一种手术显微镜用超景深3D成像系统
本技术属于医疗器械,具体涉及一种手术显微镜用超景深3d成像系统。
背景技术:
1、手术显微镜是现代微创医学极为重要的实现工具,已经在医疗过程中得到了广泛的推广和应用。但是,常见的显微镜存在景深太小、只能平面观察、图像清晰度不足、局部反光无法正确观测等问题,手术显微镜属于显微镜的一种,同样面临着这些问题。常见的显微镜因其固有的特点致使景深会受到一定程度的限制,有限的景深会给医务人员观察显微样本时带来诸多不便之处,具体包括:对于高低起伏的样品,显微镜在同一个观察视野内的聚焦情况不是统一的聚焦,显微镜在观察样品时呈现出的显微图像无法拥有统一的清晰度,可能会有模糊的情况,观察人员在一个完整视野范围内不能很全面的观察和测量样本所携带的全部信息量。
2、以常见的牙科显微镜为例,其不便之处主要表现在:(1)在物镜倍数大于1.5倍的情况下,无法同时看清牙齿的顶端和底部,导致医生在实际观察中频繁调节显微镜工作高度,极大增加了手术中的工作量;(2)对于牙齿以及牙齿上的细小部位,例如牙齿上的孔洞,只能做平面显微观察,无法三维立体观察牙齿的全方位形态;(3)无法对牙齿或牙齿上的缺陷部位进行精细三维测量,因此无法定量的检测样本;(4)活体样品有轻微运动,通过显微镜放大后,在实时视频中,位移增大,显微图像合成模糊,不利于后期分析与测量。
3、因此,目前急需开发一种能够应用于各种手术显微镜,且可实现全面三维观察微观目标的手术显微镜用超景深3d成像系统,以满足日益复杂的手术显微现场要求。
技术实现思路
1、本实用新型的目的是提供一种手术显微镜用超景深3d成像系统。
2、为达到上述目的,本实用新型采用的技术方案是:
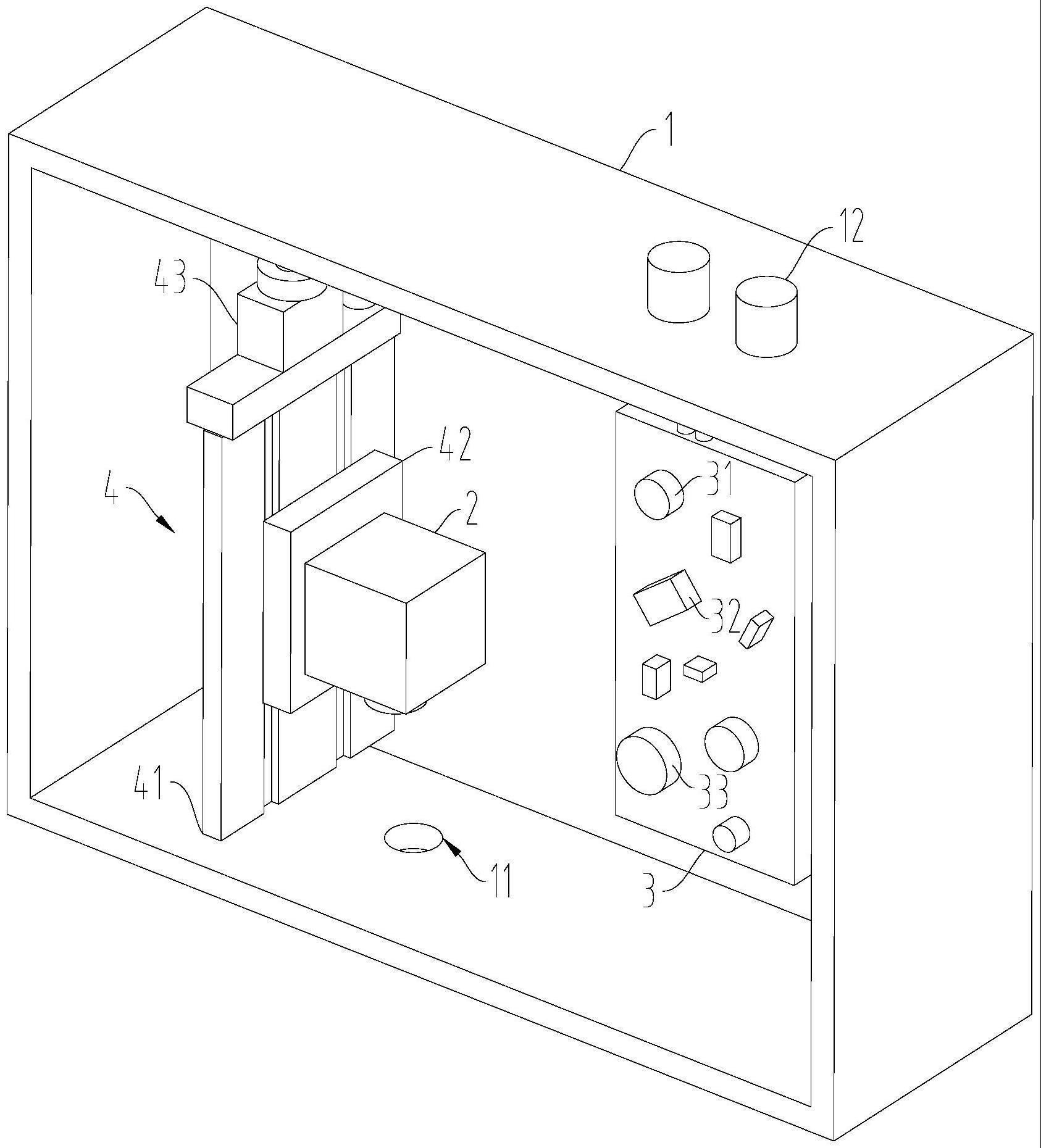
3、一种手术显微镜用超景深3d成像系统,包括:
4、壳体:所述的壳体上开设有连接口,所述的连接口用于连接显微镜的标准图像传输接口;
5、显微相机:所述的显微相机设置在所述的壳体内,且所述的显微相机可在靠近或远离所述的连接口的方向上移动;
6、控制机构:所述的控制机构设置在所述的壳体内,所述的控制机构包括运动控制模块、外触发模块以及数据转换模块,所述的运动控制模块、外触发模块以及数据转换模块分别与所述的显微相机连接,所述的运动控制模块用于控制所述的显微相机移动,所述的外触发模块用于控制所述的显微相机采集图像,所述的数据转换模块用于接收所述的显微相机采集的图像数据;
7、后台主机:所述的后台主机分别与所述的运动控制模块、外触发模块以及数据转换模块连接,所述的后台主机用于向所述的运动控制模块发出指令使其控制所述的显微相机移动、向所述的外触发模块发出指令使其控制所述的显微相机采集图像、接收所述的数据转换模块所获得的图像数据、根据所述的显微相机的位移及图像数据进行3d成像。
