一种声信号分离方法和系统
1.本发明属于音频处理领域,尤其涉及一种声信号分离方法和系统。
背景技术:
2.声信号识别与定位在军事、工业与农业等领域发挥着举足轻重的作用并受 到了广泛的研究,由于识别和定位需要我们能够精确获取目标的位置信息,因 此从复杂环境中进行声信号分离显得尤为重要。但是现有的声信号分离方法分 离效果较差。
技术实现要素:
3.本发明提供了一种声信号分离方法和系统,以解决现有技术中对于声信号 分离效果较差的问题。
4.一种声信号分离方法和系统,包括步骤:
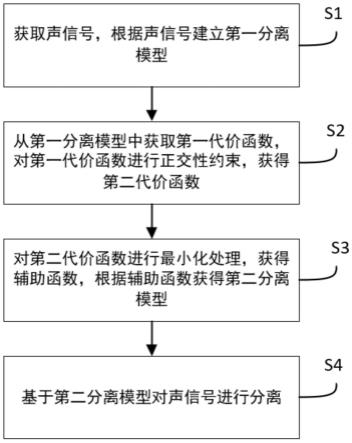
5.获取声信号,根据所述声信号建立第一分离模型;
6.根据所述第一分离模型获取第一代价函数,对所述第一代价函数进行正交 性约束,获得第二代价函数;
7.对所述第二代价函数进行最小化处理,根据最小化的第二代价函数建立第 二分离模型;
8.基于所述第二分离模型对声信号进行分离。
9.可选地,根据所述第一分离模型中获取第一代价函数的步骤包括:
10.根据所述第一分离模型获得实际观测的空间相关矩阵x
il
、估算的空间相关 矩阵实际观测的空间相关矩阵x
il
和所述估算的空间相关矩阵的数学表 达式为:
[0011][0012][0013]
其中,为声信号的信号向量,为信号向量的共轭转置向量,t
ik
为所述 估算的空间相关矩阵的列向量,v
kl
为所述估算的空间相关矩阵的行向量; h
ip
为空间特性目标矩阵;z
pk
为权重;
[0014]
获取列向量的矩阵t、行向量的矩阵v、空间特性目标矩阵h、权重的矩 阵z,并采用多通道距离来定义所述实际观测的空间相关矩阵x
il
与所述估算的 空间相关矩阵之间的近似程度,数学表达式为:
[0015][0016]
其中,t为列向量t
ik
的矩阵,v为行向量v
kl
的矩阵,h为空间特性目标矩阵 h
ip
,z为
权重z
pk
的矩阵;
[0017]
对所述数学表达式(3)采用is散度来度量,获得所述第一代价函数;所 述第一代价函数的数学表达式为:
[0018][0019]
其中m为所述声信号传播的通道数量,为实际观测的空间相关矩 阵的逆矩阵;为估算的空间相关矩阵的逆矩阵;表示实际观 测的空间相关矩阵与估算的空间相关矩阵的逆矩阵相乘的矩阵的对角元 素的和;表示信号向量的平均值;为一个多元复高斯分布, 该分布如下数学表达式:detx
il
为实际观测的空间相关矩阵x
il
的行列式, 为估算的空间相关矩阵的行列式;
[0020][0021]
可选地,对所述第一代价函数进行正交性约束,获得第二代价函数的步骤 包括:
[0022]
对所述第一代价函数中的所述矩阵t、所述矩阵v加入正交性约束,得到 所述第二代价函数,所述第二代价函数的数学表达式为:
[0023][0024]
数学表达式(6)中正则化参数λ1≥0,正则化参数λ2≥0,i为单位阵。
[0025]
可选地,对所述第二代价函数进行最小化处理,根据最小化的第二代价函 数建立第二分离模型的步骤包括:
[0026]
获取预设的辅助函数f
+
(t,v,h,z,r,u),对所述第二代价函数进行最小化处 理;
[0027]
使所述辅助函数f
+
(t,v,h,z,r,u)与最小化的第二代价函数f(t,v,h,z)相 等,获得最小化的辅助函数f
+
(t,v,h,z,r,u);
[0028]
根据最小化的辅助函数获得所述第二分离模型。
[0029]
可选地,所述辅助函数的数学表达式为:
[0030][0031]
数学表达式(7)中,r
ilp
和u
il
是满足正定性的辅助变量,hip-1
为空间特性 目标矩阵的逆矩阵;t
t
为矩阵t的转置矩阵;v
t
为矩阵v的转置矩阵;
[0032]
所述辅助函数f
+
(t,v,h,z,r,u)满足如下两个性质;
[0033]
f(t,v,h,z)≤f
+
(t,v,h,z,r,u);
[0034]
f(t,v,h,z)=min
r,u f
+
(t,v,h,z,r,u);
[0035]
其中r为辅助变量r
ilp
的矩阵,u为辅助变量u
il
的矩阵,为辅助变量矩 阵r的共轭转置矩阵;detu
il
为辅助变量矩阵u的行列式;
[0036]
当时f(t,v,h,z)=f
+
(t,v,h,z,r,u)时,辅助变量r
ilp
和辅助变量u
il
满足:
[0037][0038]
