一种降低多通道ANC全耦合控制算法计算量的方法与流程
本发明属于主动噪声控制领域,尤其涉及一种降低多通道anc全耦合控制算法计算量的方法。
背景技术:
1、噪声控制技术主要分为被动噪声控制(passive noisecontrol,pnc)和主动噪声控制(active noise control,anc)。
2、被动噪声控制主要是从声音传播的三要素着手来实现降噪,对中高频噪声具有较好的控制效果。主动噪声控制的基本原理是利用声波干涉原理,如图1所示,通过扬声器发出一个与噪声声波幅值相同、相位相反的声波,两者在空间上产生相干抵消,在一定的区域内产生“静区”,从而达到降噪的目的,对中低频噪声具有较好的控制效果。
3、主动降噪结构有前馈控制结构、反馈控制结构以及前反馈结合的控制结构。相较于反馈控制结构,前馈控制结构降噪频带更宽、稳定性更好、环境适应性更强,因此,目前常用的anc控制结构多为前馈控制结构。
4、理论上单通道主动降噪系统能够产生的静区的范围不会超过波长的十分之一,所以,在anc的实际应用场景中,为获取较大范围的“静区”往往会采用多通道的前馈控制结构,而采用全耦合的控制结构能够保证多通道anc系统的稳定性。
5、但是,对于一个存在i个参考传声器,j个次级扬声器,k个误差传声器的多通道anc系统,在i-j-k全耦合控制结构下,其存在i·j个控制器,j·k个次级通道,假设自适应控制器的阶数为l1,预估的次级通道传递函数的阶数为l2,那么基于fxlms的全耦合控制完成一次降噪计算和所有控制器的一次更新需要(ijk+ij)l1+ijkl2+ijk次乘法和[ijk+ij]l1+ijkl2-ijk-j次加法。
6、为了获取更好的降噪效果,控制器的阶数和预估的次级通道传递函数的阶数需要尽可能地高,无疑增加了每次迭代更新控制器系数所需的计算量,然而,系统的算力资源是有限的,不可能满足自适应全耦合控制算法庞大的算力需求。
7、为减少多通道anc全耦合控制算法的计算量,目前主要从两方面着手,一方面通过增加物理结构将多通道anc系统隔绝成多个单通道或者小型多通道结构,比如公开号为cn103994485a和cn112331174a的专利文献,对吸油烟机降噪,采用四通道的控制结构,通过将进风腔体结构分成四个进风通道,每个进风通道采用单通道控制结构,不考虑通道间的声耦合。这种从物理结构上进行改造的方式,虽然简化了主动降噪控制系统,降低了自适应控制算法对系统算力的需求,但是增加了设计难度和成本,同时,单通道控制结构中的误差传声器也会受到相邻通道中次级扬声器的影响,即声耦合,物理隔离并不能完全消除声耦合的影响,在进行降噪自适应控制的时候也无法保证系统的稳定性。
8、另一方面从算法软件层面着手,采用集群式、分布式、分散式等控制方式来降低系统所需计算量,比如采用集群式结构从算法层面将多通道控制结构划分成多个相互之间不进行通信的小型的全耦合控制结构,集群式控制结构忽略了各个小型控制结构之间的声耦合,但是这种方式会将系统稳定的条件变苛刻,而且也会影响整个系统的降噪性能。
