车载环视光学系统及摄像模组的制作方法
本申请涉及光学成像领域,尤其是一种车载环视光学系统及摄像模组。
背景技术:
1、近年来,随着国家对于道路交通安全和汽车安全的要求不断提高,环视摄像头在汽车辅助驾驶系统中的应用也越来越广泛。车载环视系统就是由安装在车身前后左右的四个超广角摄像头组成,同时采集车辆四周的影像,经过图像处理后,图像最终拼接成一幅车辆四周无缝隙的360°全景俯视图,使驾驶员看清汽车四周的图像,能有效避免倒车碾压和刮蹭等事故的发生,同时环视摄像头还能识别停车通道标识、路缘和附近车辆,大大保证了汽车的行驶安全性。
2、然而,由于车载环视系统应用在户外复杂的环境中,对所搭载的广角摄像头要求极高,不仅要求视场角大,而且需要具备良好的热稳定性,即使在高低温环境下也能保持较好的解像力。目前一般的车载镜头为了追求大广角、热稳定性好,一般镜头的体积较大,成本较高,不利于市场的推广应用。
技术实现思路
1、为克服现有环视摄像头设计普遍存在热稳定性差、体积较大、成本较高的问题,本申请提供了一种车载环视光学系统,具有超宽视场角范围的同时兼备热稳定性好及成本低的特点。
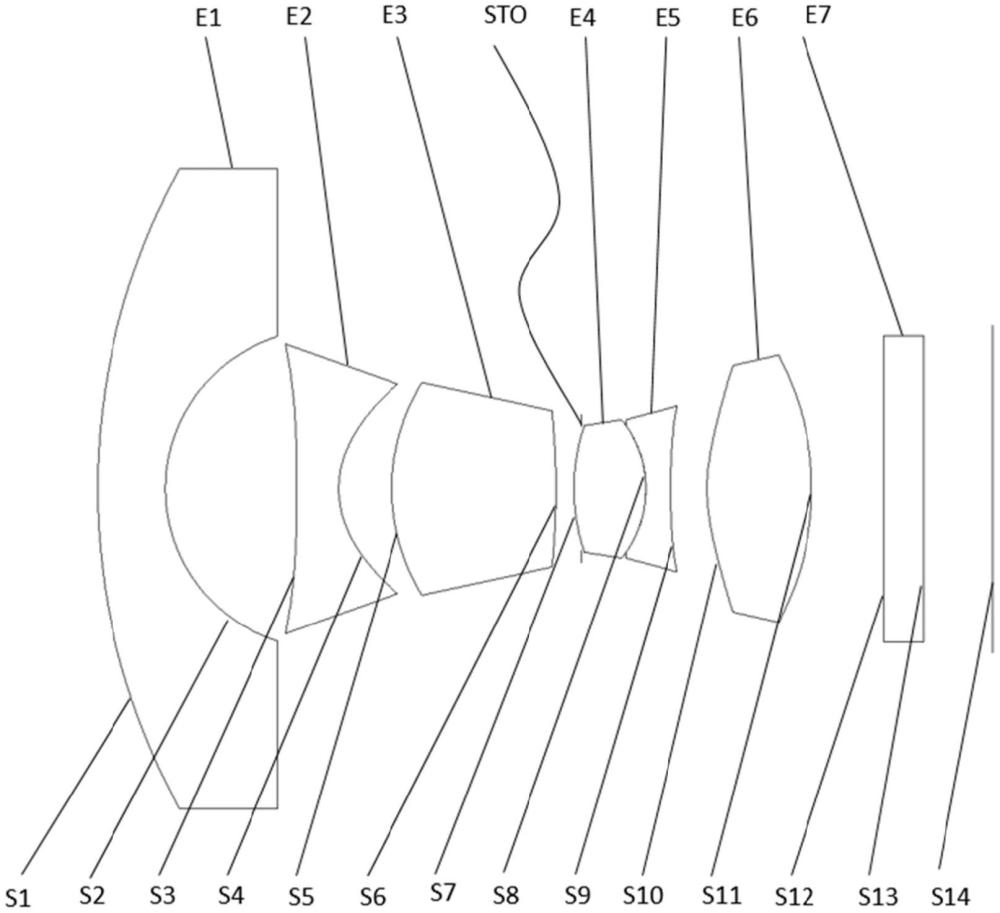
2、一种车载环视光学系统,沿光轴从物面到像面依次包括第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜;
3、所述第一透镜具有负光焦度,其物侧面为凸面,其像侧面为凹面;
4、所述第二透镜具有负光焦度,像侧面为凹面;
5、所述第三透镜具有正光焦度,其物侧面为凸面,其像侧面为凸面;
6、所述第四透镜具有光焦度,其物侧面为凸面,其像侧面为凸面;
7、所述第五透镜具有负光焦度,其物侧面为凹面,其像侧面为凹面;
8、所述第六透镜具有正光焦度,其物侧面为凸面,其像侧面为凸面;
9、该光学系统满足如下条件:186<fov/(dt11*iamgh/ttl)<198;
10、其中,fov为光学系统的最大视场角,dt11为第一透镜物侧面的最大的有效半径,ttl为第一透镜物侧面至成像面的轴上距离,imgh为成像面上有效像素区域对角线长的一半。
11、优选地,该光学系统满足如下条件:0.3<(f4-f5)/(f4+f5)<2.6;
12、1.3<f5/(f5+f6)<3.8;
13、其中,f4为第四透镜的有效焦距,f5为第五透镜的有效焦距,f6为第六透镜的有效焦距。
14、优选地,该光学系统满足如下条件:1.7<f345/f<3.0;
15、0.5<f34/f56<1.2;
16、3.0<f56/f<5.0;
17、其中,f345为第三透镜、第四透镜和第五透镜有效组合焦距,f为光学成像系统的有效焦距,f34为所述第三透镜、第四透镜的组合焦距,f56为所述第五透镜、第六透镜的组合焦距。
18、优选地,该光学系统满足如下条件:0.4<|(r1+r2)/(r2+r3)|<2.3;
19、-1<(r11+r12)/(r11-r12)<0;
20、0<|f2/r3|<1.3;
21、其中,r1为第一透镜物侧面的曲率半径,r2为第一透镜像侧面的曲率半径,r3为第二透镜物侧面的曲率半径,r11为第六透镜物侧面的曲率半径,r12为第六透镜像侧面的曲率半径,f2为第二透镜的有效焦距。
22、优选地,该光学系统满足如下条件:0.5<(sag1-sag3)/(sag1+sag3)<1.4;
23、其中,sag1为第一透镜物侧面最大有效通光孔径处至第一透镜物侧面与光轴的交点平行于光轴方向上的距离,sag3为第二透镜物侧面最大有效通光孔径处至第二透镜物侧面与光轴的交点平行于光轴方向上的距离。
24、优选地,该光学系统满足如下条件:2.0<ct6/sag11+sag12<4.5;
25、其中,ct6为所述第六透镜于光轴上的中心厚度,sag11为第六透镜物侧面最大有效通光孔径处至第六透镜物侧面与光轴的交点平行于光轴方向上的距离,sag12为第六透镜像侧面最大有效通光孔径处至第六透镜像侧面与光轴的交点平行于光轴方向上的距离。
