一种无人机载拾音设备远场噪声事件取证系统及其方法
本发明涉及噪声数据处理,具体涉及一种无人机载拾音设备远场噪声事件取证系统及其方法。
背景技术:
1、现有的无人机的飞行任务通常以多维度摄像功能为主,极少具备录音功能,而具备录音功能的无人机所针对的录音对象大多是日常声源,日常声源的声压级较低,难以拾取,而且具备录音的无人机未考虑到音频录取模块与无人机的连接方式,以及无人机的振动与对音频录制的干扰,振动将影响音频录制的音质稳定性,具备录音的无人机也很少使用主动降噪和被动降噪的复合型降噪方法;
2、在飞行器搭载拾音器的领域中,飞行器的飞行高度要远超30m,所以无人机搭载拾音器进行取证的噪声都处于远场声场中,此时拾音器对地面声源的拾取能力将大大减弱,远场地面声源对于拾音器的影响要小于无人机背景噪声;而无人机为满足拾音器有效距离的要求,选择在更低高度进行飞行时,会受旋翼噪声地面反射及避障安全风险增加的局限;
3、再者,具备录音的无人机多使用anc有源主动降噪,需要设置多个次级声源发生器,来对抗其飞行器的背景噪声,但次级声源发生器的声波由于安装位置不同自适应调整后产生的反相对抗噪声波与原背景声波难在拾音器焦点形成完美的抵消,反而会由于相位差距,声波进行了叠加从而产生更大的噪声。
4、因此,在针对如今城市环境噪声溯源观测与管理体系,亟需通过基于无人机搭载拾音设备实现对远场噪声拾取留证并可量化评估的技术,实现针对噪声超标投诉扰民的一种移动性强,具备垂直观测,音视频多源取证手段。
技术实现思路
1、为了克服现有技术存在的缺陷与不足,本发明提供一种无人机载拾音设备远场噪声事件取证系统及其方法,通过设置降噪桨叶、降噪聚音罩、减振模块与垂钓模块进行被动降噪,通过先验调优主动降噪算法,更加快速迭代生成抗噪信号,在声电信号转换后进行抗噪抵消,最终逆傅里叶变换得到有效音频,其能够更有效地提高信号的信噪比,基于被动降噪和主动降噪的复合型降噪方式,最终实现对远场噪声事件进行多源音视频取证。
2、为了达到上述目的,本发明采用以下技术方案:
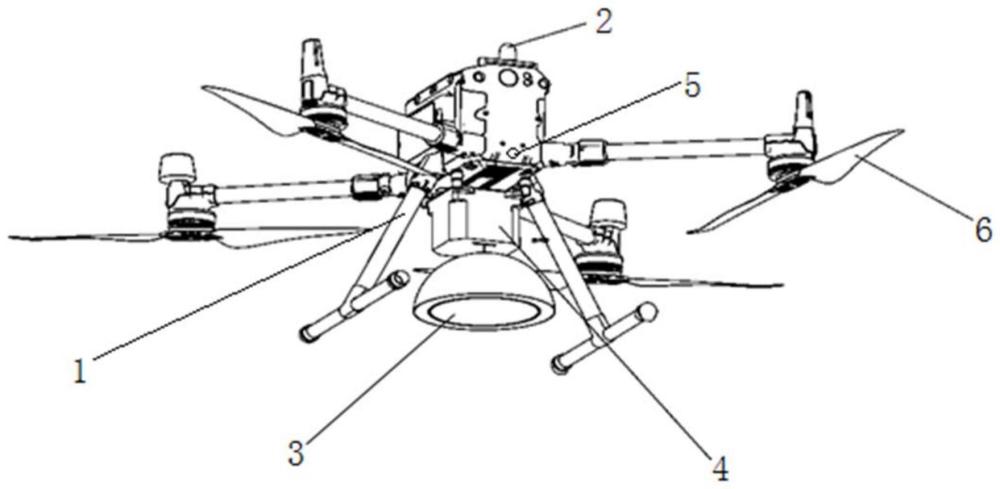
3、本发明提供一种无人机载拾音设备远场噪声事件取证系统,包括:多旋翼无人机、背景麦克风、远场噪声拾音模块、垂钓模块、减振模块和音频处理模块;
4、所述背景麦克风设于多旋翼无人机顶部,所述背景麦克风用于采集多旋翼无人机在不同飞行高程和不同情景下的背景噪声;
5、所述多旋翼无人机设有用于同步获取现场视频数据的视频获取模块,所述多旋翼无人机通过减振模块与垂钓模块连接,所述垂钓模块与远场噪声拾音模块连接,所述垂钓模块用于调节远场噪声拾音模块的垂钓高度,远场噪声拾音模块用于拾取不同高程的远场噪声;
6、所述音频处理模块包括频谱分析单元、主动降噪单元、数据分析转换单元和数据存储单元;
7、所述频谱分析单元用于基于短时傅里叶变换将背景噪声进行频谱分析,并将频谱分析结果传输至主动降噪单元;
8、所述主动降噪单元用于将背景噪声进行傅里叶变换后结合先验调优主动降噪算法进行迭代模拟,生成背景噪声信号的反相信号,通过时域与远场噪声信号进行叠加处理实现相位抵消,通过反傅里叶变换得到有效目标噪声音频,并传输至数据分析转换单元;
