钢琴联动器的组装设备的制作方法
1.本发明涉及钢琴加工设备技术领域,特别是涉及钢琴联动器的组装设备。
背景技术:
2.钢琴联动器是钢琴击弦机的重要组成部分,主要包括联动杆、勺钉、托木杆、攀带丝、顶杆轴架及联动器轴架,勺钉、托木杆及攀带丝均通过敲击固定在联动杆上(可参考中国专利号为cn201620933601.2中公开的联动器),顶杆轴架通过粘合剂粘接固定在联动杆上,联动器轴架通过轴钉转动连接在联动杆上,托木杆上固定有托木和托木毡,顶杆轴架上转动连接有顶杆。
3.现有的,相对勺钉、托木杆及攀带丝的装配,已经实现自动化机械装配,而对于联动器轴架和顶杆轴架的装配,目前依然还是由人工手动完成。通常顶杆和顶杆轴架会预先装配在一起,构成顶杆组件;在装配顶杆组件时,先将联动杆固定在对应的工装上,然后将顶杆组件放置于对应的工装内,并在顶杆轴架的末端涂上粘合剂,再将涂有粘合剂的末端装入联动杆的轴架凹槽内,人工把持柱顶杆使其保持垂直状态,防止其左右摆动,最后通过铁锤敲击顶杆组件的对应工装使其完全卡入;在装配联动器轴架时,先将联动器轴架装入联动杆的转动槽内,放置于对应的工装上,人工手动扶住使其保持水平,最后将轴钉插入轴孔并冲断钉尾。
4.由此可见的,手工操作方式存在诸多缺点:其一,粘合剂涂覆不均匀,粘接不牢靠或量多产生粘合剂挂漏;其二,手动敲击的力度不易控制,容易将联动器敲坏,不良率较高,浪费木材;其三,工艺较为繁琐复杂,生产效率低,占用人力资源多,劳动强度较大,难以工业化大批量生产;其四,联动器的各部件较小,人工不易把持,容易敲击到手部,存在安全隐患。因此,亟需解决上述问题。
技术实现要素:
5.本发明的目的就在于为了解决上述问题而提供一种钢琴联动器的组装设备。
6.本发明通过以下技术方案来实现上述目的:钢琴联动器的组装设备,包括联动杆上料装置、定位装置、点胶装置、顶杆组件装配装置、联动器轴架装配装置及下料装置;所述联动杆上料装置用于向所述定位装置逐个输送待组装的联动杆;所述点胶装置包括挤料机构和存储粘合剂的针筒,所述挤料机构用于使所述针筒的输出口向联动杆的轴架凹槽内挤入粘合剂;所述顶杆组件装配装置包括顶杆组件上料机构和第一机械手,所述顶杆组件上料机构用于向所述第一机械手逐个输送顶杆组件,所述第一机械手抓取所述顶杆组件移动至所述定位装置,并使所述顶杆组件粘接于所述定位装置的联动杆上;所述联动器轴架装配装置用于使联动器轴架装配于联动杆上,所述联动器轴架装配装置包括第二机械手和装夹联动杆的第二定位机构,所述第二机械手抓取所述定位装置上的联动杆转移至所述第二定位机构,并将所述第二定位机构上组装完成的联动器转移至所述下料装置;所述下料装置用于将组装完成的联动器进行下料。
7.进一步的,所述联动杆上料装置包括存料架、第一夹爪及第二夹爪,若干联动杆可并列码放于所述存料架上,所述第一夹爪逐个夹取所述存料架上的联动杆并摆正其姿态,所述第二夹爪夹取所述第一夹爪上的联动杆并输送给所述定位装置;在第一夹爪和第二夹爪的配合下,可将联动杆逐一的输送给定位装置,以实现联动杆的自动上料,并保证其位置的准确,提高加工效率及精度。
8.进一步的,所述定位装置包括转盘、第一驱动器及第一定位机构,所述第一驱动器传动连接所述转盘,所述转盘上周向均布四个所述第一定位机构,所述联动杆上料装置、所述点胶装置、所述顶杆组件装配装置、所述联动器轴架装配装置分别与四个所述第一定位机构一一对应设置,且沿所述转盘的转动方向依次布设,所述第一定位机构用于装夹联动杆;通过设置在转盘上的四个第一定位机构,并与四个上述加工装置一一对应,从而可让上述四个加工装置同时工作,有效提高生产效率,以实现工业大批量生产。
9.进一步的,所述顶杆组件上料机构包括第二驱动器和第一振动盘,所述第二驱动器的输出轴连接有第一推料块,所述第二驱动器驱使所述第一推料块沿直线往复运动,所述第一推料块的一侧设有与所述第一振动盘的输出口相对应的限位槽口,所述限位槽口可容纳单个顶杆组件,所述第一推料块的运动方向与所述第一振动盘的出料方向垂直设置,所述第一推料块单次运动的距离大于或等于所述限位槽口的槽宽;有效保证顶杆组件逐个上料,以实现顶杆组件的自动上料。
10.进一步的,所述第一机械手包括第一支架,所述第一支架上装设有第一直线模组,所述第一直线模组的滑块上连接有第二直线模组,所述第二直线模组与所述第一直线模组垂直设置,所述第二直线模组的滑块上连接有用于夹取顶杆组件的第一气动手指;保证能够将顶杆组件从顶杆组件上料机构处移动至定位装置上,并且可以准确的将顶杆组件组装在联动杆上,以完成顶杆组件的粘接工艺,从而实现顶杆组件的自动组装。
11.进一步的,所述联动器轴架装配装置还包括联动器轴架上料机构和轴钉插入机构,所述联动器轴架上料机构、所述轴钉插入机构分别设置于所述第二定位机构的两侧,所述联动器轴架上料机构向所述第二定位机构逐个输送联动器轴架,并使联动器轴架卡入联动杆;所述轴钉插入机构向所述第二定位机构逐个输送轴钉,并让轴钉插接于联动器轴架和联动杆之间,以使联动器轴架转动连接于联动杆上;在联动器轴架上料机构和轴钉插入机构的工作下,可实现联动器轴架自动的组装在联动杆上。
