一种基于BP神经网络的水下结构低频辐射噪声的主动控制方法与流程
一种基于bp神经网络的水下结构低频辐射噪声的主动控制方法
技术领域
[0001]
本发明属于噪声控制领域,具体涉及一种基于bp神经网络的水下结构低频辐射噪声的主动控制方法。
背景技术:
[0002]
声场的主动控制技术依托于惠更斯原理(即波叠加原理),已经被引入波束形成、噪声源识别定位、结构表面探伤等领域,成为当前声学领域一大研究热点。噪声的主动控制技术的基本思想是利用次级声源发声对主声源的发声有抑制作用,从而通过对声源近场域内的复声压信息进行测量,并将测量得到的复声压信息按照声场变换算法进行重构,从而实现声场中次级声源的控制进而实现整个三维辐射声场的声压控制。
[0003]
就目前成果来看,管道噪声,轴系噪声与车辆噪声的主动控制是近年的主要研究方向。由于水与空气的阻抗和物理特性等原因,对水下噪声的主动控制与空气中的控制有较大差异,此类研究成果相对较少。
技术实现要素:
[0004]
本发明提供一种基于bp神经网络的水下结构低频辐射噪声的主动控制方法,解决由于水与空气的阻抗和物理特性等原因,对水下噪声的主动控制与空气中的控制有较大差异的问题。
[0005]
本发明通过以下技术方案实现:
[0006]
一种基于bp神经网络的水下结构低频辐射噪声的主动控制方法,所述主动控制方法包括以下步骤:
[0007]
步骤1:建立水下结构低频辐射声场模型;
[0008]
步骤2:基于步骤1的模型获取待消声目标噪声声场;
[0009]
步骤3:基于步骤2的声场再根据偶极子原理和惠更斯原理在仿潜艇的圆柱壳模型结构处构建若干次级声源;
[0010]
步骤4:基于步骤3的若干次级声源,通过考察点处的声压变化,使用自适应算法对次级声源加以控制。
[0011]
进一步的,所述步骤2具体为,结合待分析的水下结构模型以及空间位置,建立噪声源模型,并进行网格划分;建立网格模型时,采用边界元软件comsol建立源面模型,并按照每个波长内不小于六个节点的规则,采用四面体单元进行网格划分。
[0012]
进一步的,所述步骤3具体为,
[0013]
设在一空间内有两点声源:主声源a与次级声源b,两者强度相同,则空间某一点a产生的声压p1与a、b产生的合声压p2有如下公式:
[0014]
[0015][0016]
其中,ρ为介质密度,c为介质中的声速,k为波数,k为波数,为相位角,q为点源强度,r1为a到叠加点m的距离,r2为b到叠加点m的距离,θ为ab中点与叠加点m的夹角;
[0017]
若要在空间内加入次级声源后声压降低,只需|p2|2/|p1|2<1,得
[0018][0019]
当距离足够远时,即r1=r2>>1时,有kdcosθ<1,只需kd<1即可,此时
[0020]
若从辐射声功率考虑,已知均匀脉动球辐射功率w1:
[0021][0022]
其中v0为脉动速度,为相位角,a为幅值,r为球心到辐射点距离,为声强对球面积分,
[0023]
得
[0024][0025]
加入次级声源构成声偶极子,则辐射功率为w2:
[0026][0027]
其中,q1为偶极子距,θ为ab中点与叠加点m的夹角;
[0028]
得
[0029][0030]
引入次级声源前后声功率变化,
[0031][0032]
当满足d<λ6时,kd<1;
[0033]
则若使w2/w1<1;
[0034]
只需(1+(ka)2)/3<1,即
[0035]
可得或即若假设结构为一规则辐射面,a为其辐射半径。
[0036]
进一步的,所述步骤4自适应算法具体为,bp神经网络是指误差的反向传播,于是参考信号滤波bp神经网络算法就分为两个阶段:前向计算和反向传播。
[0037]
进一步的,所述前向计算过程包括如下步骤:
[0038]
步骤4.0.1:参考信号x(n)及误差信号e(n)的采集;
[0039]
步骤4.0.2:基于步骤4.0.1的参考信号x(n)及误差信号e(n)计算隐层的输出信号q
j
(n);
[0040][0041]
q
j
(n)=f
j
(net
j
(n))
ꢀꢀ
(10)
[0042]
式中,f(
·
)为非线性激活函数,net
j
(n)是一个中间变量,ω
