一种成像镜头、成像模组及深度相机的制作方法
本申请涉及光学成像,具体涉及一种成像镜头、成像模组及深度相机。
背景技术:
1、近年来,随着3d传感的推广,很多行业都开始使用3d传感。除了手机和平板等终端行业以外,比较突出的是移动机器人行业,特别是在全球疫情蔓延期间,诸如清洁机器人、送餐机器人、送货机器人等应用非常迅速。
2、移动机器人所用的3d传感原理主要包括三种:结构光、飞行时间(time offlight,tof)和双目立体视觉。这三种原理的3d传感器的成像模组都使用了同样或者类似的成像镜头,成像镜头在水平方向和垂直方向上的有效焦距相同,而成像模组使用的图像传感器的纵横像素比率一般为4:3或者16:9,这样决定了成像模组在水平方向和垂直方向上的视场角为4:3或者16:9。但是某些应用场景上,希望在水平方向有一个很大的视场角,在垂直方向上的视场角反而不需要那么大,更希望在垂直方向有比较高精度的表现,上述成像模组难以满足这些应用场景的需求。
技术实现思路
1、本申请提出一种成像镜头、成像模组及深度相机,可以解决相关技术中的成像模组成像镜头在水平方向和垂直方向上的有效焦距相同,无法满足特定场景的需求技术问题。
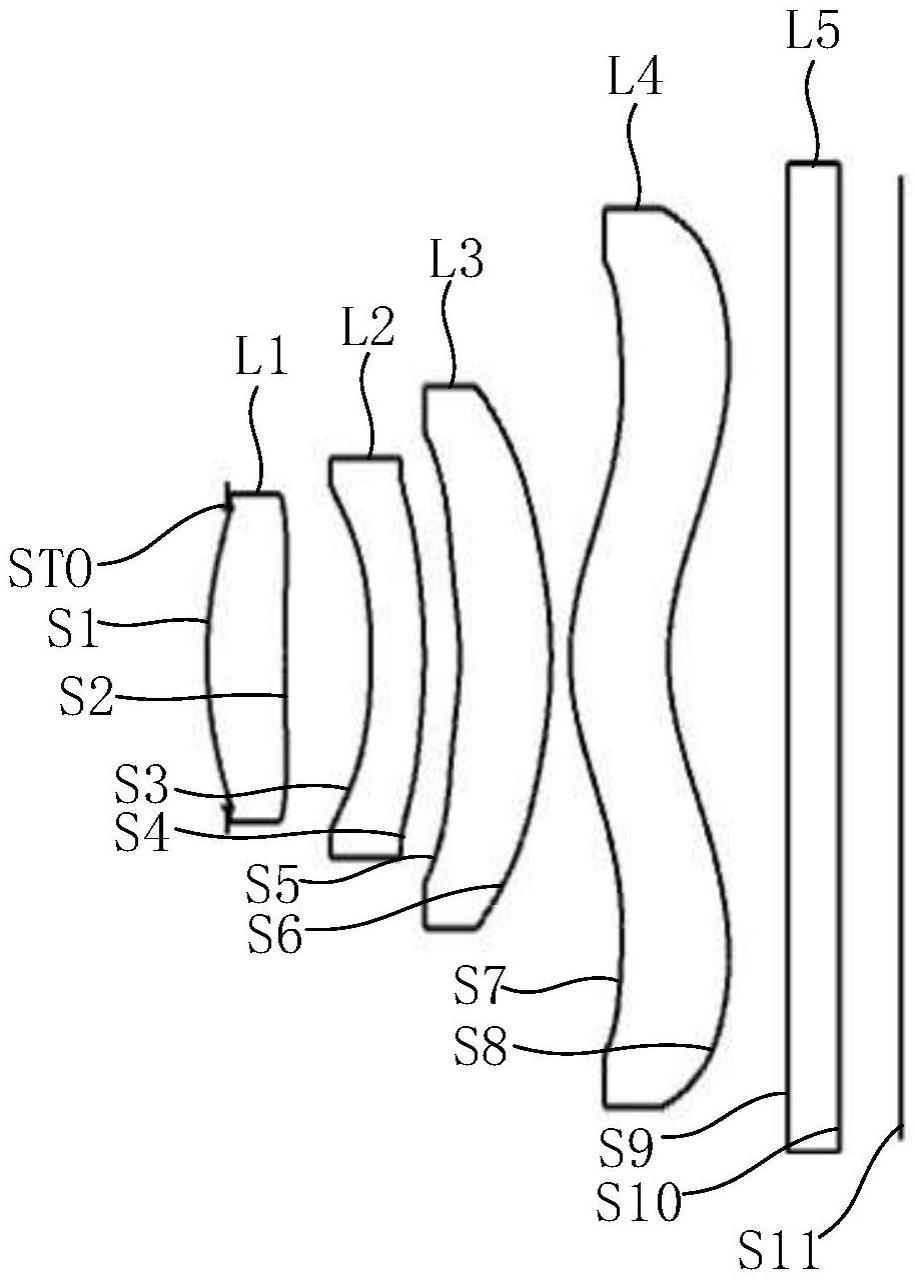
2、第一方面,本申请一实施例提供一种成像镜头,包括由物侧至像侧依次设置的第一透镜、第二透镜、第三透镜和第四透镜。第一透镜和第三透镜的光焦度为正,第二透镜和第四透镜的光焦度为负;第一透镜、第二透镜、第三透镜和第四透镜中的至少一个在x方向和y方向上的有效焦距不同,以使成像镜头在x方向和y方向上的有效焦距不同。
3、在一些实施例中,第一透镜在x方向和y方向上的有效焦距不同,第二透镜、第三透镜和第四透镜在x方向和y方向上的有效焦距相同。在其中一些实施例中,第一透镜、第二透镜、第三透镜和第四透镜满足以下条件:-5<f2/f3<-3;-3<f3/f4<-1;0.8<f1x/fx<1.5;3<f1y/fy<4.5;0.5<f1y/f1x<1.8;其中,fx为成像镜头在x方向上的有效焦距,fy为成像镜头在y方向上的有效焦距,f1x为第一透镜在x方向上的有效焦距,f1y为第一透镜在y方向上的有效焦距,f2为第二透镜的有效焦距,f3为第三透镜的有效焦距,f4为第四透镜的有效焦距。在其中一些实施例中,第一透镜为自由曲面透镜。
4、在一些实施例中,第一透镜的物侧面为凸面、像侧面为凸面;第二透镜的物侧面为凹面、像侧面为凸面;第三透镜的物侧面为凹面、像侧面在光轴处为凸面;第四透镜的物侧面在光轴处为凸面、像侧面在光轴处为凹面。在一些实施例中,成像镜头在x方向上的有效焦距小于y方向上的有效焦距。在其中一些实施例中,成像镜头在x方向上的有效焦距fx=2.85mm、y方向上的有效焦距fy=3.52mm。
5、在一些实施例中,成像镜头还包括光阑,设置在第一透镜的物侧或像侧。在一些实施例中,成像镜头还包括用于滤除背景光或杂散光的滤光片,设置在第四透镜的像侧。