12.进一步的,所述联动器轴架上料机构包括限料块、第二振动盘、第三驱动器及第三夹爪,所述限料块上开设有相互垂直且连通的上料槽口和推料槽口,所述上料槽口与所述第二振动盘的输出口对应设置,所述推料槽口内滑动设有第二推料块,所述第三驱动器驱使所述第二推料块沿所述推料槽口往复运动,以使单个联动器轴架推向所述推料槽口的侧面,所述第三夹爪夹取所述推料槽口上的联动器轴架并输送给所述第二定位机构;有效保证联动器轴架逐个向第二定位机构输送,以实现联动器轴架的自动上料。
13.进一步的,所述轴钉插入机构包括轴钉匣、第三振动盘及第四驱动器,若干轴钉可并列码放于所述轴钉匣内,所述轴钉匣上设有与所述第三振动盘的输出口对应设置的入料口,所述轴钉匣的底端贯穿有出料孔,所述出料孔的开设方向与所述轴钉匣内码放的轴钉延长方向平行设置,所述出料孔的一端与所述第二定位机构对应设置,所述出料孔的另一端与所述第四驱动器对应设置;所述第四驱动器的输出端连接有推料轴,所述第四驱动器
驱使所述推料轴沿所述出料孔往复滑动,以使单个轴钉输送给所述第二定位机构;有效保证轴钉逐个向第二定位机构输送,并让轴钉插接在正确位置上,从而让联动器轴架转动连接在联动杆上,以实现联动器轴架的自动组装。
14.进一步的,所述第二机械手包括第二支架,所述第二支架上装设有第三直线模组,所述第三直线模组的滑块上连接有第四直线模组及第五直线模组,所述第四直线模组与所述第三直线模组垂直设置,所述第四直线模组的滑块上连接有第二气动手指,所述第二气动手指用于夹取定位装置上的联动杆;所述第五直线模组与所述第四直线模组平行设置,所述第五直线模组的滑块上连接有第三气动手指,所述第三气动手指用于夹取第二定位机构上的联动杆;保证能够将第一定位机构上的联动杆准确的移动至第二定位机构上,同时也保证第二定位机构上组装完成的联动杆能够快速的移动到下料装置,从而实现联动杆在各个工装之间的快速转移以及快速下料,有效提高生产效率。
15.进一步的,还包括分别与所述联动杆上料装置、所述定位装置、所述点胶装置、所述顶杆组件装配装置、所述联动器轴架装配装置及所述下料装置信号连接的控制器;在控制器的协调控制下,保证各个加工装置能够协同工作,有效降低生产事故,提高加工效率。
16.本发明的有益效果在于:通过联动杆上料装置、定位装置、点胶装置、顶杆组件装配装置、联动器轴架装配装置及下料装置,可实现联动杆的自动上料、定位及夹紧,向联动杆自动点胶,顶杆组件的自动上料及组装,联动器轴架的自动上料及组装,并且将组装完成的联动器自动下料,整个加工过程全部是自动化生产,极大的减少人工的介入,有效替代人工,减轻人工的劳动强度,提高生产效率,已实现工业大批量自动化生产;而且通过机械的精准控制,可有效保证粘合剂涂覆的相对均匀,使得顶杆组件粘接的更加牢靠,同时也可以让敲击的力度够保持一致,有效降低联动器的不良率,让木材能够合理的被利用;再者,人工只需将联动器的各个较小的部件,对应放入上料机构,本设备便可自动的输出组装完成的联动器,不再需要人工去敲击,也不会敲击到手部,有效杜绝相应的安全隐患,保证人工的人身安全;总体而言,本发明解决了现有技术中的技术问题,有效替代人工操作,实现联动器组装工序的机械自动化,提高装配质量的稳定性,减轻人工的劳动强度,减少人力成本,并且具备操作方便、加工精度高、加工效率高以及自动化程度高的优点。
附图说明
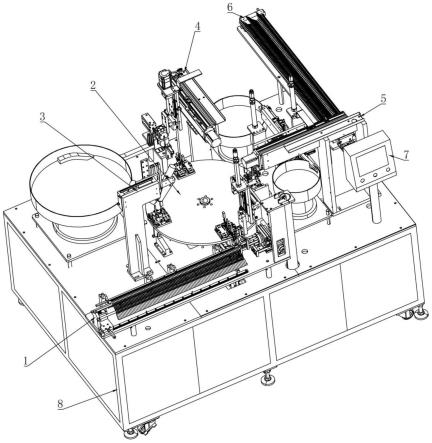
17.图1是本发明的整体结构示意图;
18.图2是本发明中联动杆上料装置的结构示意图;
19.图3是本发明中定位装置的结构示意图;
20.图4是本发明中点胶装置的结构示意图;
21.图5是本发明中顶杆组件装配装置的结构示意图;
22.图6是本发明中联动器轴架装配装置的结构示意图;
23.图7是本发明中下料装置的结构示意图;
24.图8是本发明中顶杆组件上料机构的局部放大示意图;
25.图9是本发明中第一气动手指结构示意图;
26.图10是本发明中限料块的结构示意图;
27.图11是本发明中轴钉匣的结构示意图;
28.图12是本发明中联动器的加工过程示意图。
29.附图标记说明如下:
30.1-联动杆上料装置;11-存料架;111-固定板;112-支撑块;113-第一滑杆; 114-压杆;12-第一夹爪;121-第四气缸;122-第五气缸;123-第一旋转气缸; 124-第四气动手指;13-第二夹爪;131-第三支架;132-第一无杆气缸;133-第六气缸;134-第五气动手指;135-第一滑板;136-第二滑轨;137-第二滑块; 14-推料机构;141-第一滑轨;142-第一滑块;143-第一气缸;144-推板;145
‑ꢀ
绳索;146-重物;147-定滑轮;148-第二气缸;149-挡板;15-压料机构;151
‑ꢀ