ij
为隐含权系数,i为输入层节点编号,j是隐含层节点编号,i为输入层节点个数,
[0043][0044]
式中,为激活函数(s型函数),
[0045]
步骤4.0.3:基于隐层的输出信号q
j
(n),计算输出层的输出信号u(n)
[0046][0047]
式中,j为隐含层节点个数,v
j
(n)为权值。
[0048]
进一步的,所述反向传播过程包括如下步骤:
[0049]
步骤4.1.1:代价函数j(n)为,
[0050][0051]
式中,e(n)为误差信号,y(n)为滤波器输出信号,d(n)为参考信号;
[0052]
步骤4.1.2:基于步骤4.1.1的代价函数j(n),计算权值v
j
(n)的瞬时梯度δv
j
(n);
[0053][0054]
式中,m为滤波器阶数,k为采样序号,
[0055]
当更新步长小的情况下,
[0056][0057]
则
[0058][0059]
步骤4.1.3:计算权值w
ij
(n)的瞬时梯度δw
ij
(n);
[0060][0061]
同理,当更新步长小的情况下,
[0062][0063]
则
[0064][0065]
代入化简,得
[0066][0067]
步骤4.1.4:循环迭代至误差信号e(n)满足设定要求。
[0068]
本发明的有益效果是:
[0069]
本发明实现全空间或大空间角度的辐射声压降低。对传统空气中的有源噪声控制方法加以改进,从而提高了水下噪声控制的控制效率。
附图说明
[0070]
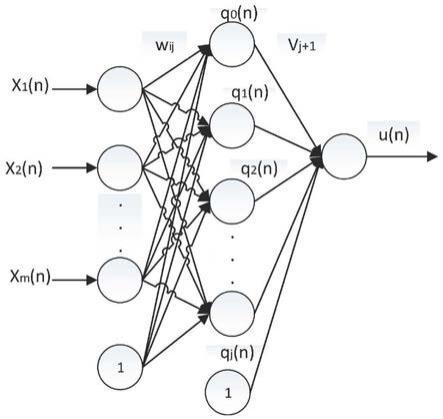
图1本发明的参考信号的神经网络模型示意图。
[0071]
图2本发明的采样率25khz,隐藏层节点数5,输入层节点数1,步长0.09考察点处的声压仿真输出示意图;其中,(a)为滤波器输出示意图,(b)为输出误差示意图,(c)为原信号频谱示意图,(d)含信号频谱示意图。
[0072]
图3本发明的50khz,隐藏层节点数15,输入层节点数3,步长0.09考察点处的声压仿真输出示意图;其中,(a)为滤波器输出示意图,(b)为输出误差示意图,(c)为原信号频谱示意图,(d)含信号频谱示意图。
[0073]
图4本发明初级源与次级源的阵元空间分布示意图;
[0074]
图5本发明0.9m处降噪前后声压级及降噪量的仿真结果;其中,(a)为0.9m处降噪前声压级,(b)为0.9m处降噪后声压级,(c)为0.9m处降噪量。
[0075]
图6本发明4.6m处降噪前后声压级及降噪量的仿真结果;其中,(a)为4.6m处降噪前声压级,(b)为4.6m处降噪后声压级,(c)为4.6m处降噪量。
[0076]
图7本发明声偶示意图。
具体实施方式
[0077]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0078]
一种基于bp神经网络的水下结构低频辐射噪声的主动控制方法,所述主动控制方法包括以下步骤:
[0079]
步骤1:建立水下结构低频辐射声场模型;
[0080]
步骤2:基于步骤1的模型获取(本发明通过comsol建模仿真得到的声场,实际中提供水听器测声压得到的声场)待消声目标噪声声场;
[0081]
步骤3:基于步骤2的声场再根据偶极子原理和惠更斯原理在仿潜艇的圆柱壳模型的结构附近构建若干次级声源;
[0082]
步骤4:基于步骤3的若干次级声源,通过考察点处的声压变化,使用自适应算法对次级声源加以控制。
[0083]
进一步的,所述步骤2具体为,结合待分析的水下结构模型以及空间位置,建立噪声源模型,并进行网格划分;建立网格模型时,采用边界元软件comsol建立源面模型,并按照每个波长内不小于六个节点的规则,采用四面体单元进行网格划分。
[0084]
进一步的,所述步骤3具体为,
[0085]
设在一空间内有两点声源:主声源a与次级声源b,两者强度相同,则空间某一点a产生的声压p1与a、b产生的合声压p2有如下公式:
[0086][0087][0088]
其中,ρ为介质密度,c为介质中的声速,k为波数,k为波数,为相位角,q为点源强度,r1为a到叠加点m的距离,r2为b到叠加点m的距离,θ为ab中点与叠加点m的夹角;