9、综上所述,现有技术存在以下问题:1、物理上忽略声耦合影响,不仅增加结构设计复杂度,而且无法完全消除声耦合影响,系统稳定性从理论上无法保证;2、软件算法上忽略某些声耦合影响,系统稳定性的条件较全耦合控制系统的稳定条件苛刻;3、多通道anc全耦合控制的降噪性能越好,其所需的计算量也越高,所需成本也越高。
技术实现思路
1、本发明的目的在于解决多通道anc全耦合控制算法的计算量大,系统的稳定性差、成本高的问题,并提出一种降低多通道anc全耦合控制算法计算量的方法。
2、为了达到上述目的,本发明提供的技术方案为:
3、所述降低多通道anc全耦合控制算法计算量的方法,包括:
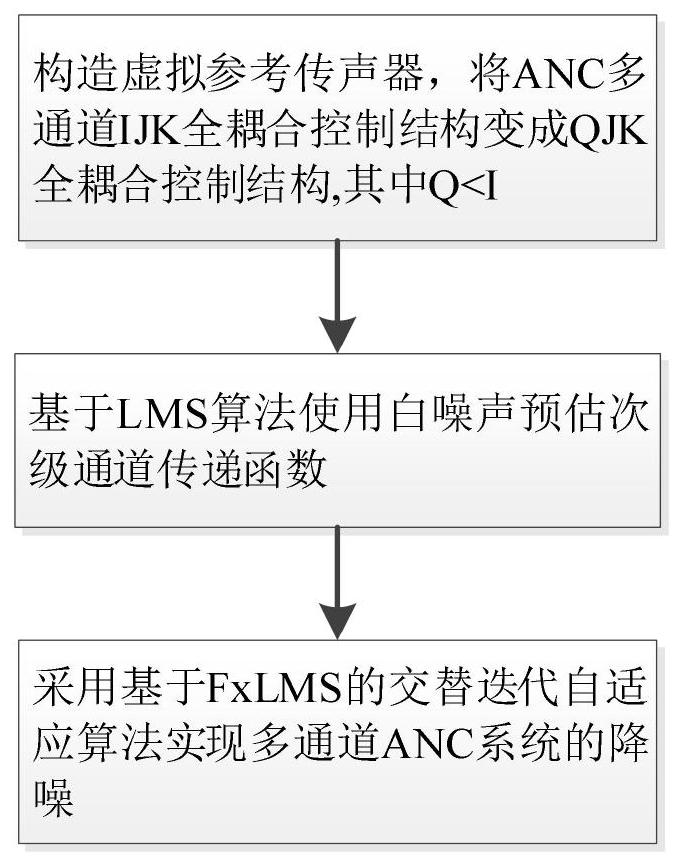
4、根据物理参考传声器构造虚拟参考传声器,将多通道anc的i-j-k全耦合控制结构转变成q-j-k全耦合控制结构,得到物理参考传声器的融合参数v,其中,i为物理参考传声器的个数,j为次级扬声器的个数,k为误差传声器的个数,q为虚拟参考传声器的个数;
5、基于lms算法使用白噪声预估次级通道传递函数;
6、构造用于交替迭代的控制器系数集合,根据物理参考传声器采集的噪声信号与融合参数v构造虚拟参考传声器的噪声信号;
7、根据虚拟参考传声器的噪声信号与控制器系数集合中的自适应控制器系数生成降噪信号,由各个次级扬声器发出;
8、基于虚拟参考传声器的噪声信号,采用基于fxlms的交替迭代自适应算法更新自适应控制器系数。
9、进一步的,所述根据物理参考传声器构造虚拟参考传声器,将多通道anc的i-j-k全耦合控制结构转变成q-j-k全耦合控制结构,得到物理参考传声器的融合参数v,包括:
10、物理参考传声器和误差传声器同时采集一定时间长度的噪声信号;
11、将物理参考传声器采集到的i个信号构造成q个虚拟参考传声器的信号,其中q<i。
12、进一步的,所述将物理参考传声器采集到的i个信号构造成q个虚拟参考传声器的信号,包括:
13、求解如下优化问题的最优解v,作为物理参考传声器的融合参数:
14、
15、其中,f(·,·)表示构造虚拟参考传声器的函数,c(·,·)表示两个信号的相干性,db(·)表示信号相干性对应的理论降噪量,r表示物理参考传声器采集的噪声信号,ek表示第k个误差传声器采集的噪声信号,k∈[1,k]。
16、进一步的,所述基于lms算法使用白噪声预估次级通道传递函数,包括:
17、每个次级扬声器轮流发出固定时长的白噪声,所有误差传声器接收当前次级扬声器发出的白噪声信号;
18、采用lms算法,分别估计每个次级扬声器与每个误差传声器之间的次级通道传递函数。
19、进一步的,所述用于交替迭代的控制器系数集合用am表示,其中,m=1,2,…,m,m为控制器系数集合的个数,各个集合非空且集合间无交集,即m1≠m2,a={w11,w12,…,w1j,w21,w22,…,w2j,…,wq1,wq2,…,wqj}为所有虚拟参考传声器和次级声源间的控制器系数集合。
20、进一步的,所述根据虚拟参考传声器的噪声信号与控制器系数集合中的自适应控制器系数生成降噪信号,包括:
21、根据每个虚拟参考传声器的噪声信号,构造xq(n)=[xq(n),xq(n-1),…,xq(n-l1+1)]t,与控制器系数集合中的自适应控制器系数生成降噪信号y(n)=[y1(n),y2(n),...,yj(n)]t;