第三气缸;152-压块;153-靠板;
31.2-定位装置;21-转盘;22-第一驱动器;23-第一定位机构;231-底板;232
‑ꢀ
第五驱动器;2321-滚轮;2322-第八气缸;2323-凹槽块;2324-引导坡;233
‑ꢀ
第一定位块;234-第二定位块;235-第三定位块;236-第一夹紧块;237-第二夹紧块;24-开模机构;241-推杆;242-第六驱动器;243-推料楔块;25-顶料机构;251-第五支架;252-第九气缸;
32.3-点胶装置;31-胶筒;32-第四支架;33-第二无杆气缸;34-第七气缸;
33.4-顶杆组件装配装置;41-顶杆组件上料机构;411-第二驱动器;412-第一振动盘;413-第一推料块;4131-限位槽口;414-安装板;415-第三滑轨;416
‑ꢀ
导向板;417-限位块;418-定位板;419-第十气缸;42-第一机械手;421-第一支架;422-第一直线模组;423-第二直线模组;424-第一气动手指;425-夹块; 4251-夹紧槽口;426-对中块;4261-对中槽口;
34.5-联动器轴架装配装置;51-第二机械手;511-第二支架;512-第三直线模组;513-第四直线模组;514-第五直线模组;515-第二气动手指;516-第三气动手指;517-第二滑板;518-第二旋转气缸;52-第二定位机构;521-装配板; 522-顶料气缸;53-联动器轴架上料机构;531-限料块;5311-上料槽口;5312
‑ꢀ
推料槽口;532-第二振动盘;533-第三驱动器;534-第三夹爪;535-第二推料块;536-第六支架;537-第十一气缸;538-第十二气缸;539-第六气动手指; 54-轴钉插入机构;541-轴钉匣;5411-入料口;5412-出料孔;5413-堆料腔; 542-第三振动盘;543-第四驱动器;544-推料轴;55-断轴机构;551-切断刀; 552-第七驱动器;553-连接块;554-第三滑块;555-第四滑轨;
35.6-下料装置;61-下料架;62-第二滑杆;63-下料气缸;64-挡料块;
36.7-控制器;8-机架;
37.a-联动杆;a1-轴架凹槽;a2-上基准面;a3-转动槽;b-顶杆组件;b1-顶杆;b2-顶杆轴架;c-联动器轴架;d-轴钉。
具体实施方式
38.为了便于理解本发明,下面结合附图和具体实施方式,对本发明进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“上”、“下”、“左”、“右”、“内”、“外”以及类似的表述只是为了说明的目的。
39.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本说明书中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是用于限制本发明。本说明书所使用的术语“和/或”包括
一个或多个相关的所列项目的任意的和所有的组合。
40.参考图1至图12所示,本实施例提供钢琴联动器的组装设备,包括联动杆上料装置1、定位装置2、点胶装置3、顶杆组件装配装置4、联动器轴架装配装置5及下料装置6;联动杆上料装置1用于向定位装置2逐个输送待组装的联动杆a;点胶装置3包括挤料机构和存储粘合剂的针筒31,挤料机构用于使针筒31的输出口向联动杆a的轴架凹槽a1内挤入粘合剂;顶杆组件装配装置4 包括顶杆组件上料机构41和第一机械手42,顶杆组件上料机构41用于向第一机械手42逐个输送顶杆组件b,第一机械手42抓取顶杆组件b移动至定位装置 2,并使顶杆组件b粘接于定位装置2的联动杆a上;联动器轴架装配装置5用于使联动器轴架c装配于联动杆a上,联动器轴架装配装置5包括第二机械手 51和装夹联动杆a的第二定位机构52,第二机械手51抓取定位装置2上的联动杆a转移至第二定位机构52,并将第二定位机构52上组装完成的联动器转移至下料装置6;下料装置6用于将组装完成的联动器进行下料。本组装设备还包括控制器7和机架8,联动杆上料装置1、定位装置2、点胶装置3、顶杆组件装配装置4、联动器轴架装配装置5及下料装置6均与控制器7信号连接,且都安装在机架8上;机架8的底部设有脚撑和万向轮,方便整台设备的固定和移动,机架8内整合有气动系统和电控系统。控制器7可控制整台设备的协同工作,具有可操作的部件(触摸屏、按键等),也可设置报警器(喇叭、蜂鸣器等)。值得一提的是,本设备上还设有接口,以供前工序加工的工件输入,即可对应连接勺钉、托木杆及攀带丝的自动化设备(参考中国专利号为 cn202122394045.x、cn202122394016.3及cn202122819066.1公开的设备),进而可实现联动器一体化装配。
41.参考图2所示,联动杆上料装置1包括存料架11、第一夹爪12及第二夹爪 13,若干联动杆a可并列码放于存料架11上,第一夹爪12逐个夹取存料架11 上的联动杆a并摆正其姿态,第二夹爪13夹取第一夹爪12上的联动杆a并输送给定位装置2。