可选地,根据最小化的辅助函数获得所述第二分离模型的步骤包括:
[0039]
计算辅助函数f
+
(t,v,h,z,r,u)的偏导数,并令偏导数为0,计算式为:
[0040][0041][0042][0043][0044]
根据计算式(9)-(12)的计算结果得到正交约束多通道非负矩阵分解的 更新规则如下:
[0045][0046][0047][0048]
通过数学表达式(13)-(15)获得更新后的列向量t
ik
、行向量v
kl
和 权重z
pk
;
[0049]
对所述空间特性目标矩阵h
ip
求解黎卡提方程,求解式为:
[0050]hip
ah
ip
=b
ꢀꢀꢀ
(16)
[0051][0052]
[0053]
其中hi'
p
为更新前的空间特性目标矩阵,通过求解式(16)-(18) 获得更新后的空间特性目标矩阵h
ip
;
[0054]
将更新后的列向量t
ik
、行向量v
kl
、权重z
pk
和空间特性目标矩阵h
ip
带入 至如数学表达式(2)所述估算的空间相关矩阵中,根据更新后的估算 的空间相关矩阵获得所述第二分离模型。
[0055]
可选地,基于所述第二分离模型对声信号进行分离的步骤包括:
[0056]
基于所述第二分离模型通过维纳滤波对声信号进行分离,如果为单 通道维纳滤波,分离的声信号的数学表达式为:
[0057][0058]
如果为多通道维纳滤波,分离的声信号的数学表达式为:
[0059][0060]
其中m表示第m个通道,为一个表示频率域和时间帧的短时傅里 叶变换系数的m维复向量,是第p个分离信号的短时傅里叶变换系数 向量。
[0061]
可选地,根据所述声信号建立第一分离模型的步骤包括:
[0062]
建立瞬时混合模型,所述瞬时混合模型的数学表达式为:
[0063][0064]
数学表达式(21)中,x
il
=[x
il1
,
…
x
ilm
]
t
为m个通道的经过短时傅里叶变换的声信号, 所述声信号通过预设的观测单元获取,i=1,
…
,i,l=1,
…
,l,i为频率点数,l为频率帧 数,h
ip
=[h
ip1
,
…hipm
]
t
为频域混合滤波器,s
ilp
为源信号s
p
(t)的短时傅里叶变换;
[0065]
将其中一个通道作为参考信道,选取所述参考信道中的声信号,对声信号取非负值,计 算声信号x
il
=[x
il1
,
…
x
ilm
]
t
的幅度平方根,获得信号向量;获得信号向量的数学表达式如下:
[0066][0067]
数学表达式(22)中,sign(x
il1
)表示对声信号x
il1
取非负值,sign(x
ilm
)表示对声信号x
ilm
取非负值,信号向量
[0068]
根据所述信号向量得到实际观测的空间相关矩阵x
il
,数学表达式为:
[0069]
[0070]
数学表达式(23)中,x
il
∈cm×m,单时频点空间相关矩阵x
il
的对角线元素[x
il
]
nn
由观 测幅值|x
il
|=[|x
il1
|,
…
|x
ilm
|]
t
构成,非对角线元素[x
il
]
nm
,n≠m表示第m个观测单元和第n 个观测单元之间的相位差;
[0071]
引入空间特性矩阵h
ik
对空间相关矩阵进行估算,获得估算的空间相关矩阵的数学估算表达式为:
[0072][0073]
数学表达式(23)中,k=1,
…
,k,表示估算的空间相关矩阵的维度;h
ik
∈cm×m, 为非负矩阵中的维度所对应的源信号幅值,所述源信号幅值由非负矩阵分 离算法估计得到;
[0074]
根据所述源信号幅值得到所述第一分离模型,数学表达式为:
[0075][0076]
可选地,根据所述第一分离模型获得所述估算的空间相关矩阵的 步骤包括:
[0077]
从所述第一分离模型中获取源信号幅值
[0078]
引入空间特性目标矩阵h
ip
,根据所述源信号幅值和所述空间特性 目标矩阵h
ip
获得所述估算的空间相关矩阵
[0079]
本发明还提供一种声信号分离系统,其特征在于,包括:
[0080]
获取模块,用于获取声信号;
[0081]
运算处理模块,根据所述声信号建立第一分离模型;从所述第一分 离模型中获取第一代价函数,对所述第一代价函数进行正交性约束,获 得第二代价函数;对所述第二代价函数进行最小化处理,根据最小化的 第二代价函数建立第二分离模型;
[0082]