9、所述数据分析转换单元用于对有效目标噪声音频进行分析转换,将时域幅值转换成声压级数据,并传输至数据存储单元;
10、所述数据存储单元用于接收并存储数据分析转换单元的分析转换结果,以及存储视频获取模块所采集的地面远场噪声事件的视频数据。
11、作为优选的技术方案,所述远场噪声拾音模块包括固定杆、声卡、降噪聚音罩和拾音麦克风,所述固定杆的一端与垂钓模块连接,所述固定杆的另一端与降噪聚音罩连接,所述拾音麦克风设于降噪聚音罩的内部反射焦点,用于拾取远场噪声,所述声卡用于将背景麦克风、拾音麦克风所采集到的电信号转换成数字信号,所述降噪聚音罩用于降低无人机上方所传播的背景噪声,会聚地面传播的远场噪声。
12、作为优选的技术方案,所述降噪聚音罩从外到内依次设有金属外壳、隔音层、吸音层和反射层,所述隔音层用于隔绝多旋翼无人机上方传下的背景噪声,吸音层用于吸收穿过隔音层的剩余背景噪声,所述反射层用于反射远场声波并将远场声波集聚在降噪聚音罩结构内部焦点。
13、作为优选的技术方案,所述垂钓模块包括垂钓收放控制器、无刷电机、电池、钓线盘和钓线,所述垂钓收放控制器与无刷电机电性连接,所述无刷电机的输出轴与钓线盘连接,所述电池与无刷电机电性连接,所述钓线的一端与钓线盘连接,所述钓线的另一端与远场噪声拾音模块连接,所述垂钓收放控制器通过收放控制信号控制无刷电机的输出轴正转或翻转,带动钓线盘转动,通过钓线调节远场噪声拾音模块的垂钓高度。
14、作为优选的技术方案,所述多旋翼无人机设有超碳纤维降噪桨叶。
15、作为优选的技术方案,所述背景麦克风采用全向型麦克风,所述拾音麦克风采用单指向麦克风,所述背景麦克风和拾音麦克风均设有防风棉。
16、本发明还提供一种无人机载拾音设备远场噪声事件取证方法,设有上述无人机载拾音设备远场噪声事件取证系统,包括下述步骤:
17、在不同高程、不同垂钓高度采集多旋翼无人机的飞行参数数据,基于背景麦克风采集获取第一背景噪声,并构建不同飞行监测情景的参数数据库,根据声音衰减算法设定垂钓模块的垂钓高度,设定多旋翼无人机的飞行高程;
18、执行飞行监测任务,基于背景麦克风采集飞行监测任务时无人机的第二背景源噪声信号,将第二背景源噪声信号数据传输至音频处理模块,通过频谱分析得到声功率谱图,得到第二背景源噪声的频带;
19、执行飞行监测任务,基于拾音麦克风采集飞行监测任务时地面远场噪声信号;
20、基于先验调优主动降噪算法生成第二背景源噪声信号的反相信号,与地面远场噪声信号叠加生成抗噪信号;
21、将抗噪信号转换为音频信号文件进行存储,计算生成对应模拟声压级。
22、作为优选的技术方案,所述声音衰减算法具体包括:
23、当波长远大于声源尺寸并在远场情况时,视该声源为点声源,在自由声场的远场条件下,按声功率级作为点声源的评价量,衰减量公式表示为:
24、
25、其中,δl表示距离增加产生的衰减值,单位为db,r表示点声源至受声点的距离,单位为m;
26、在距离点声源,r1处至r2处的衰减值表示为:
27、δl=20lg(r1/r2)
28、其中,r1表示拾音麦克风在降噪聚音罩中的距离,r2表示无人机至拾音麦克风的距离。
29、作为优选的技术方案,所述基于先验调优主动降噪算法生成第二背景源噪声信号的反相信号,与地面远场噪声信号叠加生成抗噪信号,具体步骤包括:
30、利用在n-1时刻的滤波器抽头权系数,通过迭代更新,求出n时刻的滤波器抽头权系数;
31、基于指数加权的误差平方和构建代价函数,表示为:
32、j(n)=∑λn-i|d(i)-wh(n)*x(i)|2
33、其中,λ表示遗忘因子,w表示权重,d(i)表示拾音麦克风拾取的地面远场噪声信号序列,x(i)表示背景麦克风采集的背景噪声序列,
34、对代价函数中的权重求偏导,最优解时:
35、w(n)=r-1(n)r(n)
36、
37、
38、迭代更新,利用矩阵求逆引理:
39、
40、
41、其中,k(n)表示为增益向量,p(n)表示逆矩阵;
42、更新权重:
43、w(n)=w(n-1)+k(n)ε*(n)
44、更新误差:
45、ε(n)=d(n)-wh(n-1)x(n)
46、使用更新后的滤波器抽头系数进行计算,得到模拟信号wh(n-1)x(n),将模拟信号反相信号与地面远场噪声信号序列进行叠加,得到抗噪信号ε(n)。
47、作为优选的技术方案,所述计算生成对应模拟声压级,具体包括:
48、
49、
50、其中,p′e表示有效声压级,pe表示在设定时间内采集到的瞬时声压大小,x为麦克风转化成信号幅值大小,n表示时域采样点数,pref表示参考声压,paop为硬件麦克风的最大声压级;
51、将有效声压级p′e代入等效声压级公式,得到:
52、
53、其中,srl表示声压级。
54、本发明与现有技术相比,具有如下优点和有益效果:
55、(1)本发明基于被动降噪和主动降噪的复合型降噪方式,实现对目标远场噪声进行取证,其中,本发明通过设置降噪桨叶、降噪聚音罩、减振模块与垂钓模块进行被动降噪,大幅度降低了多旋翼无人机上方所传播的背景噪音及其他高频噪声,通过被动降噪吸收并隔绝上方无人机所传播的底噪,同时根据声音反射的原理放大地面目标噪声信号,从而进一步提高有效信号信噪比,具体基于降噪桨叶结构减少无人机飞行任务时桨叶产生的涡流风噪和震动,降噪聚音罩从外到内依次设有金属外壳、隔音层、吸音层、反射层,基于降噪聚音罩有效地隔绝无人机上方传播的旋翼噪声与机噪,同时拾音麦克风设于降噪聚音罩内,能够更好的捕捉地面的目标有效音频信号,大大提高信噪比;
56、本发明通过先验调优主动降噪算法,更加快速迭代生成抗噪信号,在声电信号转换后进行抗噪抵消,最终逆傅里叶变换得到有效音频,其能够更有效地提高信号的信噪比,将降噪处理过程在dsp芯片中进行处理完成,同时舍弃了传统anc中的次级声源发生器,避免了系统的复杂程度以及降低实际传播过程中由于硬件介质造成的相位偏差,能够更加高效地实现降噪效果。
57、(2)本发明的多旋翼无人机通过减振模块与垂钓模块连接,减少多旋翼无人机飞行引起的振动带来的影响,垂钓模块与远场噪声拾音模块连接,自由调节远场噪声拾音模块的垂钓高度,让远场噪声拾音模块进行定点垂钓取证,有效增加多旋翼无人机背景声源与远场噪声拾音模块的距离,并减少远场噪声拾音模块与地面噪声源的距离,根据噪声衰减理论,能够大幅度提高拾音器能够拾取噪声的音频的信噪比,同时也大幅度提高了多旋翼无人机的飞行高程,减少了多旋翼无人机的旋翼噪声反射及避障安全风险,提高了多旋翼无人机对远场噪声扰民事件取证的场景适应性。
- 还没有人留言评论。精彩留言会获得点赞!