42.优选地,存料架11包括固定板111,固定板111的两端分别设有支撑块112,支撑块112之间连接有至少三根平行设置的第一滑杆113,可以使得联动杆a并列码放,相当于让联动杆a“趴”在第一滑杆113上,固定板111上转动连接有压杆114,压杆114与第一滑杆113的延长方向平行设置。存料架11上设有推料机构14,推料机构14包括固设在固定板111上的第一滑轨141,第一滑轨141 与第一滑杆113的延长方向平行设置,第一滑轨141上滑动配合有第一滑块142,第一滑块142上装设第一气缸143,第一气缸143的输出端固设有推板144,第一滑块142通过绳索145连接有重物146,绳索145通过两个定滑轮147绕设在第一滑杆113的出料端,通过定滑轮147改变力的作用方向,让结构更加紧凑,方便安装;第一滑杆113的出料端设置有第二气缸148,第二气缸148的输出端固定有挡板149。第一滑杆113的出料端还设有压料机构15,压料机构15包括第三气缸151,第三气缸151的输出端固设有压块152,固定板111上设有与压块152相对设置的靠板153,靠板153和压块152之间预留有供联动杆a通过的空隙。第一夹爪12与第一滑杆113的出料端对应设置,第一夹爪12包括从下至上依次设置的第四气缸121、第五气缸122及第一旋转气缸123,第一旋转气缸123的输出端装设有第四气动手指124。第二夹爪13包括第三支架131,第三支架131固设在固定板111上,且与第一滑杆113的出料端对应设置,两个定滑轮147分布在第三支架131的上下两端,第三支架131上设有第一无杆气缸132,第一无杆气缸132的滑块上设有第六气缸133,第六气缸133的输出轴上连接有第五气动手指134,第五气动手指134与第四气动手指124对应设置。
43.具体的,第一无杆气缸132的滑块上固设有第一滑板135,第一滑板135上固设有第二滑轨136,第二滑轨136的延长方向与第六气缸133的轴向平行设置,第六气缸133的输出端通过第二滑块137与第五气动手指134连接,第二滑块 137与第六气缸133的输出端固接,第二滑块137与第二滑轨136滑动配合。
44.联动杆上料装置1在实际工作时,初始状态下,第一滑杆113上并列码满若干联动杆a,压杆114将整排联动杆a压住,第一气缸143的输出端伸出,让推板144向上升起,第二气缸148的输出端也伸出,让挡板149升起;在重物 146的重力下,绳索145拉动第一滑块142,使得推板144抵靠在整排联动杆a 的一侧,同时让整排联动杆a的另一侧抵靠在挡板149上,让整排联动杆a始终具有向第一滑杆113的出料端运动的趋势;当联动杆a需要上料时,第一夹爪12工作,第四气缸121伸出,让第四气动手指124靠近第一滑杆113的出料端;随后第三气缸151伸出,使得压块152将第一滑杆113出料端的倒数第二个联动杆a相对靠板153固定住,从而让倒数第二个联动杆a开始均被限制住;第二气缸148的输出端缩回,挡板149下降,同时第四气动手指124将第一滑杆113出料端最外边的联动杆a夹住;紧接着第四气缸121缩回,第一旋转气缸123动作,将联动杆a的位置摆正,第二夹爪13工作,第五气动手指134将摆正后的联动杆a夹住,第一无杆气缸132和第六气缸133动作,此时第五气缸122会工作,让第四气动手指124远离第五气动手指134,以避让联动杆a,防止撞到将其损坏;将摆正后的联动杆a移动至对应的第一定位机构23上后,第五气动手指134松开,第二夹爪13回复原位,同时第三气缸151缩回,第二气缸148再次伸出,倒数第二个联动杆a被松开后,在重物146的重力下,推板144让整排联动杆a向第一滑杆113的出料端推进,倒数第二个联动杆a抵靠在挡板149上,成为最外边的联动杆a,第一夹爪13也会回复原位,等待下一个联动杆a的上料,如此循环上述动作,便可将存料架11上的联动杆a逐个输送给定位装置2。值得一提的是,可转动压杆114,将并列码放在第一滑杆113 上的联动杆a压住,避免倾倒或掉落的可能,保证上料的稳定可靠也可以随时翻开压杆114;也可以扳开推板144,以增加联动杆a的数量,或调整联动杆a 的位置,在重物146的作用力以及绳索145的连接作用下,会自动的将整排联动杆a推向挡板149上,保证联动杆a补料及上料方便。
45.参考图4所示,点胶装置3优选采用型号为得力马-983a的真空点胶机,挤料机构包括第四支架32,第四支架32上设有第二无杆气缸33,第二无杆气缸 33的滑块上设有第七气缸34,第七气缸34的输出轴上连接有两个针筒31,两个针筒31的针尖分别与联动杆a上两侧的轴架凹槽a1相对应。当联动杆a需要点胶时,第二无杆气缸33和第七气缸34均伸出,使得针筒31的针尖移动到轴架凹槽a1处(即点胶位),随后将针筒31内的粘合剂挤出,从而完成点胶,点胶装置3再回复原位,等待下一个联动杆a的点胶。
