一种车载机器人测试方法、装置、设备及介质与流程
本发明涉及车辆网,更具体地,涉及一种车载机器人测试方法、装置、设备及介质。
背景技术:
1、车载智慧语音机器人助手能够在用户驾乘之余,提供语音控车、路况监测、闲聊对话、驾驶提醒等诸多辅助功能。为保障车载机器人功能的扩展性,当有新功能扩展时,对新功能的测试就成为了保障新功能正常运行的重要手段之一。
2、目前对车载机器人采用的测试方法是对适用该新功能的车型进行实车测试,然而,由于进行实车测试需要项目进度、资源协调、样车管理等多板块协作才能完成,且各车型存在差异,需要对每种车型进行实车验证,测试周期长,效率低下,且成本过高。
技术实现思路
1、本发明为克服现有车载机器人需进行实车测试,导致测试周期长、效率低下以及成本高的缺陷,提供一种车载机器人测试方法、装置及、设备及介质。
2、为解决上述技术问题,本发明的技术方案如下:
3、第一个方面,本发明提出一种车载机器人测试方法,包括:
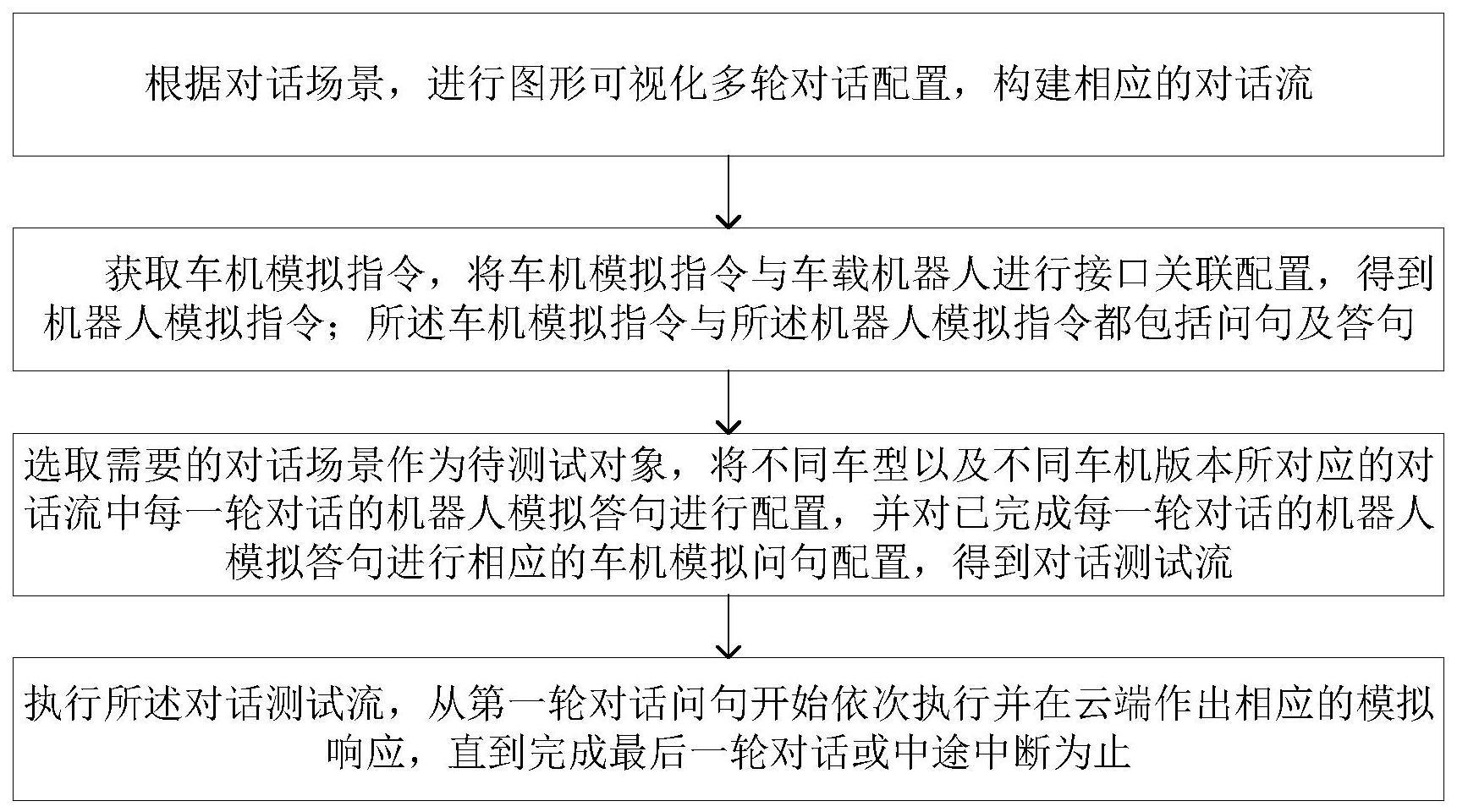
4、根据对话场景,进行图形可视化多轮对话配置,构建相应的对话流。
5、获取车机模拟指令,将车机模拟指令与车载机器人进行接口关联配置,得到机器人模拟指令。所述车机模拟指令与所述机器人模拟指令都包括问句及答句。
6、选取需要的对话场景作为待测试对象,将不同车型以及不同车机版本所对应的对话流中每一轮对话的机器人模拟答句进行配置,并对已完成每一轮对话的机器人模拟答句进行相应的机器人模拟问句配置,得到对话测试流。
7、执行所述对话测试流,从第一轮对话问句开始依次执行并作出相应的模拟响应,直到完成最后一轮对话或中途中断为止。
8、作为优选的技术方案,所述车机模拟指令与所述机器人模拟指令还包括车机控制指令。
9、作为优选的技术方案,所述机器人模拟答句被配置为:当机器人模拟答句为与车机控制相关联的语义节点时,车载机器人根据关联语义作出回答并调用车机控制指令执行控制响应;当机器人模拟答句为与车机控制语义非关联的节点时,车载机器人调用自身的问答库作出回答。
10、作为优选的技术方案,所述车载机器人调用车机控制指令执行控制响应,具体包括:车载机器人调用车机控制指令,根据车机控制指令中的控制逻辑进行虚拟执行控制,生成虚拟执行结果。
11、作为优选的技术方案,所述虚拟执行结果包括是否执行成功、执行次数以及执行时长。
12、作为优选的技术方案,所述车机控制指令包括车机软件的联动指令和车辆联网零部件的执行指令。
13、作为优选的技术方案,在对话测试流执行完毕后,根据对话测试流的执行结果生成测试报告,并根据所述测试报告,对车载机器人进行修复或扩展。
14、第二个方面,本发明还提出一种车载机器人测试装置,包括:
15、构建模块,用于根据对话场景,进行图形可视化多轮对话配置,构建相应的对话流。
16、第一配置模块,获取车机模拟指令,将车机模拟指令与车载机器人进行接口关联配置,得到机器人模拟指令。所述车机模拟指令与所述机器人模拟指令都包括问句及答句。
17、第二配置模块,选取需要的对话场景作为待测试对象,将不同车型以及不同车机版本所对应的对话流中每一轮对话的机器人模拟答句进行配置,并对已完成每一轮对话的机器人模拟答句进行相应的机器人模拟问句配置,得到对话测试流。
18、执行模块,执行所述对话测试流,从第一轮对话问句开始依次执行并作出相应的模拟响应,直到完成最后一轮对话或中途中断为止。
19、第三个方面,本发明还提出一种计算设备,所述计算设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其中,所述处理器执行所述程序时实现如第一个方面所述的车载机器人测试方法所执行的操作。