8、优选地,所述的成像系统还包括运动机构,所述的运动机构设置在所述的壳体内,所述的运动机构与所述的控制机构连接,所述的显微相机设置在所述的运动机构上,所述的运动机构用于驱动所述的显微相机移动。
9、进一步优选地,所述的运动机构包括导轨、滑块以及驱动件,所述的导轨设置在所述的壳体内,所述的滑块可移动地连接在所述的导轨上,所述的显微相机连接在所述的滑块上,所述的驱动件与所述的滑块连接,用于驱动所述的滑块移动。
10、更进一步优选地,所述的驱动件采用五相步进电机或者超声电机,以保证提供大扭矩和移动的平稳性。
11、更进一步优选地,所述的滑块上设置有光栅尺,所述的光栅尺与所述的控制机构连接,所述的光栅尺用于获取所述的显微相机的位移数据并发送给所述的控制机构。所述的光栅尺可防止移动过程中出现丢步的现象,并能准确记录移动的距离,确保最终3d建模与测量的准确性。
12、优选地,所述的显微相机、外触发模块支持的触发采集频率大于等于25帧。
13、优选地,所述的壳体上具有传输接头,所述的控制机构与所述的传输接头连接,所述的传输接头与所述的后台主机连接。
14、优选地,所述的显微相机具有图像芯片,所述的图像芯片采用彩色ccd芯片或者彩色cmos芯片。彩色ccd芯片和彩色cmos芯片的色彩还原度高、细节丰富,进行3d建模时可获得真彩色的样品表面纹理结构。
15、优选地,所述的后台主机采用工控机或者电脑;所述的后台主机具有3d成像模块,所述的3d成像模块用于分析所述的显微相机采集的图像数据的清晰度,并根据图像数据中清晰的部分和位移数据进行3d成像与建模。
16、进一步优选地,所述的后台主机上设置操作手柄和/或脚踏控制部件,所述的操作手柄、脚踏控制部件用于控制所述的后台主机移动和位置调整。
17、由于上述技术方案运用,本实用新型与现有技术相比具有下列优点:
18、本实用新型的手术用超景深显微3d成像系统可实现样品的非接触3d测量,解决了传统手术显微镜只能平面观察细微表观质量而无法3d微观成像的问题,能准确表述样品表面微观的3d实际数据,有利于实现定量分析,便于检测人员观察细微缺陷,同时能够捕捉低速运动的样品图像,且结构简单、操作方便、轻巧便携,适合于各类手术显微镜,实用性好。
技术特征:
1.一种手术显微镜用超景深3d成像系统,其特征在于:包括:
2.根据权利要求1所述的手术显微镜用超景深3d成像系统,其特征在于:所述的成像系统还包括运动机构,所述的运动机构设置在所述的壳体内,所述的运动机构与所述的控制机构连接,所述的显微相机设置在所述的运动机构上,所述的运动机构用于驱动所述的显微相机移动。