46.参考图3所示,定位装置2包括转盘21、第一驱动器22及第一定位机构23,第一驱动器22传动连接转盘21,转盘21上周向均布四个第一定位机构23,联动杆上料装置1、点胶装置3、顶杆组件装配装置4、联动器轴架装配装置5 分别与四个第一定位机构23一一对应设置(依次对应的为上料工位、点胶工位、顶杆组件装配工位、移料工位),且沿转盘21的转动方向依次布设,第一定位机构23用于装夹联动杆a。优选地,第一驱动器22采用分度器。
47.具体的,第一定位机构23包括底板231和第五驱动器232,底板231上固设有第一定位块233和第二定位块234,第一定位块233设置于第二定位块234 的一端,第一定位块233上设有通过螺钉连接的调节块,使之更好的适应联动杆a,提高定位精度;第二定位块234的
两侧分别设有第三定位块235和第一夹紧块236,第三定位块235和第一夹紧块236均滑动连接于底板231上,第三定位块235呈“7”字型;底板231上设有驱使第三定位块235抵靠于第二定位块 234上的第一弹性件,底板231上设有驱使第一夹紧块236靠近第二定位块234 的第二弹性件;底板231的底部滑动设有第二夹紧块237,底板231开设有供第二夹紧块237的上端穿过的避让孔,底板231上设有驱使第二夹紧块237靠近第三定位块235的第三弹性件。
48.转盘21的下方设有与第一定位机构23相对设置的开模机构24,开模机构 24用于驱使第三定位块235远离第二定位块234,从而打开第一定位机构23,可以将联动杆a置入或取下。开模机构24包括推杆241和安装在机架8上的第六驱动器242,推杆241与第三定位块235固接,第六驱动器242的输出端固接有推料楔块243,推料楔块243与推杆241相对设置。第六驱动器242优选采用标准气缸;联动杆上料装置1和联动器轴架装配装置5旁侧分别设有开模机构 24。当第一定位机构23需要打开时,转盘21在第一驱动器22的带动下,第一定位机构23移动到对应工位处,开模机构24动作,第六驱动器242工作,使推料楔块243靠近推杆241,并将其推动,让第三定位块235克服第一弹性件的弹力,第三定位块235远离第二定位块234,从而将第一定位机构23打开;反之,第六驱动器242回复原位,第一弹性件会使第三定位块235同样回复原位。
49.第五驱动器232用于驱使第二夹紧块237远离或靠近第三定位块235,在第五驱动器232驱使第二夹紧块237靠近第三定位块235时,联动杆a的上基准面a2抵靠在第三定位块235上,从而让联动杆a完全定位,此时开模机构24 不会工作,让第一定位机构23保持关闭;反之,第五驱动器232驱使第二夹紧块237远离第三定位块235时,不对联动杆a进行完全定位,同时开模机构24 会工作,将第一定位机构23打开,便于取下联动杆a;通过第五驱动器232使得联动杆a以上基准平面定位,定位更加准确可靠,提高生产质量。具体的,第五驱动器232包括滚轮2321和安装在机架8上的第八气缸2322,滚轮2321 转动连接在第二夹紧块237的下端,第八气缸2322的输出端固接有凹槽块2323,凹槽块2323可与滚轮2321卡接。在联动杆上料装置1、点胶装置3、顶杆组件装配装置4及联动器轴架装配装置5的旁侧均分别一一对应设置第五驱动器 232。值得一提的是,为了控制方便,以及定位准确,设置在点胶装置3和顶杆组件装配装置4旁侧的第五驱动器232不完全采用上述结构,第八气缸2322和凹槽块2323通过一引导坡2324替换,引导坡2324的高度沿转盘21的切线方向逐渐升高,引导坡2324将滚轮2321引导至最高时,第二夹紧块237靠近第三定位块235,联动杆a的上基准面a2抵靠在第二定位块234上,并将其夹紧固定,滚轮2321经过引导坡2324的最高位后,第三弹性件会让第二夹紧块237 回复原位;使得此处对应的两个第五驱动器232只能让第二夹紧块237靠近第三定位块235,以将联动杆a完全被定位夹紧在第一定位机构23内;然而设置在联动杆上料装置1和联动器轴架装配装置5旁侧的第五驱动器232只设置向下的工作行程,即让第二夹紧块237远离第三定位块235,联动杆a无需定位,方便将其取走。
50.转盘21的外侧设有顶料机构25,顶料机构25设置在点胶装置3的旁侧,顶料机构25包括第五支架251,第五支架251上设有第九气缸252,第九气缸 252的输出轴与第一夹紧块236和第二定位块234之间的空隙相对应(此空隙就是用于装夹联动杆a的空间)。顶料机构25在工作时,第九气缸252输出轴伸出,以顶到第一定位机构23上的联动杆a,让联动杆a的一端抵靠在第一定位块233的调节块上,保证其定位准确,随后回复原位,等待下一个联动杆a的定位。