分离模块,用于基于所述第二分离模型对声信号进行分离。
[0083]
本发明提供一种声信号分离方法和系统,具有以下有益效果:通过 获取声信号,并根据声信号建立第一分离模型,从第一分离模型中获取 第一代价函数,并对第一代价函数进行正交性约束,对第一代价函数进 行改进并获得第二代价函数,第二代价函数的最小值的情况下获得辅助 函数,辅助函数对第一分离模型中的变量进行更新,从而获得第二分离 模型;由于在代价函数中加入了正交约束项,从而增加聚类效果,并可 以调节算法重构误差大小,因此提高了分离性能,对声信号的分离更加 准确。
附图说明
[0084]
图1是本发明一实施例中的声信号分离方法的流程示意图;
[0085]
图2是本发明一实施例中的多通道声信号时域卷积混合模型的示意图;
[0086]
图3是本发明一实施例中的直升机信号1的语谱图;
[0087]
图4是本发明一实施例中的直升机信号2的语谱图;
[0088]
图5是本发明一实施例中的混合信号的语谱图;
[0089]
图6是本发明一实施例中的分离信号1的语谱图;
[0090]
图7是本发明一实施例中的分离信号2的语谱图;
[0091]
图8是本发明一实施例中的声信号分离方法与另外两种算法的bss评测 对比图;
[0092]
图9是本发明一实施例中的声信号分离方法与另外两种算法的peass评 测对比图;
[0093]
图10是本发明一实施例中的声信号分离方法与另外两种算法的pemo-q 评测对比图。
具体实施方式
[0094]
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由 本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以 通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可 以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。 需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组 合。
[0095]
需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的 基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组 件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一 种随意的改变,且其组件布局型态也可能更为复杂。
[0096]
在下文描述中,探讨了大量细节,以提供对本发明实施例的更透彻的解 释,然而,对本领域技术人员来说,可以在没有这些具体细节的情况下实施 本发明的实施例是显而易见的。
[0097]
如图1所示,本发明中的提供的一种声信号分离方法和系统,包括步骤:
[0098]
s1.获取声信号,根据声信号建立第一分离模型;第一分离模型为非负矩阵 分离模型,即采用非负矩阵分离算法对声信号进行分离的模型;
[0099]
s2.根据第一分离模型获取第一代价函数,对第一代价函数进行正交性约 束,获得第二代价函数;通过加入正交性约束可以增加聚类效果,并可以调节 算法重构误差大小,进而提高分离性能;
[0100]
s3.对第二代价函数进行最小化处理,根据最小化的第二代价函数建立第二 分离模型;
[0101]
s4.基于第二分离模型对声信号进行分离。
[0102]
具体地,根据声信号建立第一分离模型的步骤包括:
[0103]
s101.根据声信号建立多通道声信号时域卷积混合模型,多通道声信号时域 卷积混合模型的数学表达式为:
[0104][0105]
如图2所示,数学表达式(1)为典型的多通道声信号时域卷积混合模型;其中 为由m个通道(m=1,
…
,m),p个源信号(p=1,
…
,p)混合得到的声信号, h
mp
(τ)表示第p个源信号s
p
(t)到第m个通道的空间传递函数,τ=1,...,t为时延;
[0106]
s102.获取与多通道声信号时域卷积混合模型近似的瞬时混合模型,瞬时混 合模
型的数学表达式为:
[0107][0108]
数学表达式(2)中,x
il
=[x
il1
,
…
x
ilm
]
t
为m个通道的经过短时傅里叶变换的声信号, 声信号通过预设的观测单元获取,i=1,
