一种特种车辆识别方法、装置及车辆与流程
本发明属于智能驾驶,具体涉及一种特种车辆识别方法、装置及车辆。
背景技术:
1、救护车、警车、消防车、工程救险车在执行紧急任务时,不受行驶路线、行驶方向、行驶速度和信号灯限制的通行自由,即拥有道路优先通行权。因此,在遇到上述特种车辆时,其他车辆需要主动避让,以保证特种车辆快速通行。但是,在城市交通路况中,特别是对于拥挤路段,由于声音嘈杂、视线不足,很难发现道路上执行任务的特种车辆。因此,在行驶过程中,要求其他车辆拥有精准的目标识别技术,以便精确感知自车周围的特种车辆,并为做出正确的决策控制及路径规划等相关动作提供帮助。
2、如授权公告号为cn107633684b的中国发明专利公开了一种用于无人驾驶车的特种车辆识别方法,该方法包括:多通道信息采集、车辆检测与特征提取、特种车辆识别处理。根据深度学习从多通道的实时交通视音频信息中提取目标车辆特征,利用贝叶斯统计学习实现多模态融合的特种车辆身份识别。根据特种车辆的标志及其特有的图像特征,以及警灯和警报的声光特征,可快速识别特种车。该方法需要构建深度学习网络模型,并且需要大量的训练数据才能保证模型识别的精度;另一方面,由于城市道路拥堵、嘈杂,可能存在无法拍摄到特种车辆图像的情况,从而导致对特种车辆识别的准确率较低。
技术实现思路
1、本发明的目的在于提供一种特种车辆识别方法、装置及车辆,用以解决对特种车辆识别准确率低的问题。
2、为解决上述技术问题,本发明所提供的技术方案以及技术方案对应的有益效果如下:
3、本发明的一种特种车辆识别方法,包括以下步骤:
4、在自车运行过程中,获取自车周围的声音数据并进行如下判断处理:
5、从获取的声音数据中截取k个预设周期的声音数据;对截取的声音数据进行处理,以提取k个预设周期内声音数据对应的基频特征序列;将所述基频特征序列与各种特种车辆声音模板特征序列进行相关性计算,得到与各种特征车辆声音模板相对应的相关系数;判断各相关系数是否大于相应的设定阈值,若存在大于相应的设定阈值的相关系数,则判定截取的声音数据中包含有该特种车辆声音;
6、根据对声音数据的判断处理结果,确定自车周围环境中是否存在特种车辆,以实现对特种车辆的识别。
7、上述技术方案的有益效果为:本发明采集了自车周围的声音数据,并对声音数据进行处理判断,以识别特种车辆。在声音数据处理判断时结合了特种车辆声音周期时长固定的特点,截取预设周期时长的数据对声音数据进行分析,本发明使用提取的基频特征序列直接与各特种车辆声音模板特征序列进行相关性计算,计算速度快且准确性高,进而实现对特种车辆识别精确度高且识别速度快。
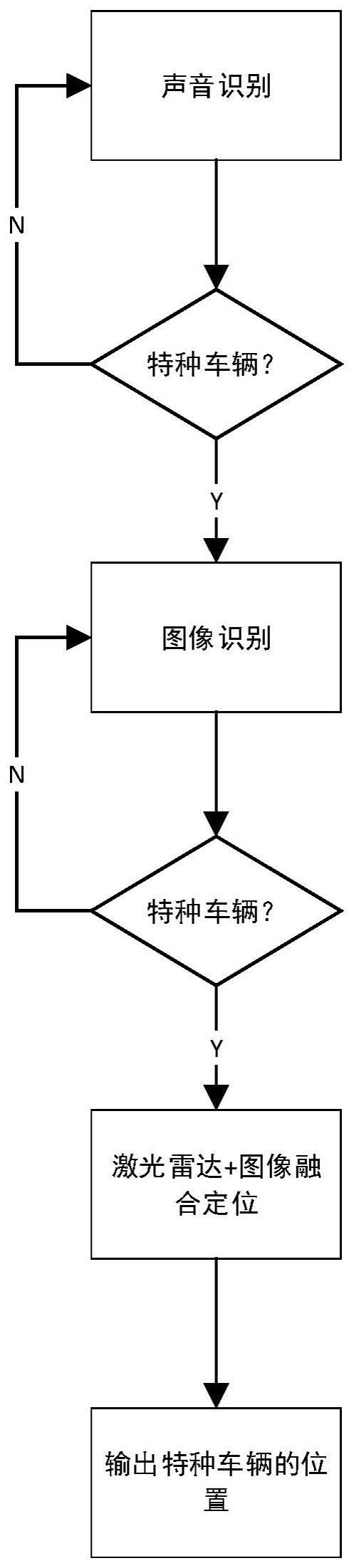
8、进一步地,在自车运行过程中,还获取自车周围环境的图像数据;若声音数据的判断处理结果为包含有特种车辆声音,还需对图像数据进行判断处理,以判断所述图像数据中是否含有特种车辆,若对图像数据的判断处理结果也为包含有特征车辆,则确定自车周围环境中存在特种车辆。
9、上述技术方案的有益效果为:为了检测特种车辆是否在执行任务中,结合特种车辆执行任务时需要开启报警声音的特点,本发明首先对特种车辆的声音进行声音识别处理,确定特种车辆在执行任务后,再对图像数据进行处理判断,以获得图像数据的判断处理结果;双重识别验证进一步提高了对特种车辆识别的精确度。此外,自车自身需要大量的计算,而对图像数据处理判断是否含有特种车辆的过程中会加大计算量从而影响计算性能,本发明首先只进行声音识别,减少了自车计算平台的计算量。
10、进一步地,提取基频特征序列所采用的手段为:采用交叠分段方法,对截取的声音数据进行分帧处理,并使用海明窗进行加窗处理;提取每帧数据的基频特征,从而得到所述基频特征序列。
11、上述技术方案的有益效果为:本发明交叠分段方法进行分帧能够提高特种车辆的声音识别率;并且使用了海明窗进行加窗处理,能够消除分帧之后的帧间不连续问题。
12、进一步地,在进行分帧处理时,帧移与帧长比值为0.5。
13、上述技术方案的有益效果为:本发明在进行分帧处理时,设置帧移与帧长比值为0.5,能够避免相邻两帧信号变化过大。
14、进一步地,将所述基频特征序列与各特种车辆声音模板特征序列进行相关性计算之前还需对所述基频特征序列进行带通滤波处理,且带通滤波处理时的带内权值为0.9,带外权值为0.1。
15、进一步地,所述相关系数的计算方法为:将所述基频特征序列和特种车辆声音模板特征序列均由时域转换为频域,将转换为频域后的结果进行共轭点乘计算,进而将共轭点乘计算后的结果再由频域转为时域,求取转为时域后结果的最大值,记所述最大值为相关系数。