3.根据权利要求2所述的手术显微镜用超景深3d成像系统,其特征在于:所述的运动机构包括导轨、滑块以及驱动件,所述的导轨设置在所述的壳体内,所述的滑块可移动地连接在所述的导轨上,所述的显微相机连接在所述的滑块上,所述的驱动件与所述的滑块连接,用于驱动所述的滑块移动。
4.根据权利要求3所述的手术显微镜用超景深3d成像系统,其特征在于:所述的驱动件采用五相步进电机或者超声电机。
5.根据权利要求3所述的手术显微镜用超景深3d成像系统,其特征在于:所述的滑块上设置有光栅尺,所述的光栅尺与所述的控制机构连接,所述的光栅尺用于获取所述的显微相机的位移数据并发送给所述的控制机构。
6.根据权利要求1所述的手术显微镜用超景深3d成像系统,其特征在于:所述的显微相机、外触发模块支持的触发采集频率大于等于25帧。
7.根据权利要求1所述的手术显微镜用超景深3d成像系统,其特征在于:所述的壳体上具有传输接头,所述的控制机构与所述的传输接头连接,所述的传输接头与所述的后台主机连接。
8.根据权利要求1所述的手术显微镜用超景深3d成像系统,其特征在于:所述的显微相机具有图像芯片,所述的图像芯片采用彩色ccd芯片或者彩色cmos芯片。
9.根据权利要求1所述的手术显微镜用超景深3d成像系统,其特征在于:所述的后台主机采用工控机或者电脑;所述的后台主机具有3d成像模块,所述的3d成像模块用于分析所述的显微相机采集的图像数据的清晰度,并根据图像数据中清晰的部分和位移数据进行3d成像与建模。
10.根据权利要求1所述的手术显微镜用超景深3d成像系统,其特征在于:所述的后台主机上设置操作手柄和/或脚踏控制部件,所述的操作手柄、脚踏控制部件用于控制所述的后台主机移动和位置调整。
技术总结
本技术涉及一种手术显微镜用超景深3D成像系统,包括壳体、显微相机、控制机构及后台主机,壳体上开设有连接口,显微相机和控制机构设置在壳体内,显微相机可在靠近或远离连接口的方向上移动,控制机构包括运动控制模块、外触发模块及数据转换模块,三者分别与显微相机连接,运动控制模块和外触发模块分别用于控制显微相机移动和采集图像,数据转换模块用于接收显微相机采集的图像数据,后台主机与控制机构连接,用于向运动控制模块和外触发模块发出指令、接收数据转换模块的图像数据及进行3D成像。本技术的成像系统可实现样品的非接触3D测量,解决了传统手术显微镜只能平面观察细微表观质量的问题,能准确表述样品表面微观的3D实际数据。
技术研发人员:范启航,尚政军,范兵,孙亮
受保护的技术使用者:武汉大学
技术研发日:20230331
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!