[0089]
若要在空间内加入次级声源后声压降低,只需|p2|2/|p1|2<1,得
[0090][0091]
当距离足够远时,即r1=r2>>1时,有kdcosθ<1,只需kd<1即可,此时
[0092]
若从辐射声功率考虑,已知均匀脉动球辐射功率w1:
[0093][0094]
其中v0为脉动速度,为相位角,a为幅值,r为球心到辐射点距离,为声强对球面积分,
[0095]
得
[0096][0097]
加入次级声源构成声偶极子,则辐射功率为w2:
[0098][0099]
其中,q1为偶极子距,θ为ab中点与叠加点m的夹角;
[0100]
得
[0101][0102]
引入次级声源前后声功率变化,
[0103][0104]
当满足d<λ/6时,kd<1;
[0105]
则若使w2/w1<1;
[0106]
只需(1+(ka)2)/3<1,即
[0107]
可得或即若假设结构为一规则辐射面,a为其辐射半径。由于a一般很大,故需很低的频率下有较好的效果。
[0108]
进一步的,所述步骤4自适应算法具体为,
[0109]
与传统求解系统响应函数的形式相比,运用自适应算法对系统输出进行自适应感知更简便且是符合当今的发展趋势的。对于多输入输出系统,神经网络算法计算量小、网络结构稳定等优点。本说明以bp神经网络系统为例,结构如图1。
[0110]
bp神经网络是指误差的反向传播(backpropagation),于是参考信号滤波bp神经
网络算法就分为两个阶段:前向计算和反向传播。
[0111]
进一步的,所述前向计算过程包括如下步骤:
[0112]
步骤4.0.1:参考信号x(n)及误差信号e(n)的采集;
[0113]
步骤4.0.2:基于步骤4.0.1的参考信号x(n)及误差信号e(n)计算隐层的输出信号q
j
(n);
[0114][0115]
q
j
(n)=f
j
(net
j
(n))
ꢀꢀ
(10)
[0116]
式中,f(
·
)为非线性激活函数,net
j
(n)是一个中间变量,ω
ij
为隐含权系数,i为输入层节点编号,j是隐含层节点编号,i为输入层节点个数,
[0117][0118]
式中,为激活函数(s型函数),
[0119]
步骤4.0.3:基于隐层的输出信号q
j
(n),计算输出层的输出信号u(n)
[0120][0121]
式中,j为隐含层节点个数,v
j
(n)为权值。
[0122]
进一步的,所述反向传播过程包括如下步骤:
[0123]
步骤4.1.1:代价函数j(n)为,
[0124][0125]
式中,e(n)为误差函数,y(n)滤波器输出函数,d(n)为参考信号;
[0126]
步骤4.1.2:基于步骤4.1.1的代价函数j(n),计算权值v
j
(n)的瞬时梯度δv
j
(n);
[0127][0128]
式中,m为滤波器阶数,k为采样序号,
[0129]
当更新步长小的情况下,
[0130][0131]
则
[0132][0133]
步骤4.1.3:计算权值w
ij
(n)的瞬时梯度δw
ij
(n);
[0134][0135]
同理,当更新步长小(即滤波器的权系数在一定时间内更新非常缓慢)的情况下,
[0136][0137]
则
[0138][0139]
代入化简,得
[0140][0141]
步骤4.1.4:循环迭代至误差信号e(n)满足设定要求。
[0142]
由于是对单频信号的模拟,对非线性模拟的要求不高,故只对隐藏层的传播过程使用非线性函数,进行数据变换。
[0143]
对输入80hz正弦信号为例进行matlab仿真,输出效果见图2与图3
[0144]
实施例2
[0145]
对于空间均匀六个次级点声源(布放情况如图4)消除初级点源声场,主次点源之间距离均为0.3m。使用comsol进行频率为100hz的仿真,结果如图5图6所示,分别为降噪后距主声源0.9m处与4.6m处的声压级和降噪量。
[0146]
综上,在满足上述要求后,可以使用较少的次级声源实现全空间的降噪效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1