51.定位装置2在实际工作时,以其中一个第一定位机构23为例,第一定位机构23处于上料工位,开模机构24工作,让第三定位块235远离第二定位块234,打开第一定位机构23,同时第五驱动器232也会工作,凹槽块2323与滚轮2321 卡接,第八气缸2322动作向下拉动第二夹紧块237,以远离第三定位块235,联动杆上料装置1工作,第五气动手指134将联动杆a放置在第一夹紧块236 和第二定位块234之间,联动杆上料装置1回复原位,随后开模机构24回复原位,由于第三定位块235呈“7”字型,能够牢靠的将联动杆a“抱”住,第一夹紧块236在第二弹性件的弹力作用下,使得联动杆a两侧面分别对应抵靠在第一夹紧块236和第二定位块234,有效将联动杆a夹住,第五驱动器232也会回复原位;紧接着第一驱动器22驱使转盘21转动90度,第一定位机构23到达点胶工位处,同时在下方的引导坡2324的作用下,将联动杆a的上基准面a2 抵靠在第三定位块235,然后顶料机构25会先动作,推一下联动杆a,以使联动杆a的端面抵靠在第一定位块233的调节块,点胶装置3再工作,完成点胶后回复原位;紧接着第一驱动器22又驱使转盘21转动90度,第一定位机构23 到达顶杆组件装配工位处,同时在下方的引导坡2324的作用下,将联动杆a的上基准面a2抵靠在第三定位块235,顶杆组件装配装置4工作,第一气动手指 424将顶杆组件b组装在联动杆a上后,顶杆组件装配装置4回复原位;紧接着第一驱动器22再次驱使转盘21转动90度,第一定位机构23到达移料工位处,开模机构24工作,打开第一定位机构23,同时此处的第五驱动器232也会工作,凹槽块2323与滚轮2321卡接,第八气缸2322动作向下拉动第二夹紧块237,以远离第三定位块235,第二机械手51工作,第二气动手指515夹取顶杆组件 b组装完成的联动杆a,并移动到第二定位机构52上,联动器轴架装配装置5 工作,以完成后面的组装工序,同时第一驱动器22又驱使转盘21转动90度,第一定位机构23回复到上料工位,进行下一组装循环。需要说明的是,第一驱动器22每动作一次,便带动转盘21转动90度,转盘21上的四个第一定位机构23均移动一个工位的距离,随后四个相对应的加工装置同时工作,而第一定位机构23相对应的打开或关闭,以便于联动杆a向定位装置2上/下料、联动杆a的点胶以及顶杆组件b的组装,极大的提高加工效率。
52.参考图5所示,顶杆组件上料机构41包括第二驱动器411和第一振动盘412,第二驱动器411的输出轴连接有第一推料块413,第二驱动器411驱使第一推料块413沿直线往复运动,第一推料块413的一侧设有与第一振动盘412的输出口相对应的限位槽口4131,限位槽口4131可容纳单个顶杆组件b,第一推料块 413的运动方向与第一振动盘412的出料方向垂直设置,第一推料块413单次运动的距离大于或等于限位槽口4131的槽宽。
53.参考图8所示,顶杆组件上料机构41还包括安装板414,安装板414上固设有第三滑轨415,第一推料块413滑动设置在第三滑轨415上,第二驱动器411固设在安装板414上,第二驱动器411采用标准气缸,且第二驱动器411的输出轴延长方向与第三滑轨415的延长方向平行设置。安装板414上设有两个对称的导向板416,两个导向板416间隔设置,该间隔呈喇叭口状,且与第一振动盘412的输出口对应设置,方便将顶杆组件b引导至限位槽口4131。第一推料块413上固设有限位块417和定位板418,定位板418和限位块417分别设置在限位槽口4131的两侧边,定位板418与顶杆b1的高度相对应,定位板418 和限位块417之间的间隔与顶杆b1的宽度相对应。安装板414上还设有第十气缸419,第十气缸419的输出轴与定位板418相对应。
54.第一机械手42包括第一支架421,第一支架421上装设有第一直线模组422,第一直
线模组422的滑块上连接有第二直线模组423,第二直线模组423与第一直线模组422垂直设置,第二直线模组423的滑块上连接有用于夹取顶杆组件b 的第一气动手指424。
55.参考图9所示,第一气动手指424的两个手指上分别连接有夹块425,两个夹块425相对的那个平面(即是夹紧面)下端分别开设有夹紧槽口4251,使得第一气动手指424在夹取顶杆组件b时,两个夹块425相对的那个平面将顶杆 b1夹住,夹紧槽口4251的底面将顶杆轴架b2夹住,使顶杆组件b完全被夹住,避免顶杆b1相对顶杆轴架b2转动;第一气动手指424上设有对中块426,对中块426上开设有对中槽口4261,对中槽口4261朝向两个手指设置,且与第十气缸419的输出轴对应设置,用于供顶杆b1的上端卡入,以使其对中,保证其处于竖直状态,防止左右摆动,提高定位精度,保证装配质量。
