一种用于机器人视觉的镜头的制作方法
本申请涉及的光学成像领域,具体而言,涉及一种用于机器人视觉的镜头。
背景技术:
1、随着工业水平持续发展及人们生活水平的不断提升,社会对自动化产品的需求越来越旺盛,大到大型产线的工业机器人,小到家用电器如扫地机器人甚至儿童玩具比比皆是,极大的提高了生产生活的便捷性。而在机器人的开发技术中,视觉镜头则是机器人不可或缺的重要环节,为机器人在前行导航、环境识别、深度感知等功能的实现起着至关重要的作用。
2、镜头是机器人视觉中的至关重要的光学组件,其架构设计及光学性能对机器人的功能实现及成本控制影响深远。现有传统功能机器人(例如扫地机器人,送饭机器人,快递分拣机器人等)通常为了控制尺寸体积及成本,采用像质分辨率较低的视觉镜头,而对像质分辨率要求较高的诸如带有深度感知、环境探测等功能的机器人,为了保证成像分辨率及探测精度,必须选用像质分辨率较高的镜头,但其架构体积大及成本高等因素又难尽如人意。
3、因此,本申请提供了一种用于机器人视觉的镜头,以解决上述技术问题之一。
技术实现思路
1、本申请的目的在于提供一种用于机器人视觉的镜头,能够解决上述提到的至少一个技术问题。具体方案如下:
2、根据本申请的具体实施方式,第一方面,本申请提供一种用于机器人视觉的镜头,包括:
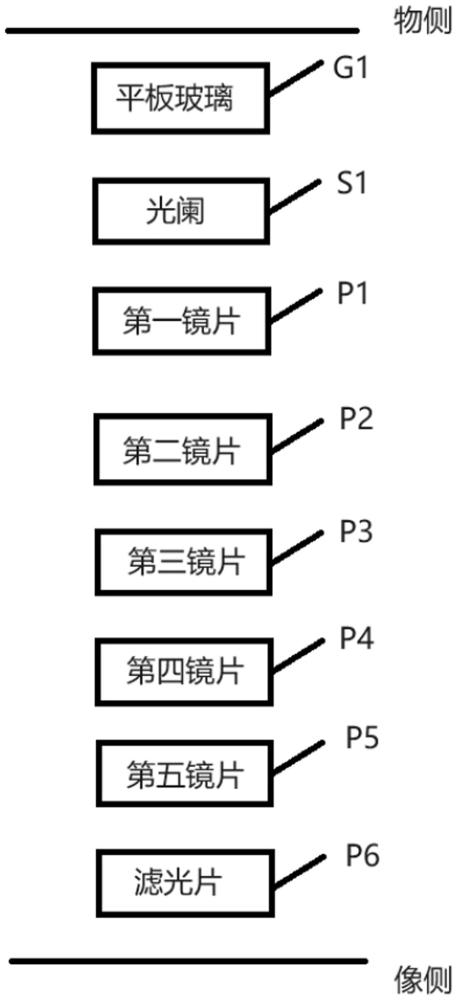
3、从物侧至像侧依次设置有平板玻璃、光阑、镜片组以及滤光片,所述镜片组包括从所述物侧至所述像侧依次的第一镜片、第二镜片、第三镜片、第四镜片、以及第五镜片;其中,所述光阑与所述平板玻璃相贴合,所述镜片组中各镜片分别为塑胶镜片,所述镜片组中各镜片分别为非球面镜片;其中,所述镜头与所述光阑满足如下约束关系:0.498≤dstop/f≤0.521;1.831≤ttl/f≤1.919;其中,f为所述镜头的总焦距,dstop为所述光阑的直径尺寸,ttl为所述镜头的总长。
4、一种实施方式中,所述镜头与所述第一镜片、以及所述第五镜片满足如下约束关系:0.042≤ds1/f≤0.053;0.837≤d5max/himg≤0.895;其中,ds1为所述光阑与所述第一镜片之间的空气间隙,d5max为所述第五镜片各表面的最大口径尺寸,himg为所述镜头的像面高度。
5、一种实施方式中,所述第一镜片、所述第二镜片、以及所述第四镜片分别具有正光焦度;所述第三镜片以及所述第五镜片分别具有负光焦度。
6、一种实施方式中,所述第一镜片、所述第二镜片、所述第三镜片、所述第四镜片、以及所述第五镜片,分别与所述镜头之间满足如下约束关系:1.61≤f1/f≤1.81;-3.85≤f2/f≤-2.89;-5.39≤f3/f≤-4.86;0.52≤f4/f≤0.86;-1.67≤f5/f≤-1.16;其中,f1为所述第一镜片的等效焦距,f2为所述第二镜片的等效焦距,f3为所述第三镜片的等效焦距,f4为所述第四镜片的等效焦距,f5为所述第五镜片的等效焦距,f为所述镜头的总焦距。
7、一种实施方式中,所述镜头的像面高度与所述镜头的焦距之间满足如下约束关系:0.787≤himg / f≤0.826;其中,himg为所述镜头的像面高度,f为所述镜头的总焦距。