20、第四个方面,本发明还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有程序,所述程序被处理器执行如第一个方面所述的车载机器人测试方法所执行的操作。
21、与现有技术相比,本发明技术方案的有益效果是:本发明通过根据对话场景构建相应的对话流,并利用车机模拟指令而非真实指令信号,与车载机器人进行接口关联配置,得到机器人模拟指令,并根据选取需要的对话场景作为待测试对象对机器人模拟指令进行问答句配置,得到对话测试流,通过执行所述对话测试流,使得车载机器人的测试过程可以全程在云端进行,无需依赖任何外界的因素影响,避免了在实车验证测试过程中涉及试验车的管理、进度排期以及跨部门沟通协调等多方面因素,很大程度地缩短了测试周期、提高了测试效率,以及降低了测试成本。
技术特征:
1.一种车载机器人测试方法,其特征在于,包括:
2.根据权利要求1所述的车载机器人测试方法,其特征在于,所述车机模拟指令与所述机器人模拟指令都还包括车机控制指令。
3.根据权利要求2所述的车载机器人测试方法,其特征在于,所述机器人模拟答句被配置为:当机器人模拟答句为与车机控制相关联的语义节点时,车载机器人根据关联语义作出回答并调用车机控制指令执行控制响应;当机器人模拟答句为与车机控制语义非关联的节点时,车载机器人调用自身的问答库作出回答。
4.根据权利要求3所述的车载机器人测试方法,其特征在于,所述车载机器人调用车机控制指令执行控制响应,具体包括:车载机器人调用车机控制指令,根据车机控制指令中的控制逻辑进行虚拟执行控制,生成虚拟执行结果。
5.根据权利要求4所述的车载机器人测试方法,其特征在于,所述虚拟执行结果包括是否执行成功、执行次数以及执行时长。
6.根据权利要求2所述的车载机器人云端测试方法,其特征在于,所述车机控制指令包括车机软件的联动指令和车辆联网零部件的执行指令。
7.根据权利要求1~6任一项所述的车载机器人测试方法,其特征在于,所述方法还包括:在对话测试流执行完毕后,根据对话测试流的执行结果生成测试报告,并根据所述测试报告,对车载机器人进行修复或扩展。
8.一种车载机器人测试装置,其特征在于,包括:
9.一种计算设备,其特征在于,所述计算设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其中,所述处理器执行所述程序时实现如权利要求1至7中任一项所述的车载机器人测试方法所执行的操作。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有程序,所述程序被处理器执行如权利要求1至7中任一项所述的车载机器人测试方法所执行的操作。
技术总结
本发明涉及车辆网技术领域,涉及一种车载机器人测试方法、装置、设备及介质,方法包括根据对话场景,构建对话流;获取车机模拟指令,将车机模拟指令与车载机器人进行接口关联配置,得到机器人模拟指令;将不同车型以及不同车机版本所对应的对话流中每一轮对话的机器人模拟答句进行配置,并对已完成每一轮对话的机器人模拟答句进行相应的机器人模拟问句配置,得到对话测试流;执行对话测试流,从第一轮对话问句开始依次执行并作出相应的模拟响应,直到完成最后一轮对话或中途中断为止。本发明通过使得车载机器人的测试过程可以全程在云端进行,无需依赖任何外界的因素影响,很大程度地缩短了测试周期、提高了测试效率,以及降低了测试成本。
技术研发人员:廖一鸣
受保护的技术使用者:重庆长安汽车股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!