…
,i,l=1,
…
,l,i为频率点数,l为频率帧数, h
ip
=[h
ip1
,
…hipm
]
t
为频域混合滤波器,s
ilp
为源信号s
p
(t)的短时傅里叶变换;
[0109]
s103.将其中一个通道作为参考信道,选取参考信道中的声信号,对声信号取非负值,计 算声信号x
il
=[x
il1
,
…
x
ilm
]
t
的幅度平方根,获得信号向量,计算的数学表达式如下:
[0110][0111]
数学表达式(3)中,sign(x
il1
)表示对声信号x
il1
取非负值,sign(x
ilm
)表示对声信号 x
ilm
取非负值,信号向量
[0112]
s104.根据信号向量得到实际观测的空间相关矩阵x
il
,数学表达式为:
[0113][0114]
数学表达式(4)中,x
il
∈cm×m,单时频点空间相关矩阵x
il
的对角线元素[x
il
]
nn
由观测 幅值|x
il
|=[|x
il1
|,
…
|x
ilm
|]
t
构成,非对角线元素[x
il
]
nm
,n≠m表示第m个观测单元和第n个 观测单元之间的相位差,第m个观测单元和第n个观测单元均用于接收声信号;
[0115]
s105.引入空间特性矩阵h
ik
对空间相关矩阵进行估算,获得估算的空间相 关矩阵具体地,空间特性矩阵h
ik
为厄密特半正定矩阵,在保持声信号源 位置不变的情况下,引入空间特性矩阵h
ik
模拟在频率点i处第k个nmf基(nmf 基为非负矩阵的维度)空间特性,数学表达式为:
[0116][0117]
数学表达式(5)中,k=1,
…
,k,表示非负矩阵中的维度;h
ik
∈cm×m,为非负矩阵中的维度所对应的源信号幅值,源信号幅值由非负矩阵分离算法估计得到;
[0118]
s106.根据源信号幅值得到第一分离模型:
[0119][0120]
其中列向量t
ik
表示源信号幅度谱,与列向量t
ik
对应行向量v
kl
表示在每短 时傅里叶变换帧的增益;
[0121]
根据第一分离模型获取第一代价函数的步骤包括:
[0122]
s201.根据建立所述第一分离模型的过程获得实际观测的空间相关矩阵 x
il
、估算的空间相关矩阵
[0123]
根据列向量t
ik
和行向量v
kl
将空间相关矩阵写转换为:
[0124][0125]
引入空间特性矩阵表征声源的空间信息,得到带有列向量t
ik
、行向量v
kl
、 权重z
pk
、空间特性目标矩阵h
ip
的估算的空间相关矩阵,表示为:
[0126][0127]
其中,z
pk
为权重,z
pk
≥0,∑
lzpk
=1,z
pk
越接近1表明第k个非负矩阵的维 度(nmf基)属于第p个声源的概率越大,h
ip
为空间特性目标矩阵。
[0128]
s202.采用多通道距离来定义实际观测的空间相关矩阵x
il
与估算的空间相 关矩阵之间的近似程度,数学表达式为:
[0129][0130]
其中,t为列向量t
ik
的矩阵,v为行向量v
kl
的矩阵,h为空间特性矩阵h
ik
的简写,z为权重z
pk
的矩阵;
[0131]
s203.将数学表达式(9)采用is散度来度量,获得第一代价函数;第一代 价函数的数学表达式为:
[0132][0133]
其中为一个多元复高斯分布,该分布如下数学表达式:
[0134][0135]
本实施例中的第一分离模型采用非负矩阵分离算法,非负矩阵分离算法基 本原则是对给定矩阵与其因式分解形式之间的距离或散度进行最小化。为评估与x
il
之间近似程度,根据不同度量准则来定义代价函数,因此本实施例中采 用多通道距离和散度来度量实际观测的空间相关矩阵x
il
与估算的空间相关矩 阵之间的近似程度。
[0136]
对第一代价函数进行正交性约束,获得第二代价函数的步骤包括:
[0137]
s204.对第一代价函数中的列向量t
ik
的矩阵t、行向量v
kl
的矩阵v加入正 交性约束,得到第二代价函数,第二代价函数的数学表达式为:
[0138][0139]
数学表达式(12)中正则化参数λ1≥0,正则化参数λ2≥0,i为单位阵;
[0140]
对数学表达式(12)进行进一步优化,得到第二代价函数的优化后 的数学表达式为:
[0141][0142]
对第二代价函数进行最小化处理,根据最小化的第二代价函数建立第二分 离模型的步骤包括:
[0143]