26、优选地,该光学系统满足如下条件:0.3<dt11/sag2<2.6;
27、其中,sag2为第一透镜像侧面最大有效通光孔径处至第一透镜像侧面与光轴的交点平行于光轴方向上的距离,dt11为第一透镜物侧面的最大的有效半径。
28、优选地,该光学系统满足如下条件:所述第二透镜,第四透镜、第五透镜和第六透镜为非球面透镜,所述第一透镜和第三透镜为球面透镜;
29、光阑位于所述第三透镜与所述第四透镜之间。
30、优选地,所述光学系统的f数为2.0;
31、所述光学系统的全视场角fov满足:fov>200°;
32、所述光学系统的镜头ttl满足:ttl≤15.8mm。
33、另一方面,本申请实施例还提供一种摄像模组,至少包括光学镜头,光学镜头内安装有上述的车载环视光学系统。
34、与现有技术相比,本申请的有益效果如下:
35、本实用新型实施例之车载环视光学系统和摄像模组,沿光轴从物面到像面依次包括第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜,通过合理配置各个透镜的屈折力和面型,使得光学镜头能够具有超宽视场角范围的同时兼备热稳定性好及成本低的特点,有效减小光学系统的体积,同时还可以较好地捕获到物体细节信息,提高光学镜头捕捉拍摄物体的细节能力,改善光学镜头的画质感,提高光学镜头的分辨率和成像清晰度,以满足人们对车载环视光学镜头的高清成像要求。
技术特征:
1.一种车载环视光学系统,其特征在于:沿光轴从物面到像面包括第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜;
2.根据权利要求1所述的车载环视光学系统,其特征在于,该光学系统满足如下条件:0.3<(f4-f5)/(f4+f5)<2.6;和/或
3.根据权利要求1所述的车载环视光学系统,其特征在于,该光学系统满足如下条件:1.7<f345/f<3.0;和/或
4.根据权利要求1-3任一项所述的车载环视光学系统,其特征在于,该光学系统满足如下条件:0.4<|(r1+r2)/(r2+r3)|<2.3;和/或
5.根据权利要求1-3任一项所述的车载环视光学系统,其特征在于,该光学系统满足如下条件:0.5<(sag1-sag3)/(sag1+sag3)<1.4;
6.根据权利要求1-3任一项所述的车载环视光学系统,其特征在于,该光学系统满足如下条件:2.0<ct6/sag11+sag12<4.5;
7.根据权利要求1-3任一项所述的车载环视光学系统,其特征在于,该光学系统满足如下条件:0.3<dt11/sag2<2.6;
8.根据权利要求1-3任一项所述的车载环视光学系统,其特征在于,该光学系统满足如下条件:186<fov/(dt11*iamgh/ttl)<198;
9.根据权利要求1-3任一项所述的车载环视光学系统,其特征在于,所述光学系统的f数为2.0;和/或
10.一种摄像模组,至少包括光学镜头,其特征在于,所述光学镜头内安装有权利要求1-9任一项所述的车载环视光学系统。
技术总结
本技术公开一种车载环视光学系统及摄像模组,车载环视光学系统沿光轴从物面到像面依次包括第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜,通过合理配置各个透镜的屈折力和面型,使得光学镜头能够具有超宽视场角范围的同时兼备热稳定性好及成本低的特点,有效减小光学系统的体积,同时还可以较好地捕获到物体细节信息,提高光学镜头捕捉拍摄物体的细节能力,改善光学镜头的画质感,提高光学镜头的分辨率和成像清晰度,以满足人们对车载环视光学镜头的高清成像要求。
技术研发人员:游兴海,潘正江,赵卫平,杨林松
受保护的技术使用者:弘景光电(仙桃)科技有限公司
技术研发日:20230825
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!