一种并联声-振混合主动控制方法与装置
本技术属于振动和噪声主动控制,具体涉及一种并联声-振混合主动控制方法与装置。
背景技术:
1、环境噪声问题已成为社会的一大公害。车辆噪声(包括汽车噪声、地铁噪声、高速列车噪声、工程机械噪声等)作为一个主要的环境噪声污染,已在世界范围内得到了广泛的重视。噪声和振动控制通常有被动控制和主动控制两种方法。被动控制是通过隔音、吸音、消振、隔振、结构修改等控制振动噪声的方式。主动控制是实时监测目标区域的声环境或结构振动,控制器产生与初级噪声源或初级振动源幅值相等相位相反的相干涉的次级信号,以抵消初级噪声源或初级振动源。控制方法决定了主动控制效果,越来越多的学者将智能算法应用到主动控制方法上且形成了多种混合主动控制方法。但目前混合控制多是前馈和反馈结构的混合,其中也有不同算法的混合控制,关于噪声和振动两种方法的混合主动控制较少。
技术实现思路
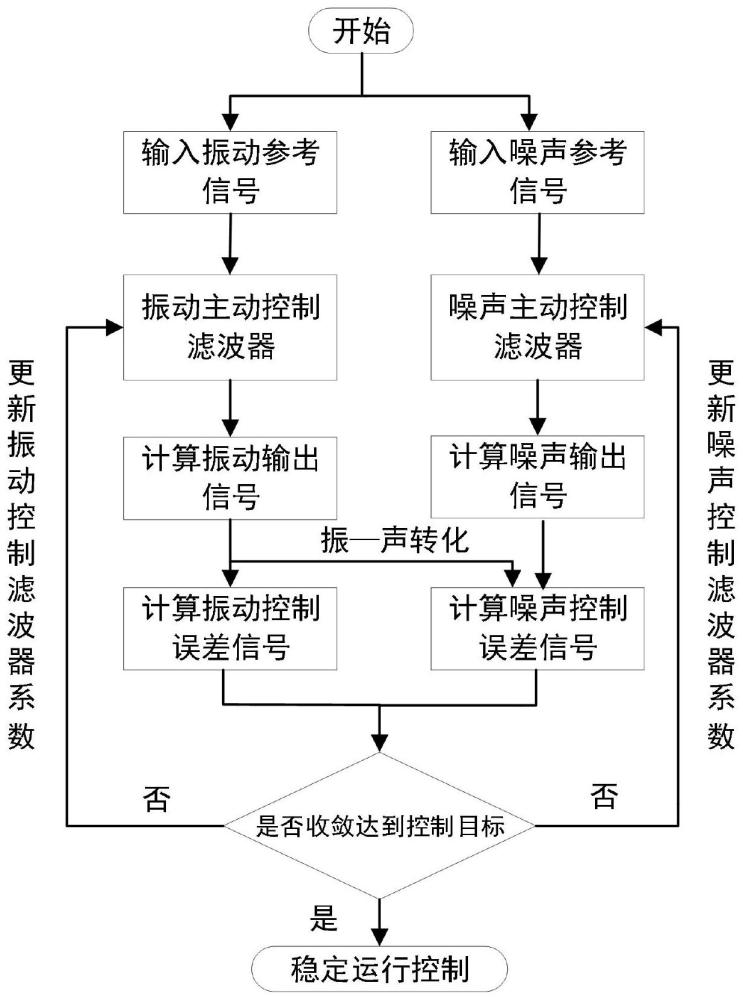
1、本技术旨在解决现有技术的不足,提出一种并联声-振混合主动控制方法,包括:
2、s1、获取振动参考信号和噪声参考信号;
3、s2、将所述振动参考信号与所述噪声参考信号分别利用振动主动控制滤波器与噪声主动控制滤波器同时进行滤波,得到振动输出信号和噪声输出信号;
4、s3、基于所述振动输出信号进行振-声转换;
5、s4、基于所述振动输出信号得到振动控制误差信号,基于所述振-声转换与所述噪声输出信号得到噪声控制误差信号;
6、s5、判断所述振动控制误差信号是否收敛达到控制目标,若没有达到,则更新所述振动控制滤波器系数与所述噪声控制滤波器的系数重新进行误差信号的计算;若达到控制目标,则稳定运行控制。
7、可选的,所述s1中,振动参考信号来自控制点的振动信号。
8、可选的,所述s2中,所述振动主动控制滤波器采用滤波u最小均方算法;所述噪声主动控制滤波器采用滤波x最小均方算法。
9、可选的,所述滤波u最小均方算法包括:前馈滤波器与反馈滤波器,滤波器权矢量长度分别为l1和l2;输入信号xv(n)经过初级通道pv(z)后得到期望信号dv(n);控制滤波器的时域输入和输出关系是:
10、
11、式中,和分别是前馈滤波器和反馈滤波器的权系数,分别构成两个滤波器权矢量w1、w2;
12、输入参考信号矢量和滤波器输出信号矢量记为
13、xv(n)=[xv(n),xv(n-1),...,xv(n-l1+1)]t
14、yv(n)=[yv(n-1),yv(n-2),...,yv(n-l2)]t
15、不考虑次级路径的影响,则残余误差信号可表示为:
16、
17、按最陡下降法原理,前馈和反馈滤波器权矢量的递推公式分别表示为:
18、w1(n+1)=w1(n)+2μ1ev(n)xv(n)
19、w2(n+1)=w2(n)+2μ2ev(n)yv(n)
20、将两个滤波器的权矢量合并为一个统一的权矢量,有:
21、wv(n)=[w1t(n) w2t(n)]t
22、并令
23、uv(n)=[xvt(n) yvt(n)]t
24、则fulms算法的权矢量迭代公式改写为:
25、wv(n+1)=wv(n)+2μvev(n)uv(n)。
26、可选的,所述滤波x最小均方算法包括:
27、对于权系数长度为l的横向滤波器,第n时刻滤波器输出为:
28、
29、滤波器输出y(n)是l个输入参考信号的线性加权之和,加权系数为wl(n)(l=1,2,3,…,l),l个权系数组成了该滤波器的脉冲响应;
30、定义滤波器权系数矢量和输入参考信号矢量分别为:
31、w=[w1(n),w2(n),...,wl(n)]t
32、x(n)=[x(n),x(n-1),...,x(n-l+1)]t
33、用矢量形式表示y(n)为:
34、y(n)=xt(n)w=wtx(n)
35、滤波器输出信号经过次级路径到误差传感器位置则有:
36、ys(n)=y(n)*s(n)=wtx(n)*s(n)
37、式中,*表示线性卷积运算,s(n)为次级路径的单位脉冲响应力;
38、设
39、xs(n)=x(n)*s(n)
40、则经次级路径后的输出信号为:
41、
42、xs(n)为滤波输入信号,由它组成的列矢量为滤波-x信号矢量,有:
43、xs(n)=[xs(n),xs(n-1),...,xs(n-l+1)]t。
44、可选的,所述s4中,得到振动控制误差信号与噪声控制误差信号具体过程包括:
45、考虑到次级路径的影响,控制器输出信号经过次级路径传递至目标控制点的信号有:
46、yvs(n)=yv(n)*sv(n)
47、式中,“*”表示线性卷积,sv(n)为次级路径sv(z)的单位脉冲响应;
48、前馈和反馈滤波器权矢量的递推公式更新为
49、w1(n+1)=w1(n)+2μ1ev(n)xv(n)*sv(n)
50、w2(n+1)=w2(n)+2μ2ev(n)yv(n)*sv(n)
51、每一次迭代需要将振动降低量转化为辐射噪声降低量,即振动主动控制部分与噪声主动控制部分之间的连接,振动主动控制振动降低量与噪声控制目标点辐射噪声降低量之间通过传递路径进行转化;其表达式为:
52、yas(n)=yvs(n)*sva(n)
53、式中,*表示线性卷积运算,sva(n)为振动控制目标点至噪声控制目标点传递路径的单位响应,yvs(n)为振动控制目标点振动降低量也为控制器输出信号经过次级路径传递至目标控制点的信号,yas(n)为振动主动控制振动降低量转化后的噪声控制目标点辐射噪声降低量;
54、对于权系数长度为l的横向滤波器,第n时刻滤波器输出为
55、
56、滤波器输出y(n)是l个输入参考信号的线性加权之和,加权系数为wl(n)(l=1,2,3,…,l),l个权系数组成了该滤波器的脉冲响应;定义滤波器权系数矢量和输入参考信号矢量分别为
57、w=[w1(n),w2(n),...,wl(n)]t
58、x(n)=[x(n),x(n-1),...,x(n-l+1)]t
59、用矢量形式表示y(n)为:
60、y(n)=xt(n)w=wtx(n)
61、滤波器输出信号经过次级路径到误差传感器位置则有:
62、ys(n)=y(n)*s(n)=wtx(n)*s(n)
63、式中,*表示线性卷积运算,s(n)为次级路径的单位脉冲响应力;
64、设
65、xs(n)=x(n)*s(n)
66、则经次级路径后的输出信号为:
67、
68、xs(n)为滤波输入信号,由它组成的列矢量为滤波-x信号矢量,有:
69、xs(n)=[xs(n),xs(n-1),...,xs(n-l+1)]t。
70、可选的,所述s5中,更新进行误差信号的计算具体包括:振动主动控制和噪声主动控制同时开始,但在噪声主动控制中每一次迭代过程中求残余噪声误差信号时多减一部分由于振动主动控制在目标点降低的振动辐射噪声,此部分计算是振动主动控制和噪声主动控制并联混合主动控制的连接点;
71、其表达式为:
72、
73、式中,ys(n)为输出信号经过次级路径至目标控制点后的噪声信号,d(n)为期望噪声信号,e(n)为n时刻受控目标点残余噪声误差信号也为第n时刻误差传感器接收到的信号;
74、按最陡下降法原理,前馈和反馈滤波器权矢量的递推公式分别表示为:
75、w(n+1)=w(n)+2μe(n)xs(n)。
76、本技术还包括一种并联声-振混合主动控制装置,包括:振动主动控制部分、噪声主动控制部分以及两部分之间的连接。
77、所述的振动主动控制部分包括输入的振动参考信号、振动主动控制算法、振动控制输出信号、振动控制误差信号、振动控制的初级路径和次级路径。
78、所述的噪声主动控制部分包括输入的噪声参考信号、噪声主动控制算法、噪声控制输出信号、噪声控制误差信号、噪声控制的初级路径和次级路径。
79、所述的振动主动控制部分与噪声主动控制部分之间的连接,振动主动控制振动降低量与噪声控制目标点辐射噪声降低量之间通过传递路径进行转化。
80、与现有技术相比,本技术的有益效果为:
81、(1)本技术可以应用在噪声控制目标点噪声由噪声源和振动源同时产生的场景。比如汽车车内乘员耳侧噪声主动控制,乘员耳侧噪声由发动机等噪声源辐射声和车身板件等振动源辐射声共同产生。
82、(2)本技术的混合主动控制方法可以同时实施振动主动控制和噪声主动控制,在振动主动控制的基础上再进行噪声主动控制,达到对目标噪声的精准控制。
- 还没有人留言评论。精彩留言会获得点赞!