s301.定义一个辅助函数,根据所述辅助函数获取最小化的第二代价函数;
[0144]
利用辅助函数对第二代价函数f(t,v,h,z)取最小值,辅助函数用于对第二 代价函数取最小值,因此可以看做为了实现对第二代价函数f(t,v,h,z)取最小 值的目标,设计该辅助函数;
[0145]
辅助函数的数学表达式为:
[0146][0147]
数学表达式(14)中,r
ilp
和u
il
是满足正定性的辅助变量,辅助函数f
+
满 足如下两个性质:
[0148]
f(t,v,h,z)≤f
+
(t,v,h,z,r,u);
[0149]
f(t,v,h,z)=min
r,uf+
(t,v,h,z,r,u);
[0150]
其中r为辅助变量r
ilp
的矩阵,u辅助变量u
il
的矩阵;当
[0151]
f(t,v,h,z)=f
+
(t,v,h,z,r,u)时,辅助变量r
ilp
和辅助变量u
il
满足:
[0152][0153]
s302.根据所述辅助函数获得所述第二分离模型。
[0154]
计算辅助函数f
+
的偏导数,并令偏导数为0,计算式为:
[0155][0156][0157][0158][0159]
计算偏导数的目的是为了最小化第二代价函数f(t,v,h,z),使得第二 代价函数收敛;
[0160]
根据计算式(16)-(19)的计算结果得到正交约束多通道非负矩阵分解的 更新规则如下:
[0161][0162][0163][0164]
通过数学表达式(20)-(22)获得更新后的列向量t
ik
、行向量v
kl
和权重z
pk
;
[0165]
对空间特性目标矩阵h
ip
求解黎卡提方程,求解式为:
[0166]hip
ah
ip
=b
ꢀꢀꢀ
(23)
[0167][0168][0169]
其中hi'
p
为更新前的空间特性目标矩阵,通过求解式(23)-(25) 获得更新后的空间特性目标矩阵h
ik
;
[0170]
将更新后的列向量t
ik
、行向量v
kl
、权重z
pk
和空间特性目标矩阵h
ik
带 入至估算的空间矩阵中,即根据更新后的估算 的空间矩阵获得第二分离模型。
[0171]
可选地,基于第二分离模型对声信号进行分离的步骤包括:
[0172]
基于第二分离模型通过维纳滤波对声信号进行分离,如果为单通道 维纳滤波,分离的声信号的数学表达式为:
[0173][0174]
如果为多通道维纳滤波,分离的声信号的数学表达式为:
[0175][0176]
其中m表示第m个通道,为一个表示频率域和时间帧的短时傅里 叶变换系数的m维复向量,是第p个分离信号的短时傅里叶变换系数 向量。
[0177]
具体实施效果如下:
[0178]
本实施例中,分别选取两种不同机型的直升机声信号作为声源;选 取由4个传声器(即上文中的观测单元)采集声信号,因此包括四个通 道;两个直升机声信号的采样率为4096hz。
[0179]
实验步骤如下:
[0180]
(1)采集直升机声信号1;
[0181]
(2)采集直升机声信号2;
[0182]
(3)采集直升机声信号1和直升机声信号2的混合信号;
[0183]
(4)利用本实施例中的第二分离模型对混合信号进行分离;
[0184]
实验仿真中采用的短时傅里叶变换的时间帧长设为2048ms,帧移为 1024ms,直升机信号1和直升机信号2的信号时长均为60s,nmf基的 个数为20,正则化参数λ1=7,λ2=7。
[0185]
图3直升机信号1的语谱图,图4为直升机信号2的语谱图,图5 为混合信号的语谱图;选取其中一个通道展示分离效果;图6-图7为经 过多通道稀疏正交联合约束nmf算法分离乐音信号所得的分离信号语谱 图。其中图6为经混合信号分离所得分离信号1语谱图,图7为经混合 信号分离所得分离信号2语谱图。从图中可看出分离信号1对应图6中 的源信号1,分离信号2对应图7中的源信号2,很好地实现了直升机声 信号的分离。
[0186]
图8-图10展示了四通道直升机信号的bss、peass、pemo-q评测 值的条形图。其中,bss、peass、pemo-q均为音频信号的三种评测方 式;
[0187]