56.顶杆组件装配装置4在实际工作时,第一振动盘412工作,持续向第一推料块413输送顶杆组件b,第二驱动器411驱使第一推料块413沿第三滑轨415 往复滑动,由于限位槽口4131只能容纳单个顶杆组件b,每动作一次,便推出一个顶杆组件b;由于第二驱动器411的输出口与限位槽口4131对应设置,且在导向板416的引导作用下,顶杆b1会卡在定位板418和限位块417之间,顶杆轴架b2卡在限位槽口4131内,保证每次推出的顶杆组件b2的位置均处于正确位置;随后第十气缸419动作,推动顶杆b1,顶杆b1卡在对中槽口4261内,保证顶杆b1抵靠在定位板418上,保证位置的正确;紧接着,第一机械手42 动作,第一直线模组422配合第二直线模组423,让第一气动手指424到达第一推料块413推出的位置处,将顶杆组件b夹住,然后将其移动至对应的第一定位机构23处,第二直线模组423下降,让顶杆轴架b2卡在联动杆a上(此时联动杆a的轴架凹槽a1内已点入粘合剂),从而完成顶杆组件b的装配;第一机械手42回复原位,等待下一个联动杆a装配顶杆组件b,如此循环上述动作,便可使每个联动杆a均装配上顶杆组件b。
57.参考图6所示,联动器轴架装配装置5还包括联动器轴架上料机构53和轴钉插入机构54,联动器轴架上料机构53、轴钉插入机构54分别设置于第二定位机构52的两侧,联动器轴架上料机构53向第二定位机构52逐个输送联动器轴架c,并使联动器轴架c卡入联动杆a;轴钉插入机构54向第二定位机构52 逐个输送轴钉d,并让轴钉d插接于联动器轴架c和联动杆a之间,以使联动器轴架c转动连接于联动杆a上。
58.需要说明的是,第二定位机构52与第一定位机构23的结构基本一致,均主要以联动杆a的上基准面a2为定位面,使得定位面保持一致,有效避免联动杆a装配过程中,因定位面不一致而造成废品的问题。但第二定位机构52也做出了适应性调整,将面积更大的装配板521替代底板231,便于装配其他部件;此处开模机构24中的第六驱动器242安装在装配板521的底部,第六驱动器242 的输出端与推杆241相抵配合配合,动作更加直接快速;通过一个标准气缸替代第五驱动器232,该标准气缸安装在装配板521的底部,该标准气缸的输出端与此处的第二夹紧块237连接,且该标准气缸用于驱动第二夹紧块237,以将联动杆a顶出,方便下料;装配板521上设有顶料气缸522,顶料气缸522的输出轴与此处的第一定位块233相对设置,顶料气缸522与顶料机构25作用是一致。在第二定位机构52装夹联动杆a时,与第一定位机构23的装夹工作原理基本一致,此处不再一一赘述。
59.联动器轴架上料机构53包括限料块531、第二振动盘532、第三驱动器533 及第三夹爪534,限料块531上开设有相互垂直且连通的上料槽口5311和推料槽口5312,上料槽口5311与第二振动盘532的输出口对应设置,推料槽口5312 内滑动设有第二推料块535(参考
图10所示),第三驱动器533驱使第二推料块535沿推料槽口5312往复运动,以使单个联动器轴架c推向推料槽口5312 的侧面,第三夹爪534夹取推料槽口5312上的联动器轴架c并输送给第二定位机构52。
60.优选地,限料块531和第三驱动器533均安装在装配板521上,第三驱动器533采用标准气缸。第三夹爪534包括固设在装配板521上的第六支架536,第六支架536上安装有第十一气缸537,第十一气缸537的输出端连接有第十二气缸538,第十二气缸538的输出端连接有第六气动手指539,第十一气缸537 和第十二气缸538均采用滑台气缸。
61.轴钉插入机构54包括轴钉匣541、第三振动盘542及第四驱动器543,若干轴钉d可并列码放于轴钉匣541内,轴钉匣541上设有与第三振动盘542的输出口对应设置的入料口5411,轴钉匣541的底端贯穿有出料孔5412,出料孔 5412的开设方向与轴钉匣541内码放的轴钉d延长方向平行设置,出料孔5412 的一端与第二定位机构52对应设置,出料孔5412的另一端与第四驱动器543 对应设置;第四驱动器543的输出端连接有推料轴544,第四驱动器543驱使推料轴544沿出料孔5412往复滑动,以使单个轴钉d输送给第二定位机构52。
62.优选地,轴钉匣541和第四驱动器543均安装在装配板521上,第四驱动器543采用标准气缸。轴钉匣541内竖直开设有堆料腔5413,以使若干轴钉d 沿竖直方向呈单列码放,入料口5411与堆料腔5413的上端对应连通,出料孔 5412与堆料腔5413的下端对应设置,堆料腔5413的上端还设有激光检测器,用于检测堆料腔5413是否堆满轴钉d,当检测到堆满之后,会控制第三振动盘 542停止工作,避免轴钉d过度堆积,防止堵塞堆料腔5413(参考图11所示)。
63.具体的,装配板521上还设有断轴机构55,断轴机构55包括切断刀551和第七驱动器552,第七驱动器552固定安装在装配板521上,切断刀551通过连接块553与第七驱动器552的输出轴连接,连接块553上开设有供顶料气缸522 的输出轴通过的避让孔,切断刀551对应第二定位机构52设置,连接块553上固接有第三滑块554,第三滑块554滑动连接在第四滑轨555上,第四滑轨555 固定在装配板521上,第四滑轨555的延长方向与第七驱动器552的输出轴延长方向平行设置,第七驱动器552驱使切断刀551沿第四滑轨555往复滑动,以使切断刀551动作,从而切断轴钉d突出的部分,通过第三滑块554与第四滑轨555配合,保证切断刀551动作的平稳可靠,可有效将轴钉d切断。
