基于多层卷积稀疏编码的传动装置故障定位优化方法与流程
本发明属于机械故障诊断领域,涉及一种基于多层卷积稀疏编码的传动装置故障定位优化方法。
背景技术:
1、现有的旋转机械传动系统故障诊断与定位方法往往利用振动传感器采集运行状态的数据,但其接触式的测量方式在高温、高压和高腐蚀的场景不适用。基于振动信号采集的局限性,许多科研人员研究利用其他类型信号实现对旋转机械传动系统的诊断分析,如声音信号。与振动信号相比,声音信号具有非接触式测量的优势,不会因为旋转机械传动系统的剧烈振动导致传感器与旋转机械本身发生相对移动,并且能更易识别旋转机械传动系统的早期故障特征,具有较好的应用前景。
2、麦克风阵列是一组按特定方式排列的声音收集器。麦克风阵列技术的典型应用包括视频会议、声源定位、语音识别和人机交互等领域。基于麦克风阵列的声源定位是其主要功能之一。麦克风阵列声源定位,简而言之就是利用麦克风阵列来确定声源的空间位置。然而在实际工况下,由于旋转机械传动系统与周围环境运行产生的声音信号产生大量干扰噪声,导致采集到的声音信号信噪比较低。在此基础上,利用麦克风阵列信号通过成像算法生成的旋转机械传动系统故障定位结果的精度往往达不到工业检测的要求。虽然目前有许多研究致力于通过改进信号预处理的办法来从采集到的的声学信号中过滤掉环境噪声等因素的影响,但其过程通常涉及大量复杂的计算且对于结果的精度的提升有限。
3、近年来,深度学习方法在图像处理领域取得了较大的进展。2015年isbi竞赛中提出的unet网络只需要少量的训练样本就能达到良好的语义分割效果,这提供了另一种对传动装置故障声学定位结果图优化的思路。但是,深度学习算法相较于传统的信号处理方法而言,其运算过程复杂,训练过程繁琐,且训练样本集要求大量的数据不好采集。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于多层卷积稀疏编码的传动装置故障定位优化方法,克服了传统旋转机械传动系统振动检测实际运用的安装不便、随设备一起振动、不适用于高温、高压和高腐蚀环境的局限性,优化了传统旋转机械传动系统振动声学检测定位结果以提高定位精度,减少了传统旋转机械传动系统声学检测运用深度学习算法的参数量、降低了运算成本,提供了一定的可解释性。
2、为达到上述目的,本发明提供如下技术方案:
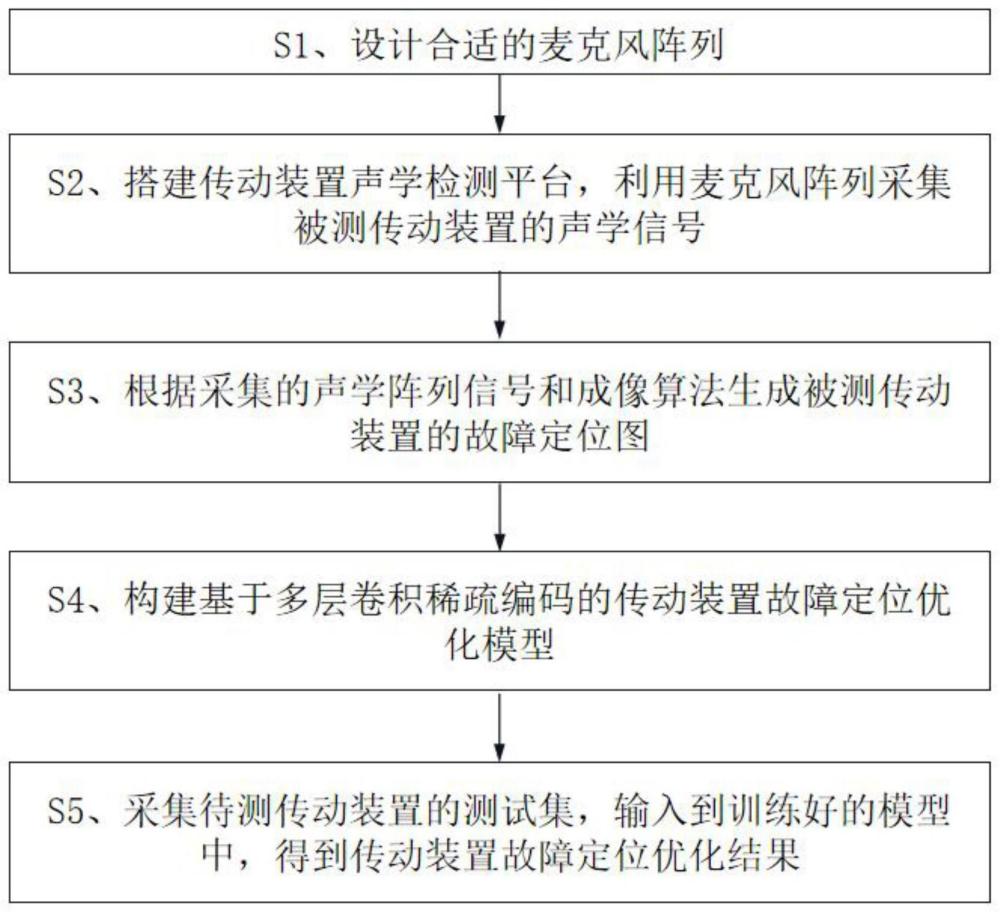
3、基于多层卷积稀疏编码的传动装置故障定位优化方法,该方法包括以下步骤:
4、s1:根据被测传动装置设计麦克风阵列,麦克风阵列满足整个阵列区域在空间上能够覆盖被测传动装置,且每个麦克风传感器能够采集到被测传动装置发出的声学信号,麦克风阵列垂直于地面;
5、s2:根据设计好的麦克风阵列,构建传统旋转机械传动装置声学信号采集系统,利用麦克风阵列采集被测传动装置的声学信号;
6、s3:根据被测传动装置的实际工况设计多个故障位置,每个故障位置根据采集的声学阵列信号和成像算法生成被测传动装置的故障定位图;
7、s4:构建基于多层卷积稀疏编码的传动装置故障定位优化模型,将s3中生产的不同故障位置的故障定位图作为训练集,输入到网络模型中进行训练,得到训练好的传动装置故障定位优化模型;
8、s5:对实际被测的作为实验验证的传动装置重复s1、s2和s3,将生成的故障定位图作为测试集,输入到训练好的传动装置故障定位优化模型中,得到传动装置故障定位优化结果。
9、可选的,所述s2中,声学信号采集处理方法为:
10、s21:声音信号在空气中传播至麦克风接收,其衰减比例与信号中心频率r(f)、反射面间距s、反射面吸声系数ξ、空气中的单位距离下信号衰减比例γ及反射次数i直接相关,具体参数通过《声学手册》查得;麦克风传感器采集到的信号r由直达信号r0及反射声叠加而成,表示为:
11、
12、其中,用采集到的信号r减去反射声叠加信号就可以获得包含了传动装置故障信息的直达信号r0。