图8为bss评测值,结果表明,本实施例中一种声信号分离方法 (proposed)的sir(空间偏差比)值、sar(信号伪像比)值以及sdr (信号失真比)值均显著优于其它算法,isr(空间偏差比)值略低于满 秩模型分离算法(fullrank),但优于sawada分离算法(sawada分离算 法是指文献sawada h,kameoka h,araki s,et al.multichannel extensionsof non-negative matrix factorization with complex-valued data[j].ieeetransactions on audio,speech,and language processing,2013,21(5): 971-982.记载的算法)。
[0188]
图9为peass评测值,可看出本文所提算法的ops(overallperceptual score,总体感知分数)值和tps(target-related perceptual score, 目标相关的感知分数)值均优于其它两种算法,aps(artifacts-relatedperceptual score,与伪像相关的感知分数)值比sawada分离算法高,比满 秩模型分离算法略低,ips(interference-related perceptual score,与干扰 相关的感知分数)值与满秩模型分离算法相当,比sawada分离算法小。
[0189]
图10为pemo-q评测值,从图中可看出本文所提算法的qglobal(全 局值)和qartif(伪像值)优于其它算法,qtarget(目标值)、qinterf(干 扰值)和与其它两种算法相当。
[0190]
本发明提供一种声信号分离方法,通过获取声信号,并根据声信号 建立第一分离模型,从第一分离模型中获取第一代价函数,并对第一代 价函数进行正交性约束,对第一代价函数进行改进并获得第二代价函数, 第二代价函数的最小值的情况下获得辅助函数,辅助函数对第一分离模 型中的变量进行更新,从而获得第二分离模型;针对nmf算法的分解结 果在一定程度上呈现稀疏性,但是稀疏程度难以控制的问题,研究给出 了正交约束的多通道nmf分离算法,通过在代价函数中加入了正交约束 项,从而增加聚类效果,并可以调节算法重构误差大小,提高了分离性 能。理论分析与实验验证了本专利提出的算法具有更好的分离性能。
[0191]
本发明还提供一种声信号分离系统,其特征在于,包括:
[0192]
获取模块,用于获取声信号;
[0193]
运算处理模块,根据所述声信号建立第一分离模型;从所述第一分离模 型中获取第一代价函数,对所述第一代价函数进行正交性约束,获得第二代 价函数;对所述第二代价函数进行最小化处理,根据最小化的第二代价函数 建立第二分离模型;
[0194]
分离模块,用于基于所述第二分离模型对声信号进行分离。
[0195]
本发明提供一种声信号分离系统,通过获取声信号,并根据声信号 建立第一分离模型,从第一分离模型中获取第一代价函数,并对第一代 价函数进行正交性约束,对第一代价函数进行改进并获得第二代价函数, 第二代价函数的最小值的情况下获得辅助函数,辅助函数对第一分离模 型中的变量进行更新,从而获得第二分离模型;针对nmf算法的分解结 果在一定程度上呈现稀疏性,但是稀疏程度难以控制的问题,研究给出 了正交约束的多通道nmf分离算法,通过在代价函数中加入了正交约束 项,从而增加聚类效果,并可以调节算法重构误差大小,提高了分离性 能。理论分析与实验验证了本专利提出的算法具有更好的分离性能。
[0196]
在上述实施例中,尽管已经结合了本发明的具体实施例对本发明进行了描 述,但是根据前面的描述,这些实施例的很多替换、修改和变形对本领域普通 技术人员来说将是显而易见的。本发明的实施例旨在涵盖落入所附权利要求的 宽泛范围之内的所有这样的替换、修改和变型。
[0197]
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。 任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进 行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所 揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利 要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1