16、进一步地,所述预设周期大小为等于5秒。
17、上述技术方案的有益效果为:本发明设定预设周期为5秒,结合了特种车辆如消防车、警车、救护车的鸣笛周期小于等于5秒的特点,使用相同周期声音数据能够为了提高识别精确度。
18、进一步地,若确认自车周围环境中存在特种车辆,则采用激光点云数据与所述图像数据进行融合的方法进行定位;具体定位方法为:
19、将激光点云数据投影到图像坐标系,与图像数据做融合;确定图像数据中特种车辆的像素位置,在激光点云数据中匹配到与所述像素位置相对应的激光点云位置;再通过点云聚类,得到特种车辆相对自车的位置的大小。
20、上述技术方案的有益效果为:本发明使用点云与图像数据融合技术进行定位特种车辆,能够精确定位特种车辆,从而辅助决策系统可做出准确的路径规划。
21、本发明提供的一种特种车辆识别装置,该装置包括处理器、存储器和内部总线,处理器、存储器之间通过内部总线完成相互间的通信和数据交互,所述处理器执行由所述存储器存储的计算机程序,以实现本发明的一种特种车辆识别方法,并达到与该特种车辆识别方法相同的有益效果。
22、本发明提供的一种车辆,包括车辆本体,还包括声音采集模块和图像采集模块,所述声音采集模块用于采集自车周围的声音数据,所述图像采集模块用于采集自车周围的图像数据,还包括处理器和存储器,所述处理器执行由所述存储器存储的计算机程序,以实现本发明的一种特种车辆识别方法,并达到与该特种车辆识别方法相同的有益效果。
技术特征:
1.一种特种车辆识别方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的特种车辆识别方法,其特征在于:在自车运行过程中,还获取自车周围环境的图像数据;若声音数据的判断处理结果为包含有特种车辆声音,还需对图像数据进行判断处理,以判断所述图像数据中是否含有特种车辆,若对图像数据的判断处理结果也为包含有特征车辆,则确定自车周围环境中存在特种车辆。
3.根据权利要求1所述的特种车辆识别方法,其特征在于:提取基频特征序列所采用的手段为:采用交叠分段方法,对截取的声音数据进行分帧处理,并使用海明窗进行加窗处理;提取每帧数据的基频特征,从而得到所述基频特征序列。
4.根据权利要求3所述的特种车辆识别方法,其特征在于:在进行分帧处理时,帧移与帧长比值为0.5。
5.根据权利要求1或2所述的特种车辆识别方法,其特征在于:将所述基频特征序列与各特种车辆声音模板特征序列进行相关性计算之前还需对所述基频特征序列进行带通滤波处理,且带通滤波处理时的带内权值为0.9,带外权值为0.1。
6.根据权利要求1所述的特种车辆识别方法,其特征在于:所述相关系数的计算方法为:
7.根据权利要求1所述的特种车辆识别方法,其特征在于:所述预设周期为5秒。
8.根据权利要求2所述的特种车辆识别方法,其特征在于:若确认自车周围环境中存在特种车辆,则采用激光点云数据与所述图像数据进行融合的方法进行定位;具体定位方法为:
9.一种特种车辆识别装置,其特征在于:该装置包括处理器、存储器和内部总线,处理器、存储器之间通过内部总线完成相互间的通信和数据交互,所述处理器执行由所述存储器存储的计算机程序,以实现如权利要求1-8任一项所述的特种车辆识别方法。
10.一种车辆,包括车辆本体,其特征在于:还包括声音采集模块和图像采集模块,所述声音采集模块用于采集自车周围的声音数据,所述图像采集模块用于采集自车周围的图像数据,还包括处理器和存储器,所述处理器执行由所述存储器存储的计算机程序,以实现如权利要求1-8任一项所述的特种车辆识别方法。
技术总结
本发明属于智能驾驶技术领域,具体涉及一种特种车辆识别方法、装置及车辆,包括:在自车运行过程中,对自车周围的声音数据进行如下判断处理:获取自车周围环境的声音数据,从中截取K个预设周期的声音数据;对截取的声音数据进行处理,以提取K个预设周期内声音数据对应的基频特征序列;将基频特征序列与各种特种车辆声音模板特征序列进行相关性计算,得到与各种特征车辆声音模板相对应的相关系数;判断各相关系数是否大于相应的设定阈值,若存在大于相应的设定阈值的相关系数,则判定截取的声音数据中含有该特种车辆声音;根据声音数据的判断处理结果,确定自车周围环境中是否存在特种车辆。由此,本发明能够精准的识别特种车辆。
技术研发人员:郭小飞,吴云龙,杨文娟
受保护的技术使用者:宇通客车股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!