22、其中,y(n)表示n时刻的降噪信号,表示n时刻第j个次级扬声器播放的信号,xq(n)=[xq(n),xq(n-1),…,xq(n-l1+1)]t表示第q个虚拟参考传声器在不同时刻的信号值,xq(n)表示n时刻第q个虚拟参考传声器的噪声信号,[]t表示转置操作,表示n时刻转置后的第q个虚拟参考麦克风与第j个次级扬声器所对应的自适应控制器系数,l1为自适应控制器系数wqj的长度。
23、进一步的,所述采用基于fxlms的交替迭代自适应算法更新自适应控制器系数,包括:
24、步骤1:初始化m=1,迭代更新控制器系数集合am中的自适应控制器系数,其余的控制器系数集合保持历史值不变;
25、步骤2:利用虚拟参考传声器的噪声信号、估计的次级通道传递函数和误差传声器采集的噪声信号e(n)=[e1(n),e2(n),…,ek(n)]t,分别对控制器系数集合am中的每个自适应控制器系数wi,wi∈am进行更新,其更新方式如下:
26、
27、其中,i表示属于am集合的控制器的下标,wi(n+1)表示n+1时刻am中第i个自适应控制器系数,wi(n)表示n时刻am中第i个自适应控制器系数,uik(n)=[uik(n),uik(n-1),…,uik(n-l1+1)]t为中间变量,k表示第k个误差传声器,k∈[1,k],q和j共同构成下标i,表示sjk的转置,x′q(n)=[xq(n),xq(n-1),…,xq(n-l2+1)]t,l2表示次级通道传递函数的系数sjk的长度,ek(n)表示n时刻第k个误差传声器采集的噪声信号,μ为迭代步长;
28、步骤3:计算当前控制器系数集合am中自适应控制器系数的变化量其中,||·||2表示2范数,若变化量δ低于预设的第一阈值,进入步骤4,否则,重新构造虚拟参考传声器的噪声信号并生成降噪信号后进入步骤2;
29、步骤4:停止当前控制器系数集合am中自适应控制器系数的更新并固定当前控制器系数集合am中自适应控制器系数不变,令m=m+1,若m≤m,重新构造虚拟参考传声器的噪声信号并生成降噪信号后进入步骤2,否则,进入步骤5;
30、步骤5:判断所有自适应控制器系数的变化量总和是否低于预设的第二阈值,若否,则重新构造虚拟参考传声器的噪声信号并生成降噪信号后,执行步骤1到步骤4,否则完成自适应控制器系数的更新。
31、本发明与现有技术相比,其显著优点为:1、本专利构造了一个虚拟参考传声器,将多通道anc的i-j-k全耦合控制结构转变成q-j-k全耦合控制结构,其中q<i,因此,控制器的数量由原来的i·j个减少到q·j个,可使计算量几乎缩减至原来的q/i。2、构造的虚拟参考传声器能够保证其与每个误差传声器有最好的相干性和最大的理论降噪量,大大提高了多通道anc系统的降噪性能。3、交替迭代自适应控制器系数,虽然增加了系统稳定收敛的时间,但是却大大减少多通道全耦合自适应控制的计算量,节省出来的算力可以用于增加控制器阶数和次级通道传递函数阶数,进而提高anc系统的降噪性能。
- 还没有人留言评论。精彩留言会获得点赞!