射率,nd7为第七透镜的折射率,min为取范围内的最小值。
7.根据权利要求1所述的定焦镜头,其特征在于,所述第三透镜的光焦度满足-1.074≤φ3/φ≤-0.683,式中,φ3表示第三透镜的光焦度,φ表示定焦镜头整体的光焦度;
8.根据权利要求1所述的定焦镜头,其特征在于,所述第五透镜的光焦度满足0.471≤φ5/φ≤-0.446,式中,φ5示第一透镜的光焦度,φ表示该镜头整体的光焦度。
9.根据权利要求1所述的定焦镜头,其特征在于,所述第七透镜的光焦度满足:0.661≤φ7/φ≤0.859,式中,φ7表示第七透镜的光焦度,φ表示该镜头整体的光焦度,
10.根据权利要求1所述的定焦镜头,其特征在于,所述第一镜头与所述第七镜头满足bfl/tth≥0.263,式中,bfl为第七透镜的像侧面的光轴中心至像面的距离,tth为第一透镜观察侧表面至第七透镜显示侧表面的轴上距离。
技术总结
本申请公开一种用于双目立体视觉系统的定焦镜头,通过调整镜片的光焦度、材料、数量、矢高以及光阑位置,实现可见光波段下较好的成像质量,在保证光学系统景深范围较大的前提下,通过优化第三、第五透镜的表面形状,平衡整个光学系统的畸变,实现小畸变并获取标记点精确的物理信息;通过设定像面直径、透镜中心厚度和透镜数量的关系,实现镜头的大靶面和小体积。本申请定焦镜头在所有透镜的共同作用下,以实现镜头的像差达到低畸变、小体积、大靶面的效果。
技术研发人员:何降云,韩冰,韩志敏,王平锋
受保护的技术使用者:佗道医疗科技有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!