8、一种实施方式中,所述镜头的背焦长度与所述镜头的总长之间满足如下约束关系:0.108≤bfl/ttl≤0.134;其中,bfl为所述镜头的背焦长度,ttl为所述镜头的总长。
9、一种实施方式中,所述平板玻璃用作衍射光学元件基底,以实现包括但不限于深度感知、特征探测的拓展应用。
10、本申请实施例的上述方案与现有技术相比,至少具有以下有益效果:
11、本申请提供了一种用于机器人视觉的镜头,从物侧至像侧依次设置有平板玻璃、光阑、镜片组以及滤光片,镜片组包括从物侧至像侧依次的第一镜片、第二镜片、第三镜片、第四镜片、以及第五镜片。其中,光阑与平板玻璃相贴合,镜片组中各镜片分别为塑胶镜片,镜片组中各镜片分别为非球面镜片。其中,光阑s1与平板玻璃g1相贴合,且光阑s1位于平板玻璃g1的后表面,用以控制进光量的大小,并在一定程度上对像差进行平衡调节。由于非球面镜片的使用,极大的缩减了镜片的使用数量,改善架构设计,节省镜片成本的同时,达成视觉镜头架构小型化目标。此外,镜头与光阑满足0.498≤dstop/f≤0.521、以及1.831≤ttl/f≤1.919的约束关系。基于上述约束,可以保证对像差的矫正、以及扩展视场,并保证在实现高分辨率成像的同时达成小型化的目标。
技术特征:
1.一种用于机器人视觉的镜头,其特征在于,包括:
2.根据权利要求1所述的用于机器人视觉的镜头,其特征在于,所述镜头与所述第一镜片、以及所述第五镜片满足如下约束关系:
3.根据权利要求1所述的用于机器人视觉的镜头,其特征在于,
4.根据权利要求1所述的用于机器人视觉的镜头,其特征在于,所述第一镜片、所述第二镜片、所述第三镜片、所述第四镜片、以及所述第五镜片,分别与所述镜头总焦距之间满足如下约束关系:
5.根据权利要求1所述的用于机器人视觉的镜头,其特征在于,所述镜头的像面高度与所述镜头的焦距之间满足如下约束关系:
6.根据权利要求1所述的用于机器人视觉的镜头,其特征在于,所述镜头的背焦长度与所述镜头的总长之间满足如下约束关系:
7.根据权利要求1所述的用于机器人视觉的镜头,其特征在于,所述平板玻璃用作衍射光学元件基底,以实现包括但不限于深度感知、特征探测的拓展应用。
技术总结
本申请提供了一种用于机器人视觉的镜头,包括:从物侧至像侧依次设置有平板玻璃、光阑、镜片组以及滤光片,镜片组包括从物侧至像侧依次的第一镜片、第二镜片、第三镜片、第四镜片、以及第五镜片;其中,光阑与平板玻璃相贴合,镜片组中各镜片分别为塑胶镜片,镜片组中各镜片分别为非球面镜片;其中,镜头满足如下约束关系:0.498≤D<subgt;stop</subgt;/f≤0.521;1.831≤TTL/f≤1.919;其中,f为镜头的总焦距,D<subgt;stop</subgt;为光阑的直径尺寸,TTL为镜头的总长。
技术研发人员:罗超,沈子程,倪一博
受保护的技术使用者:维悟光子(北京)科技有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!