13、可选的,所述s3具体包括以下步骤:
14、s31:设被测传动装置的每个故障位置在传感器阵列中对应的位置为(x,y),其通过成像算法生成的图像素值p(x,y)表示为:
15、
16、其中,(xi,yi)和(xj,yj)分别表示用于构成一条检测路径的两端点上麦克风传感器的坐标;c表示声学信号的传播速度,在空气中约为340m/s;m表示麦克风传感器的总数;d表示麦克风阵列平面与被测传动装置故障点之间的水平距离;为避免近场信号的复杂性,麦克风阵列布置在远场位置,d满足以下条件:
17、
18、其中,l表示阵列长度,λ表示信号波长;
19、s32:对每一点的像素值进行归一化处理后获得每个损伤样本的损伤成像图:
20、p(x,y)=p(x,y)/max(p(x,y))。
21、可选的,所述s4中,作为训练集的样本,是同一个被测传动装置在不同转速和负载下的不同位置的故障定位图,对于训练集分为80%的样本用于训练,20%的样本用于验证。
22、可选的,所述s4中,基于多层卷积稀疏编码的传动装置故障定位优化模型的构建具体包括以下步骤:
23、s41:构建基于u形卷积网络且含有编码层和解码层的损伤轮廓预测网络模型,编码层路径负责捕获输入图像的详细信息,解码层路径负责实现定位,为保持解码层生成的高维特征向量的尺寸和内容信息不丢失,在编码层的每个下采样块和所述解码层的每个上采样块之间添加跳跃连接;
24、s42:采用多层卷积稀疏编码ml-csc模块代替u形卷积网络中的卷积层,将损伤成像图作为损伤轮廓预测网络模型的输入图像y,则表示为:
25、y=d1γ1,
26、γ1=d2γ2,
27、
28、γl-1=dlγl.
29、其中,γi表示第i层卷积结果,i=1,2,...,l,l表示层数;di表示特殊字典;每个di表示卷积矩阵wi的转置,即:
30、di=wit
31、s43:在基追踪算法的基础上,构建一种交替分层追踪算法,即求解以下方程式:
32、
33、
34、
35、
36、其中,表示交替分层追踪算法的输入且有表示交替分层追踪算法的第i层稀疏解;表示l2范数的平方;||||1表示稀疏正则化约束项;λi表示控制γi稀疏性的正则化参数;
37、s44:将稀疏解用形如卷积神经网络cnn向前传播的形式进行近似表示,交替分层追踪算法的近似解算器采用多层迭代软阈值算法求解稀疏解:
38、
39、
40、
41、
42、其中,表示;μi和θi分别表示训练的第一参数和第二参数;wi表示卷积运算;wit表示反卷积运算;k表示展开数;
43、s45:将dissloss函数作为网络模型的损失函数,表达式为:
44、
45、其中,yi表示作为标签图像的实际损伤位置图第i个像素点的标签;pi表示同一网络模型中同一层数下的传动装置故障定位优化图的第i个像素点有缺陷的预测概率;np表示标签和优化图像中的像素点总数。
46、可选的,所述s5中,最后结果的优化程度,根据作为测试输入的未优化的故障定位图,以及作为输出的优化后的故障定位优化图,各自的故障中心点分别与实际故障位置的距离大小来进行判别。
47、本发明的有益效果在于:本发明克服了传统旋转机械传动系统振动检测实际运用的安装不便、随设备一起振动、不适用于高温、高压和高腐蚀环境的局限性,以麦克风阵列的形式采集其运行过程中的声学信号,实现了对传统旋转机械传动装置的声学检测故障定位。并且该方法结合多层卷积稀疏编码和u-net网络,以通过成像算法生成的传动装置故障定位图作为输入,实现了从声学信号中提取出故障位置特征信息并精确重构,输出的故障定位优化图比原本具有更高的定位精度。同时这种网络模型的构建形式在一定程度上降低了深度学习方法网络模型复杂程度,减少了参数运算量,提供了一定的可解释性。
48、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!