6、第二方面,本申请一实施例提供一种成像模组,包括图像传感器和如第一方面所述的成像镜头,图像传感器设置在成像镜头的像侧。
7、第三方面,本申请一实施例提供一种深度相机,包括发射模组和如第二方面所述的成像模组,发射模组用于向目标发射光束,成像模组用于接收目标反射回的至少部分光束。
8、本申请提供的技术方案的有益效果:成像镜头中第一透镜、第二透镜、第三透镜和第四透镜中的至少一个在x方向和y方向上的有效焦距不同,使得成像镜头在x方向和y方向的有效焦距不同,进而成像模组在x方向和y方向上的视场角的比例与图像传感器在x方向、y方向上的比例不同,成像模组可不受图像传感器的限制,而能够实现在x方向与y方向上的视场角存在较大的差异,可以满足一些特定场景的需求。
技术特征:
1.一种成像镜头,其特征在于,包括由物侧至像侧依次设置的第一透镜、第二透镜、第三透镜和第四透镜;
2.如权利要求1所述的成像镜头,其特征在于,所述第一透镜在x方向和y方向上的有效焦距不同,所述第二透镜、所述第三透镜和所述第四透镜在x方向和y方向上的有效焦距相同。
3.如权利要求2所述的成像镜头,其特征在于,所述第一透镜、所述第二透镜、所述第三透镜和所述第四透镜满足以下条件:
4.如权利要求2所述的成像镜头,其特征在于,所述第一透镜为自由曲面透镜。
5.如权利要求1至4任一所述的成像镜头,其特征在于,所述第一透镜的物侧面为凸面、像侧面为凸面;所述第二透镜的物侧面为凹面、像侧面为凸面;所述第三透镜的物侧面为凹面、像侧面在光轴处为凸面;所述第四透镜的物侧面在光轴处为凸面、像侧面在光轴处为凹面。
6.如权利要求1所述的成像镜头,其特征在于,所述成像镜头在x方向上的有效焦距小于y方向上的有效焦距。
7.如权利要求6所述的成像镜头,其特征在于,所述成像镜头在x方向上的有效焦距fx=2.85mm,y方向上的有效焦距fy=3.52mm。
8.如权利要求1至4任一所述的成像镜头,其特征在于,所述成像镜头还包括光阑,设置在所述第一透镜的物侧或像侧;和/或
9.一种成像模组,其特征在于,包括:
10.一种深度相机,其特征在于,包括:
技术总结
本申请涉及光学成像技术领域,公开了一种成像镜头、成像模组及深度相机。成像镜头包括由物侧至像侧依次设置的第一透镜、第二透镜、第三透镜和第四透镜;第一透镜和第三透镜的光焦度为正,第二透镜和第四透镜的光焦度为负;第一透镜、第二透镜、第三透镜和第四透镜中的至少一个在X方向和Y方向上的有效焦距不同,以使成像镜头在X方向和Y方向上的有效焦距不同。本申请中,第一透镜、第二透镜、第三透镜和第四透镜中的至少一个在X方向和Y方向上的有效焦距不同,进而成像镜头在X方向和Y方向上的有效焦距不同,从而成像模组在X方向和Y方向上的视场角不同且具有较大的差异,可满足一些特定场景的应用需求。
技术研发人员:黄杰凡
受保护的技术使用者:奥比中光科技集团股份有限公司
技术研发日:20230327
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!