64.第二机械手51包括第二支架511,第二支架511上装设有第三直线模组512,第三直线模组512的滑块上连接有第四直线模组513及第五直线模组514,第四直线模组513与第三直线模组512垂直设置,第四直线模组513的滑块上连接有第二气动手指515,第二气动手指515用于夹取定位装置2上的联动杆a;第五直线模组514与第四直线模组513平行设置,第五直线模组514的滑块上连接有第三气动手指516,第三气动手指516用于夹取第二定位机构52上的联动杆a。
65.优选地,第三直线模组512的滑块上固设有第二滑板517,第四直线模组 513和第五直线模组514均安装在第二滑板517上,使安装更加方便;第三气动手指516和第五直线模组514的滑块之间设有第二旋转气缸518。第四直线模组 513和第五直线模组514均采用直线气动模组,动作快速,提高加工效率。
66.在第二机械手51移料时,第三直线模组512工作,让第二气动手指515移动到第一定位机构23的上方,第四直线模组513工作,第二气动手指515下降,将联动杆a夹取,第四直
线模组513让第二气动手指515上升,同时第三气动手指516也移动到第二定位机构52的上方,第五直线模组514工作,第三气动手指516下降,将第二定位机构52上的联动器夹取,第五直线模组514让第三气动手指516上升;随后第三直线模组512工作,让第二气动手指515移动到第二定位机构52的上方,第三气动手指516移动到下料装置6的上方,第四直线模组513和第五直线模组514同时下降,第二旋转气缸518动作,将组装完成的联动器的位置摆正,以适应下料装置6,第二气动手指515和第三气动手指 516均松开,让第一定位机构23上移动过来的联动杆a装夹在第二定位机构52 上,让第二定位机构52上移动过来的联动器放置在下料装置6上;第二机械手 51再回复原位,等待下一次移料。
67.在组装联动器轴架c组装时,第二振动盘532工作,持续向上料槽口5311 处输送联动器轴架c,第三振动盘542也工作,持续向轴钉匣541的入料口5411 处输送轴钉d;由于推料槽口5312的宽度与联动器轴架c相适配,使得第三驱动器533每驱使第二推料块535动作一次,第二推料块535便向推料槽口5312 的侧面推出一个联动器轴架c,随后第三夹爪534工作,第十二气缸538伸出,让第六气动手指539靠近推出的联动器轴架c,第六气动手指539便于将其夹住,第十二气缸538便缩回,第十一气缸537伸出,使得联动器轴架c移动第二定位机构52的上方,第十二气缸538再次伸出,让联动器轴架c卡在第二定位机构52装夹的联动杆a上;紧接着第四驱动器543工作,驱使推料轴544动作一次,便将一根轴钉d插入联动杆a和联动器轴架c之间,然后断轴机构55工作,第七驱动器552驱使切断刀551动作一次,从而将轴钉d切断,从而完成联动器轴架c向联动杆a的组装。
68.参考图7所示,下料装置6包括下料架61,下料架61上设有至少两根平行设置的第二滑杆62,以使组装完成的联动器并列码放,相当于让联动器“躺卧”在第二滑杆62上;下料架61上还设有下料气缸63,下料气缸63设置在第二滑杆62的一端(此端对应第二机械手51设置),第二滑杆62的另一端设有挡料块64,下料气缸63的输出轴与第二滑杆62的延长方向平行设置。在下料装置 6工作时,第二机械手51将组装完成的联动器放置在第二滑杆62上,随后下料气缸63动作,推动该联动器向挡料块64移动,下料气缸63再回复原位,等待下一个组装完成的联动器,直至第二滑杆62上码满联动器,人工将整排联动器取走即可。
69.参考图12所示,此图用于示意联动器的加工过程,从上至下依次为入料件、半成品件及成品件,将入料件整齐的码放在联动杆上料装置1上,启动本设备,联动杆上料装置1逐个将入料件移动到定位装置2上,定位装置2工作,使得入料件依次经过点胶装置3和顶杆组件装配装置4,从而完成对入料件的点胶和顶杆组件b的组装,以形成半成品件,然后定位装置2将其移动到联动器轴架装配装置5对应处,联动器轴架装配装置5抓取半成品件进行加工,从而完成联动器轴架c的组装,以形成成品件,联动器轴架装配装置5将其移动到下料装置6,下料装置6对成品件下料。
70.以上显示和描述了发明的基本原理、主要特征和优点。本行业的技术人员应该了解,发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明发明的原理,在不脱离发明精神和范围的前提下,发明还会有各种变化和改进,这些变化和改进都落入要求保护的发明范围内。发明要求保护范围由所附的权利要求书及其效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1